









问题:在使用robotstudio仿真或者ABB机器人实操初期,经常会因这几个坐标系的关系困惑。经过一段时间研究终于理清它们的关系。
大地坐标:
也就是说其他的坐标系都是由大地坐标转换而来的,使用时不需要去改变大地坐标,一般根据需要定义工件坐标即可。
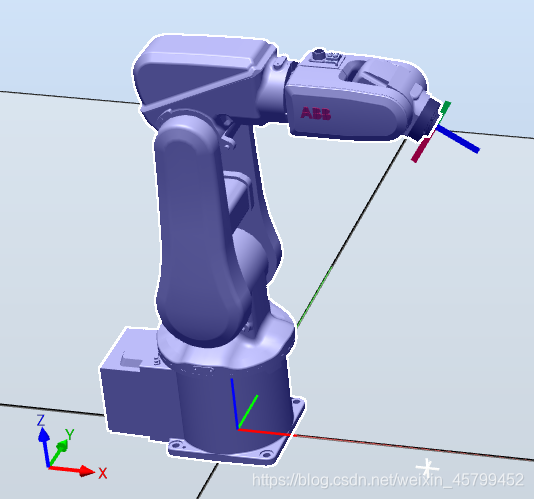
基坐标:
基坐标是位于机器人基座的坐标系,其默认方向与大地坐标相同,如图所示
重点来了,在robotstudio和实操中怎么查看和修改基坐标系
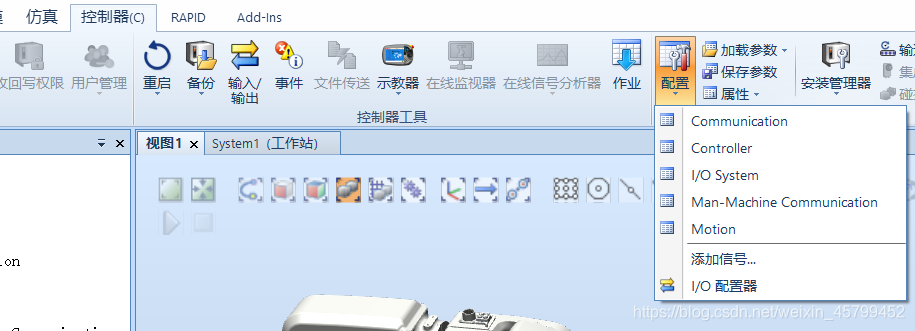
1、在robotstudio中查看和修改基坐标系:
