






1. 主要内容
本文研究柴电动力机车控制的建模与分析问题,首先,基于柴电动力机车系统建立了柴电动力机车转速控制的状态空间模型。根据任务书给定的参数,对系统进行能控性、能观性的分析,应用现代控制理论,选取了期望极点,对状态反馈控制器增益矩阵和状态反馈观测器增益矩阵进行计算,搭建了simulink仿真模型,验证其正确性。利用MATLAB语言工具将状态空间模型转换为传递函数模型,应用经典控制理论,对阶跃响应输出,伯德图、奈奎斯特图进行稳定性分析。
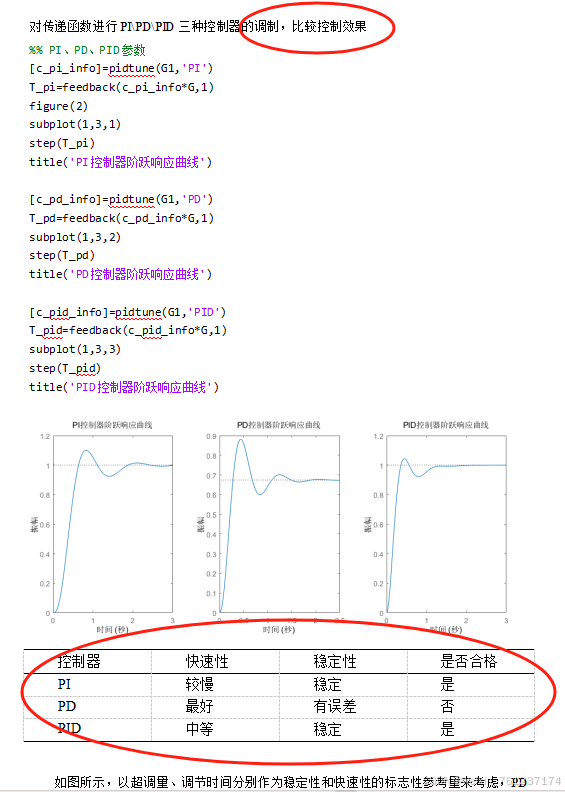
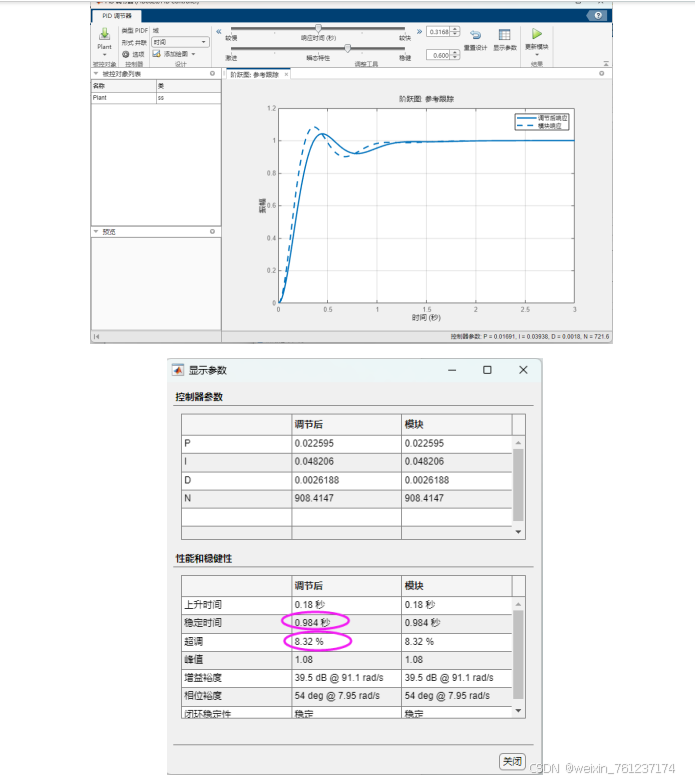
