






week4
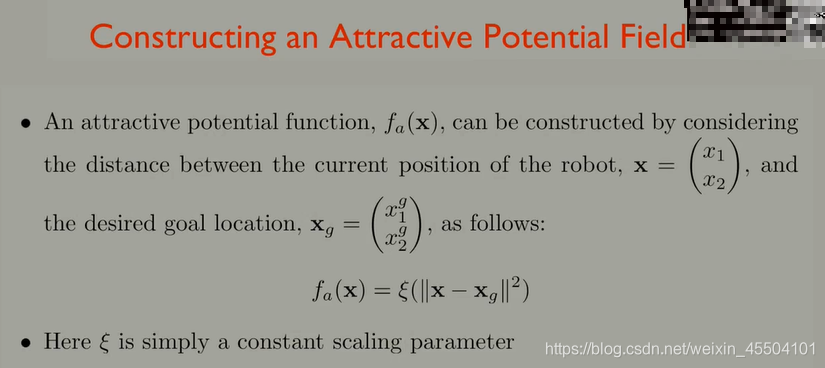
这期介绍人工势场artificial potential fields
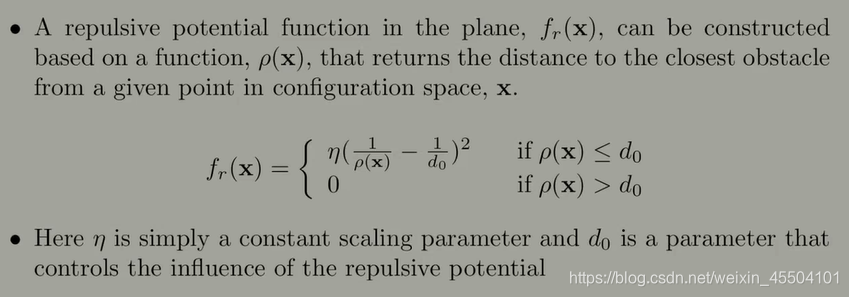
斥力场
control strategy
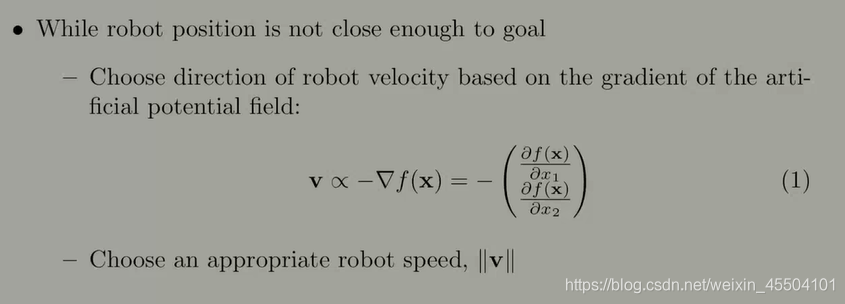
人工势场法的问题就是,当引力=斥力,机器人就会停止不动,而那个点并不一定是你的目标点
这一章结束啦,主要讲路径规划的东西
三个算法:grassfire、Dijlstra、A*
引入configuration space的概念研究避障
三种方法:可视图、梯形分解图和栅格图
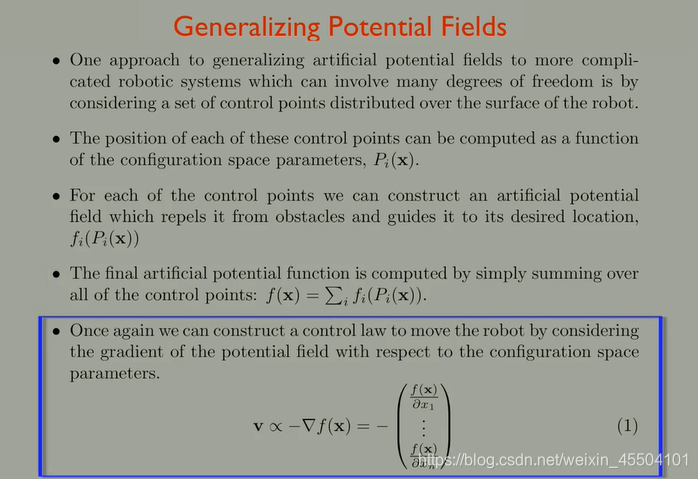
RRT算法(单树和双树)和人工势场法
第二板块看完,笔者本身之前接触过相关的算法,所以基本概念都还是知道的。看这个课程本身也是为了更加体系化,由于本人英语不是很好,这个课程都是全英文,因此有些地方为了避免误解用了英文。这个版块不像之前那个还有单独的matlab教学,所以作业都比较难,就不贴了。

















 694
694

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









