









序:
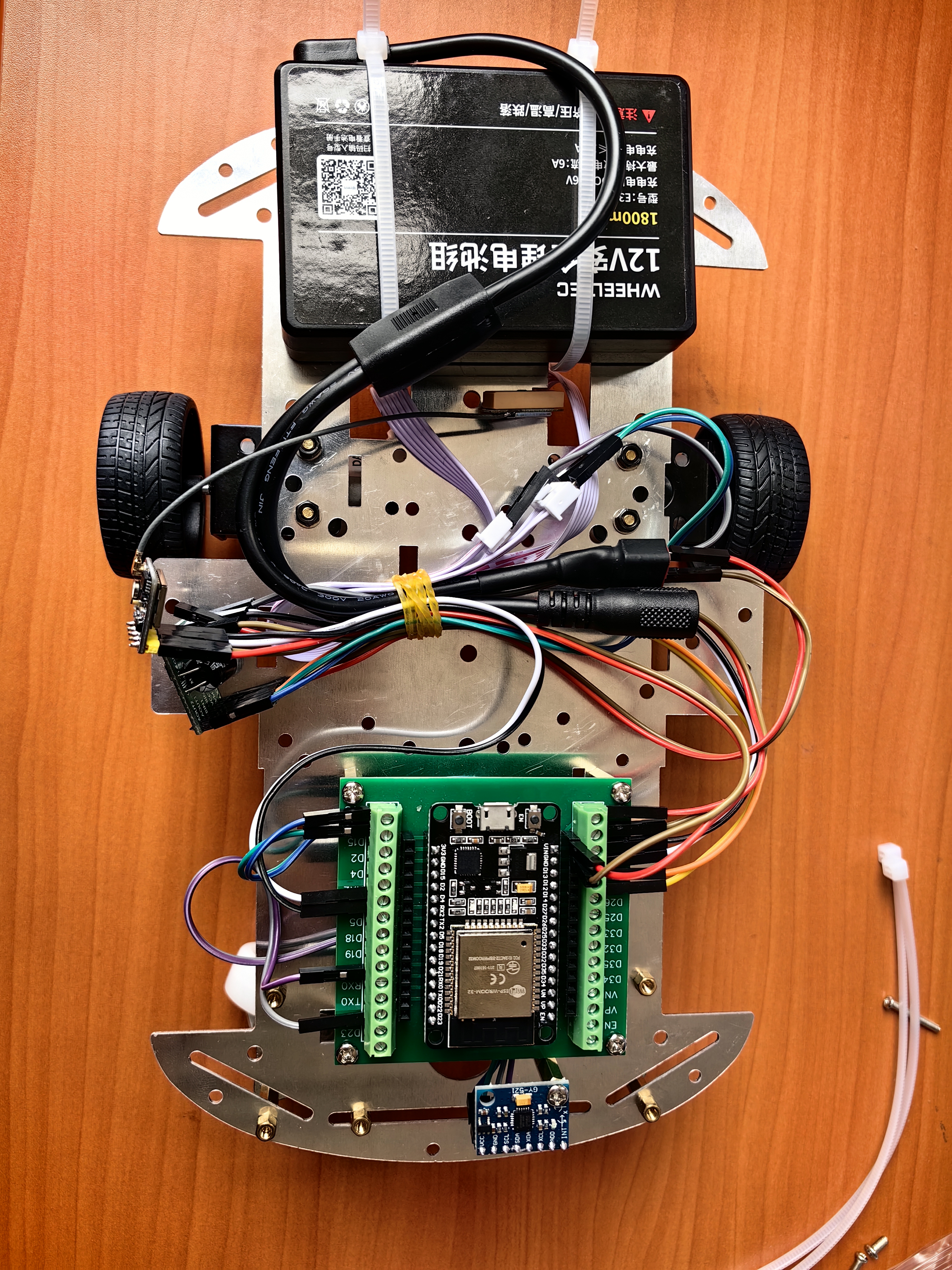
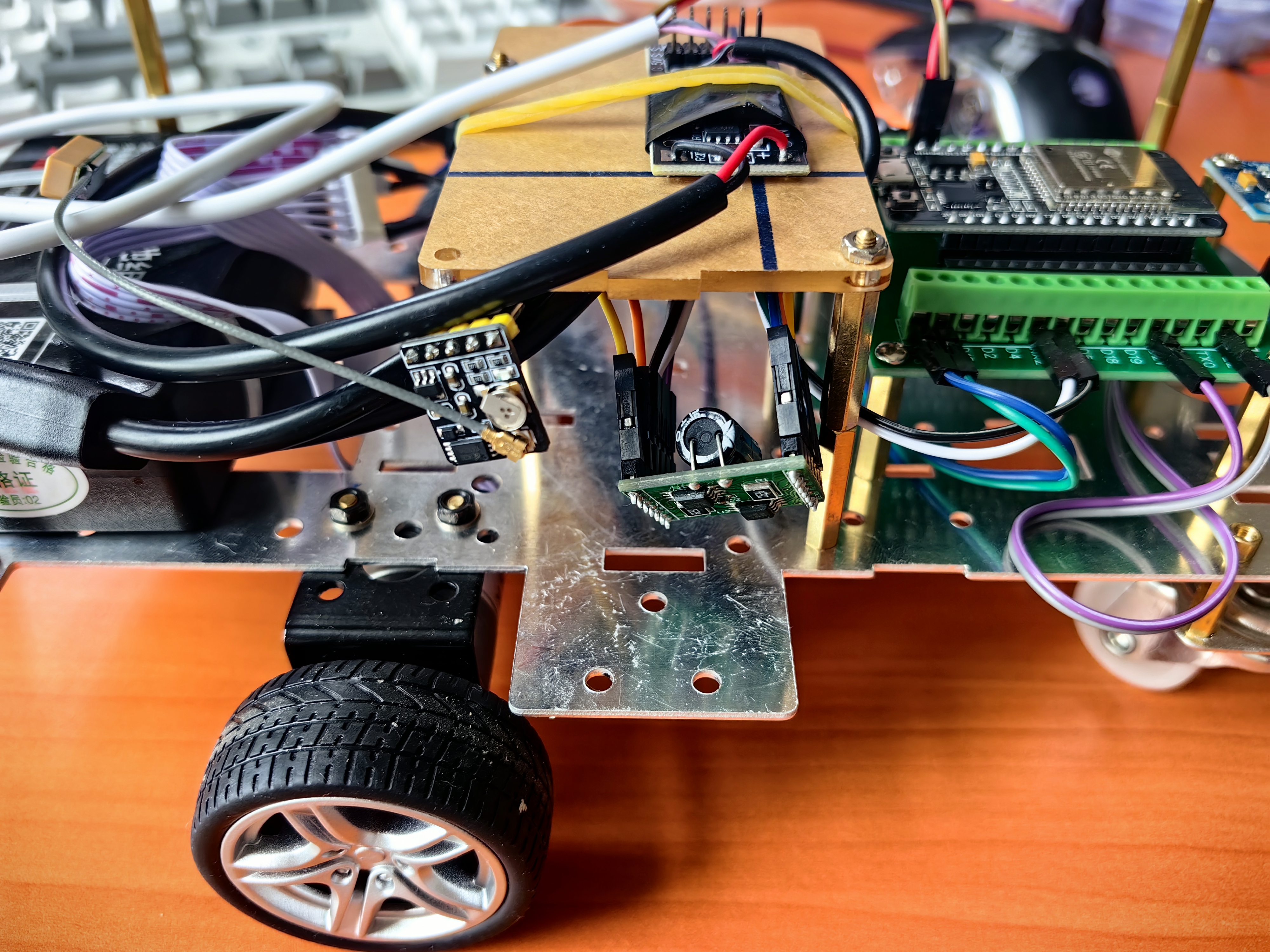
这里先放一张将之前所有节提到过的配件组装及整理线路后的小车图片(我这里使用了铁的板子,存在风险,建议使用亚克力板)
从下图中我们可以看到电源出来的线有两根,一根已经使用杜邦线给A4950供电,另一根还剩余,这节我们将说明怎么使用这根线给其他设备供电。
参考资料:
零件说明:ROS2进阶 – 硬件篇第一章 – 使用ESP32,树莓派5,ROS2 从零组装一台差速控制的机器人