之后采用PI、PD、PID三种控制器使得系统稳定。采用MATLAB环境自带的参数自整定方法确定了控制器的参数值,经过快速性和稳定性的对比,最终取PID控制器为最具优越性的控制方案,在此基础上,采用PIDTuner对参数进行优化,符合稳态误差ess<2%;调节时间<1s;超调量小于10%的设计要求。
目录
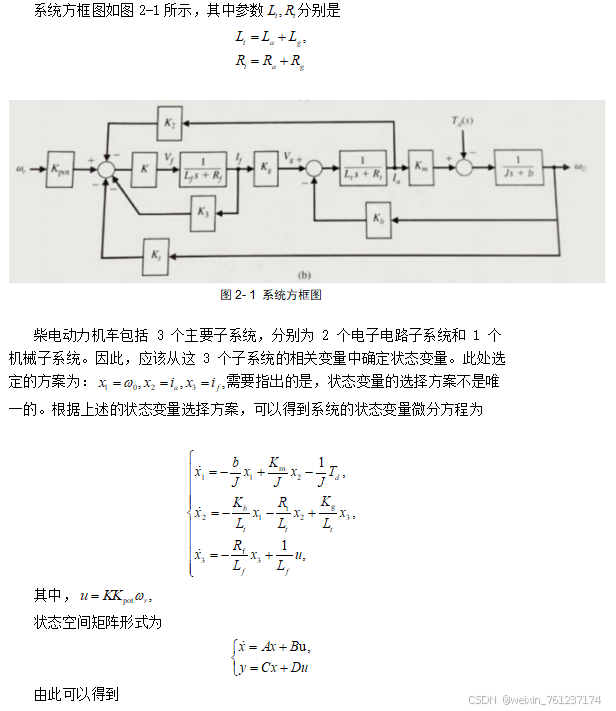
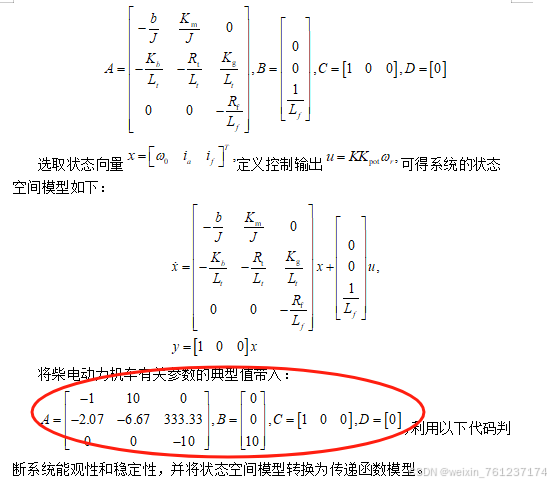
2. 柴电动力机车系统建模
实现代码如下:
clc
clear all
close all
%% 建模
A=[-1 10 0;-2.07 -6.67 333.33;0 0 -10];
B=[0;0;10];
C=[1 0 0];
D=[0];
G=ss(A,B,C,D)
[A,B,C,D]=ssdata(G)%状态空间模型
G1=tf(G)%传递函数模型
