






1. 说到Stream便容易想到I/O Stream,而实际上,谁规定“流”就一定是“IO流”呢
在Java 8中,得益于Lambda所带 来的函数式编程,引入了一个全新的Stream概念,用于解决已有集合类库既有的弊端。
2.传统集合的多步遍历代码 几乎所有的集合(如 Collection 接口或 Map 接口等)都支持直接或间接的遍历操作。而当我们需要对集合中的元 素进行操作的时候,除了必需的添加、删除、获取外,最典型的就是集合遍历。例如:
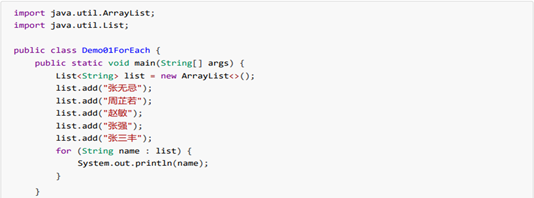
这是一段非常简单的集合遍历操作:对集合中的每一个字符串都进行打印输出操作。
3.循环遍历的弊端 Java 8的Lambda让我们可以更加专注于做什么(What),而不是怎么做(How),这点此前已经结合内部类进行 了对比说明。现在,我们仔细体会一下上例代码,可以发现: for循环的语法就是“怎么做” for循环的循环体才是“做什么” 为什么使用循环?因为要进行遍历。但循环是遍历的唯一方式吗?遍历是指每一个元素逐一进行处理,而并不是从 第一个到最后一个顺次处理的循环。前者是目的,后者是方式。 试想一下,如果希望对集合中的元素进行筛选过滤:
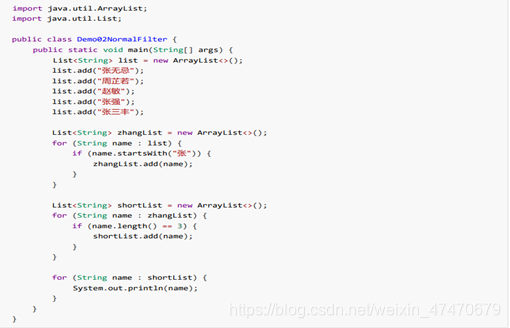
- 将集合A根据条件一过滤为子集B;
- 然后再根据条件二过滤为子集C。 那怎么办?在Java 8之前的做法可能为:
这段代码中含有三个循环,每一个作用不同: 1. 首先筛选所有姓张的人; 2. 然后筛选名字有三个字的人; 3. 最后进行对结果进行打印输出。 每当我们需要对集合中的元素进行操作的时候,总是需要进行循环、循环、再循环。这是理所当然的么?不是。循 环是做事情的方式,而不是目的。另一方面,使用线性循环就意味着只能遍历一次。如果希望再次遍历,只能再使 用另一个循环从头开始。 那,Lambda的衍生物Stream能给我们带来怎样更加优雅的写法呢?
4.Stream的更优写法 下面来看一下借助Java 8的Stream API,什么才叫优雅:
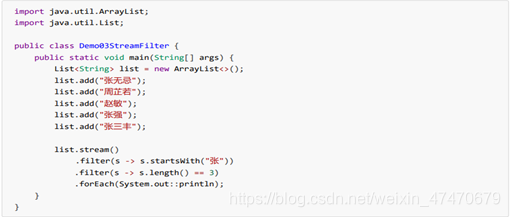
直接阅读代码的字面意思即可完美展示无关逻辑方式的语义:获取流、过滤姓张、过滤长度为3、逐一打印。代码 中并没有体现使用线性循环或是其他任何算法进行遍历,我们真正要做的事情内容被更好地体现在代码中。
Stream(流)是一个来自数据源的元素队列 元素是特定类型的对象,形成一个队列。 Java中的Stream并不会存储元素,而是按需计算。 数据源 流的来源。 可以是集合,数组 等。 和以前的Collection操作不同, Stream操作还有两个基础的特征: Pipelining: 中间操作都会返回流对象本身。 这样多个操作可以串联成一个管道, 如同流式风格(fluent style)。 这样做可以对操作进行优化, 比如延迟执行(laziness)和短路( short-circuiting)。 内部迭代: 以前对集合遍历都是通过Iterator或者增强for的方式, 显式的在集合外部进行迭代, 这叫做外部迭 代。 Stream提供了内部迭代的方式,流可以直接调用遍历方法。 当使用一个流的时候,通常包括三个基本步骤:获取一个数据源(source)→ 数据转换→执行操作获取想要的结 果,每次转换原有 Stream 对象不改变,返回一个新的 Stream 对象(可以有多次转换),这就允许对其操作可以 像链条一样排列,变成一个管道。
获取流 java.util.stream.Stream 是Java 8新加入的最常用的流接口。(这并不是一个函数式接口。) 获取一个流非常简单,有以下几种常用的方式: 所有的 Collection 集合都可以通过 stream 默认方法获取流; Stream 接口的静态方法 of 可以获取数组对应的流。 根据Collection获取流 首先, java.util.Collection 接口中加入了default方法 stream 用来获取流,所以其所有实现类均可获取流。
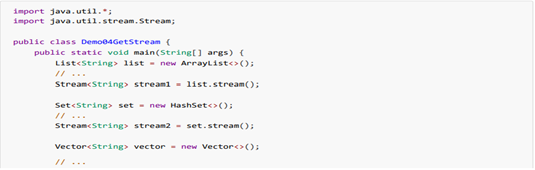
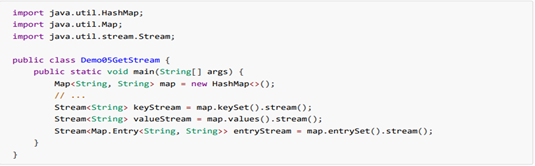
根据Map获取流 java.util.Map 接口不是 Collection 的子接口,且其K-V数据结构不符合流元素的单一特征,所以获取对应的流 需要分key、value或entry等情况:
根据数组获取流 如果使用的不是集合或映射而是数组,由于数组对象不可能添加默认方法,所以 Stream 接口中提供了静态方法 of ,使用很简单:

备注: of 方法的参数其实是一个可变参数,所以支持数组。

















 1869
1869

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









