






一 引言
天文导航是以已知准确空间位置、不可毁灭的自然天体为基准,被动探测天体位置,经解算确定测量点所在平台的经度、纬度、航向和姿态等信息。其中以通过对恒星成像进行光电转换获取星点信息进行姿态确定的星敏感器应用最为广泛,他主要包括两个部分:星点提取和星点识别,本文主要关注前者成像器件本身的噪声缺陷、光学结构的设计缺陷和空间辐射等等会导致星敏感器拍摄星图背景灰度均值增大, 背景起伏明显,会出现大量散点噪声,甚至出现伪星点,另一方面星敏感器探测的是微弱的恒星星光,对为日光、月光和地气光等杂散辐射源非常敏感,主要呈现为斜坡噪声。
传统的几何方法主要需要针对某一种情况下的某种应用,当成像器件、光学环境和空间环境等发生变化时,相应的方法也会发生改变。使用全卷积神经网络可在不改变网络结构的情况下,通过更改训练样本,灵活实现星点提取。具体到本文,主要解决三个方面的问题:1不同背景均值下的提取,2散点噪声包括伪星点下的提取,3斜坡噪声下的提取。
二基于全卷积神经网络的星点提取算法
为了保证输入图像的任意性,本文采用全卷积神经网络。
每个像素是否是星点的一部分,需要另外考虑他周围像素值的大小,一般来说,星点直径一般在7×7,为提取到边缘信息,本文多加考虑2层背景像素,即9×9,考虑到采用灰度图像,输入通道为1,最终最小输入图像为1×9×9
前四层采用3×3大小的卷积核,最后一层采用1*1大小的卷积核,另外前四层后加激活函数,为缓解均值偏移和避免神经元死亡,采用ReLU函数的改进激活函数PReLU,斜率α取0.25,同时由于单个星点像素识别的精确性,需保证各个像素信息不丢失,不加入池化层。
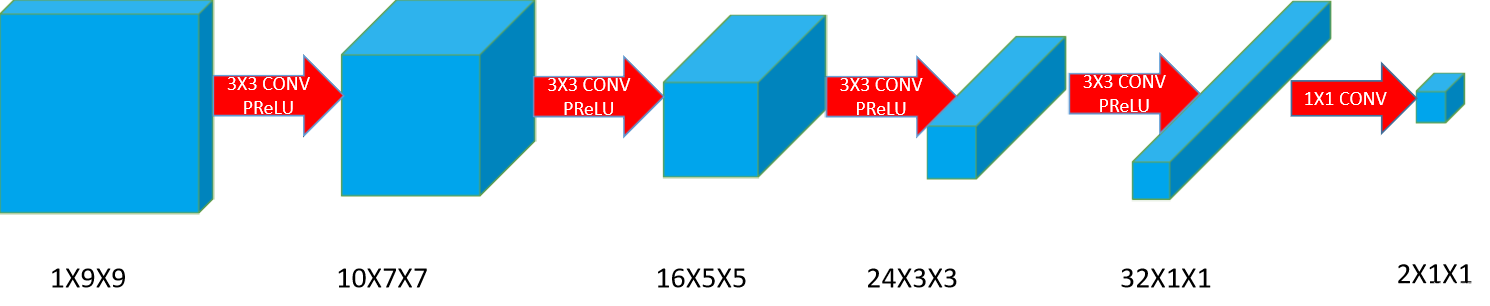
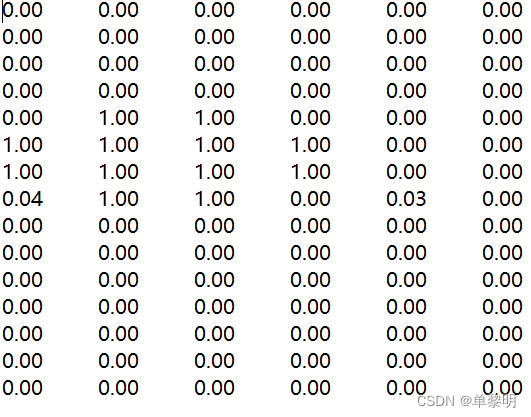
将样本分为三类,一类为星点像素,标签值为1,一类为背景,标签值为0,第三类为伪星点,比较类似于星点,可以定义其标签值为0.5。因此我们可以定义输出结果1-0.75的皆是星点像素,0.75-0为非星点像素。
三测试
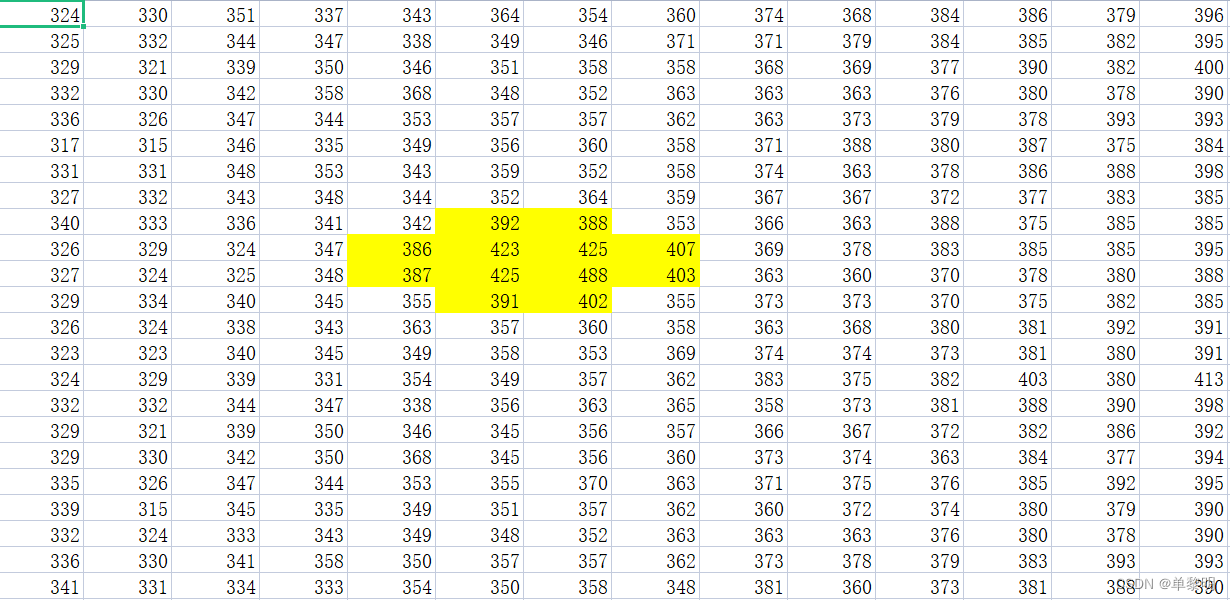
低像素值背景(260-290)下的提取
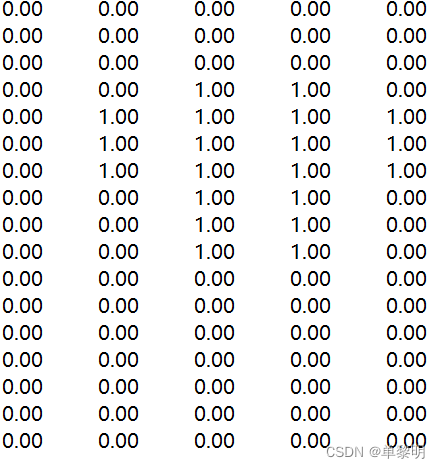
 黄色为星点范围,下图为结果
黄色为星点范围,下图为结果