figure(1)
step(G1)
3. 控制系统分析
3.1 经典理论分析
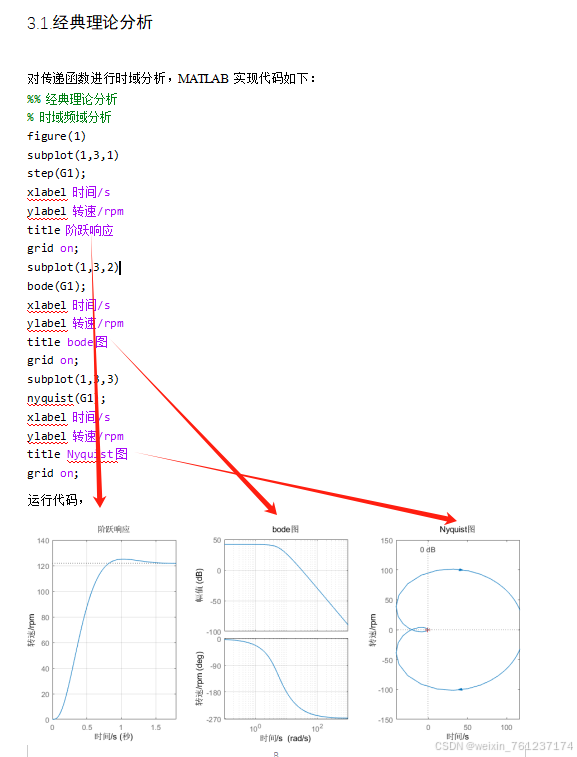
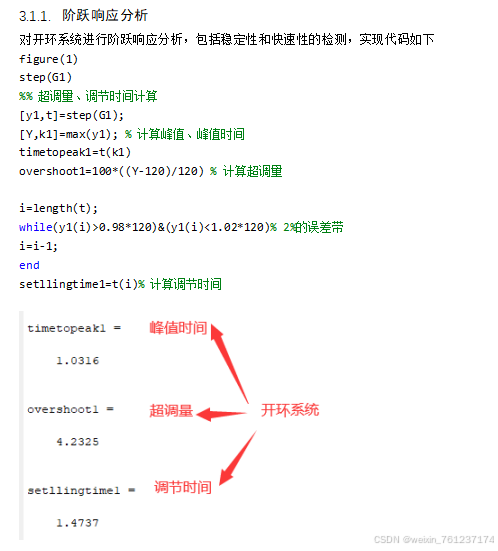
对阶跃响应的快速性和稳定性进行分析,实现代码如下:
对伯德图进行分析:
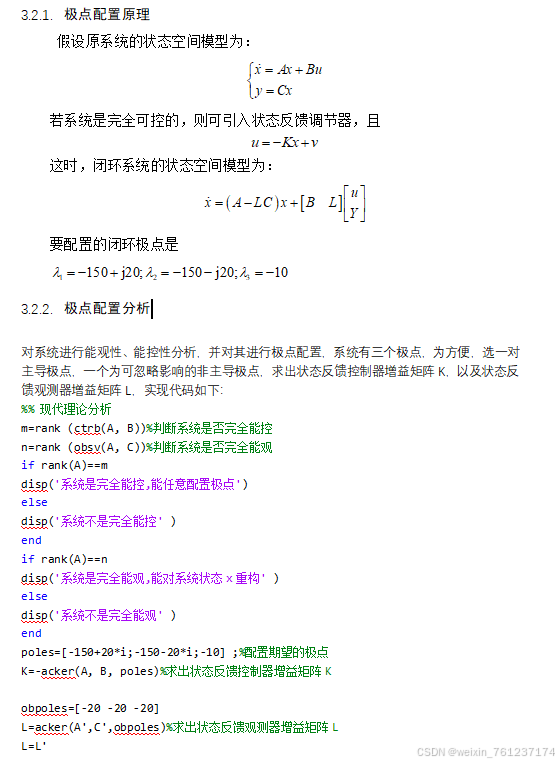
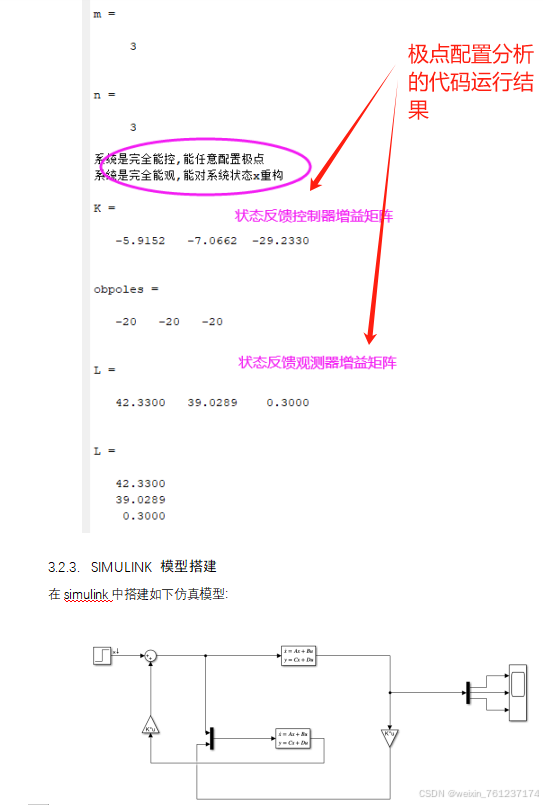
3.2 现代理论分析
4.PID控制器的设计和优化
4.1 PID控制器设计
4.2 PID参数优化



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