控制器->配置->Motion->Robot
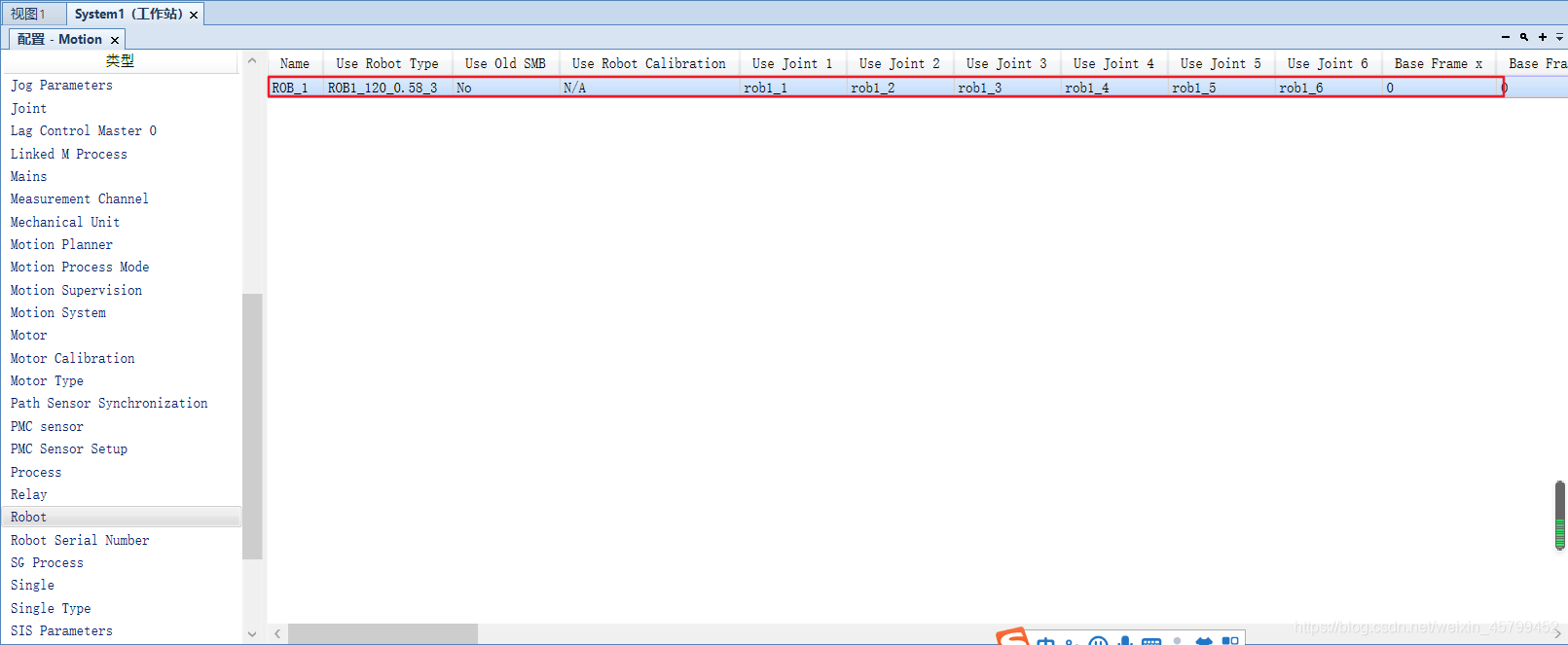
双击红色框,弹出窗口
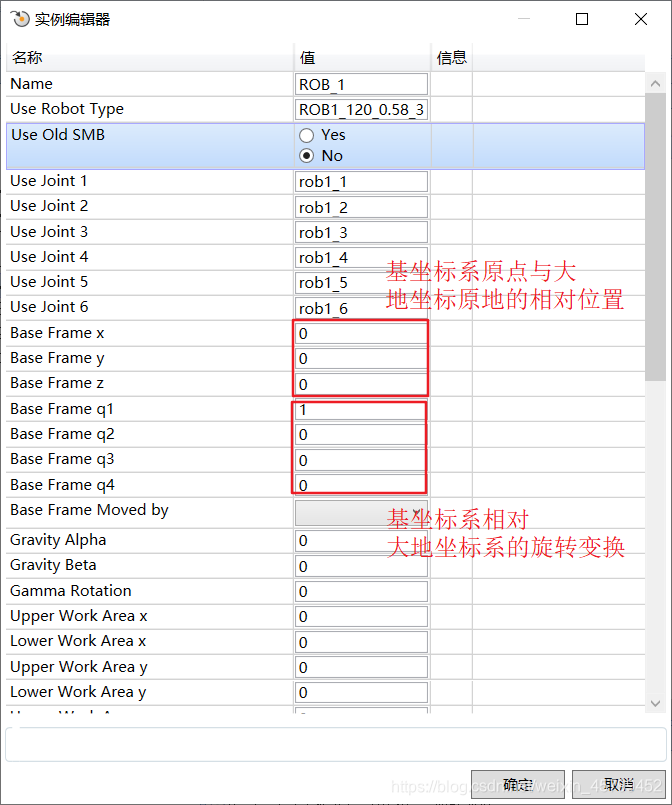
修改后需要重启
2、在实操中查看和修改基坐标系
将ABB机器人示教器中的系统备份到U盘后,点开备份下来的文件夹
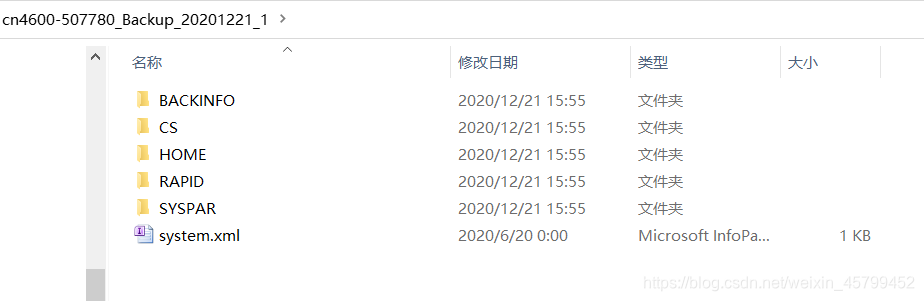
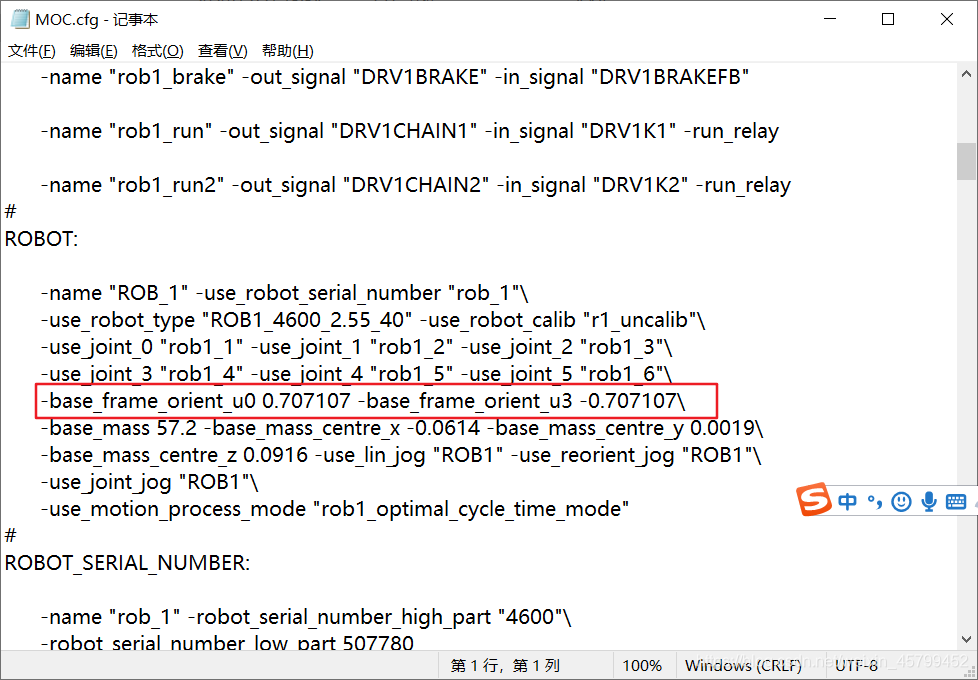
进入SYSPAR文件夹,打开MOC.cfg文件,红框内即是基坐标系的参数。
工件坐标wobj0
默认工件坐标系wobj0与大地坐标相同

机器人的移动指令都需要工件坐标,所以可以看出工件坐标的重要性。移动指令中没有指定工件坐标则是使用默认的工具坐标wobj0.
又一个重点来了:
机器人是根据工件坐标(假设只是用wobj0)去动作的,我们必须清楚工件坐标才能准确的控制机器人的动作。所以需要明确机器人的工具坐标系,其实也就是大地坐标系。但是实际中的大地坐标系是看不见摸不着的,但是机器人的基坐标系是固定的。所以可以通过基坐标系来反推大地坐标系
以上都是本人查阅资料以及实操经验得出的结论,如有不同见解,欢迎谈论交流

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