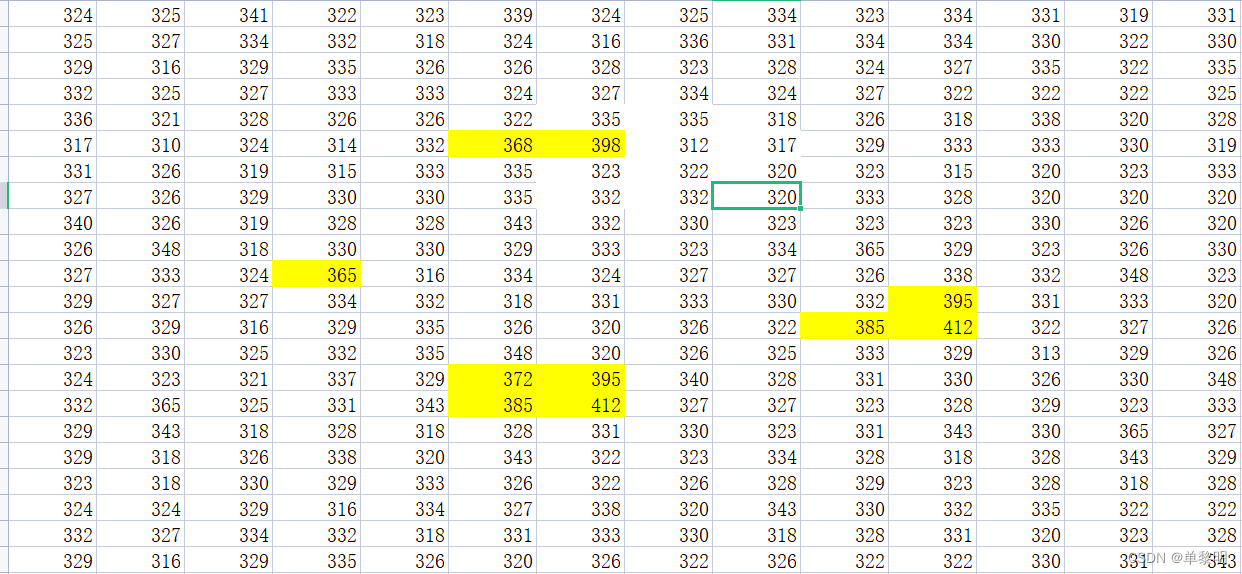
中像素值背景(310-340)下的提取

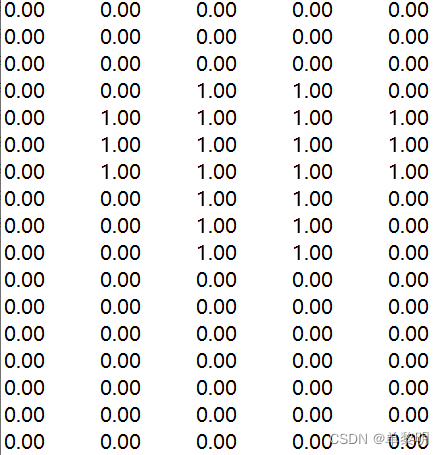
黄色为星点范围,下图为结果
高像素值背景(360-390)下的提取

黄色为星点范围,下图为结果
斜坡噪声下的提取,从左到右,每一列像素值加5
黄色为星点范围,下图为结果
散点噪声
黄色为噪声范围,下图为结果,可以看到高像素的干扰噪声都已经被基本消灭,唯一露头的0.36也不影响判断(在0.75以下)

四代码详情
见详情
承接软件工程,详情私信


















评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包