环境配置:ROS2进阶 – 硬件篇第二章 – 使用 ESP32 DEVKIT_V1 开发板基于 Arduino IDE 的环境搭建教程 windows / ubuntu 双系统安装
视频讲解:第七节:ESP32通过PID实现霍尔编码电机的速度控制
第一节:ROS2进阶 – 硬件篇第三章第一节 – ESP32 DEVKIT_V1捕获MG310霍尔编码电机的脉冲
第二节:ROS2进阶 – 硬件篇第三章第二节 – ESP32 DEVKIT_V1读取MPU6050姿态数据
第三节:ROS2进阶 – 硬件篇第三章第三节 – ESP32 DEVKIT_V1通过串口获取ATGM336H GPS定位数据
第四节:ROS2进阶 – 硬件篇第三章第四节 – ESP32 DEVKIT_V1通过PID实现霍尔编码电机的速度控制,使用
A4950驱动板
1. 本节需要准备的东西
DC单头线,两根USB线,分别给树莓派和ESP32供电,两排针,接下来需要焊电路板
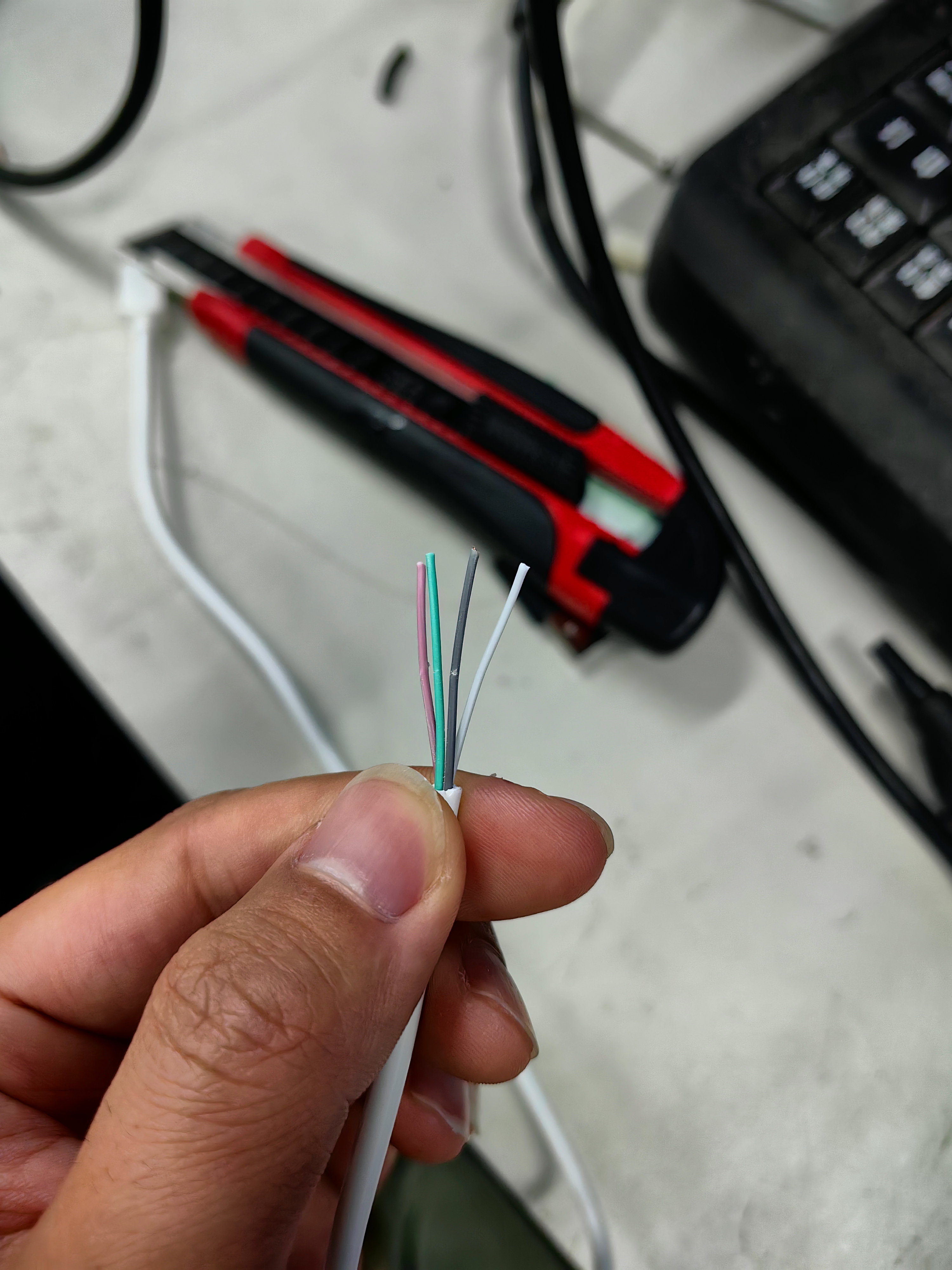
将两根USB线剪到合适的长短,USB线剪开后有4根线(如下图所示),红色的是正极,黑色的是负极,剩余两根是数据传输线,将剩余两根剪短,只留正负两根即可
