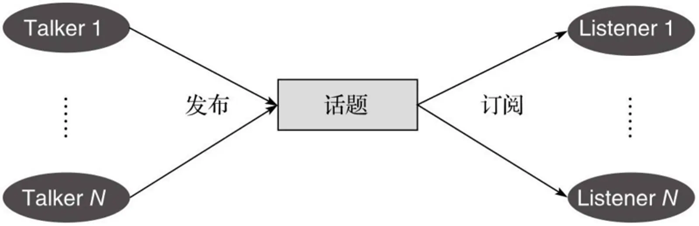
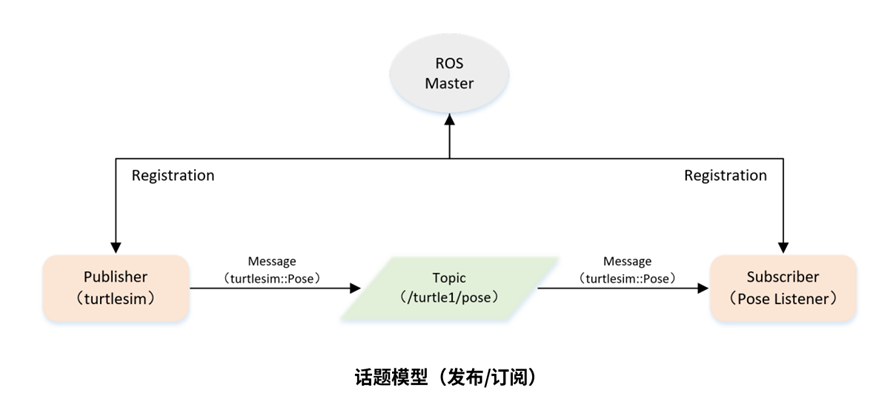
目录 小海龟仿真器中的Publisher和Subscriber 实际案例(小乌龟实现匀速跑圈) 代码编译 每文一语 消息以一种发布/订阅(Publish/Subscribe)的方式传递。 一个节点可以针对一个给定的话题(Topic)发布消息(称为发布者/Talker),也可以关注某个话题并订阅特定类型的数据(称为订阅者/Listener)。 发布者和订阅者并不了解彼此的存在,系统中可能同时有多个节点发布或者订阅同一个话题的消息。 当创建一个发布者(Publisher)或订阅者(Subscriber)时,需要向ROS Master注册,之后才可以进行通信。 小海龟仿真器中的Publisher和Subscriber 启动小海龟仿真器 roscore








 本文介绍了ROS中使用Publisher和Subscriber控制小乌龟匀速跑圈的案例。通过创建速度发布者节点,发布指定速度值到/turtle1/cmd_vel话题,实现小乌龟的运动控制。在实践中,首先启动小海龟仿真器,然后编写并编译cpp代码,设置几何图元消息库中的Twist消息,最后运行节点使小乌龟进行匀速跑圈。
本文介绍了ROS中使用Publisher和Subscriber控制小乌龟匀速跑圈的案例。通过创建速度发布者节点,发布指定速度值到/turtle1/cmd_vel话题,实现小乌龟的运动控制。在实践中,首先启动小海龟仿真器,然后编写并编译cpp代码,设置几何图元消息库中的Twist消息,最后运行节点使小乌龟进行匀速跑圈。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