焊接方式如下,下面的输入是DC单头线,这个DC线将连接电源供电,上面两根USB线连在输出口给ESP32和树莓派供电,在上方焊两排针
因为这个分电板比较裸露,就将其与亚克力板绑在一起
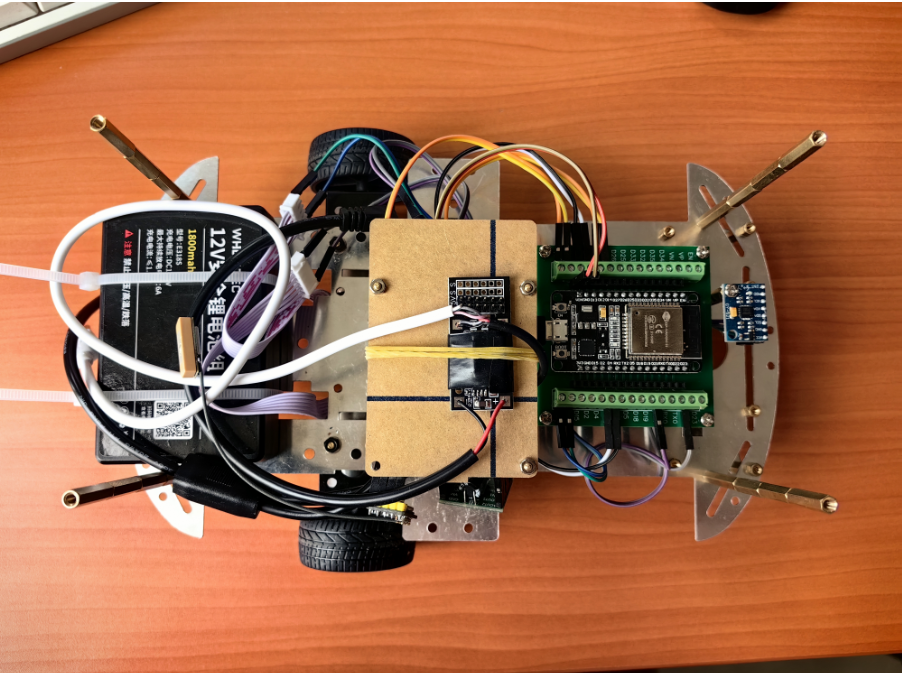
组装好就是下面的图片
到此我们已将所有的底层配件已将供电问题完成,接下来的章节将进行树莓派和MicroROS通信的学习



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









