






week4
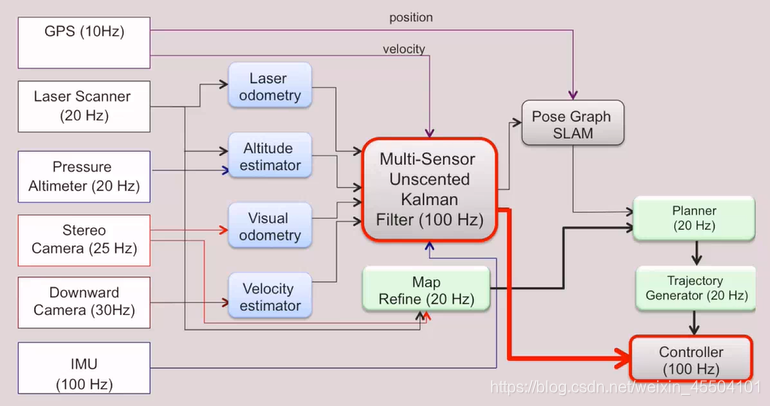
先介绍了无人机搭载的传感器,相机或GPS等
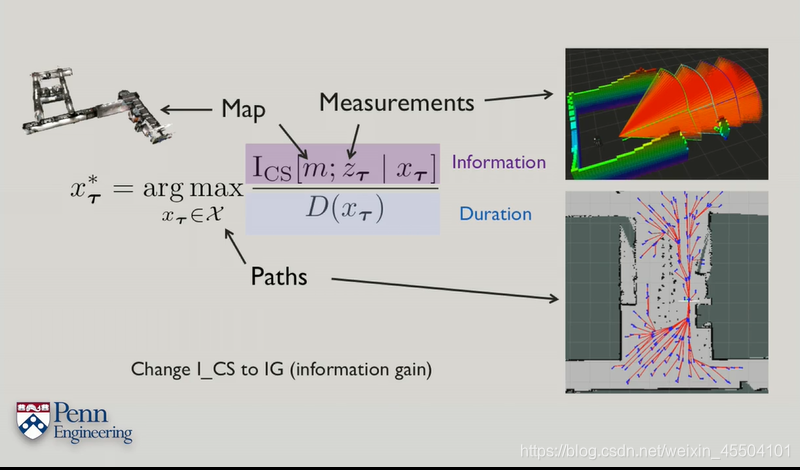
这次讲SLAM问题
Simultaneous Localization and Mapping also Structure from Motion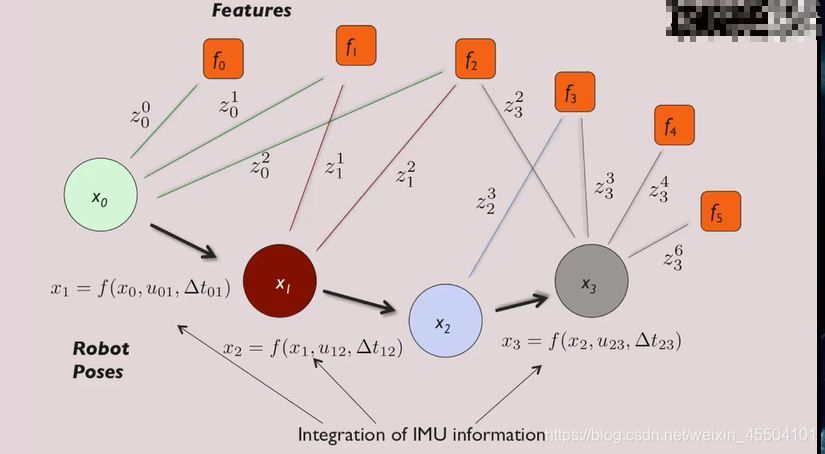
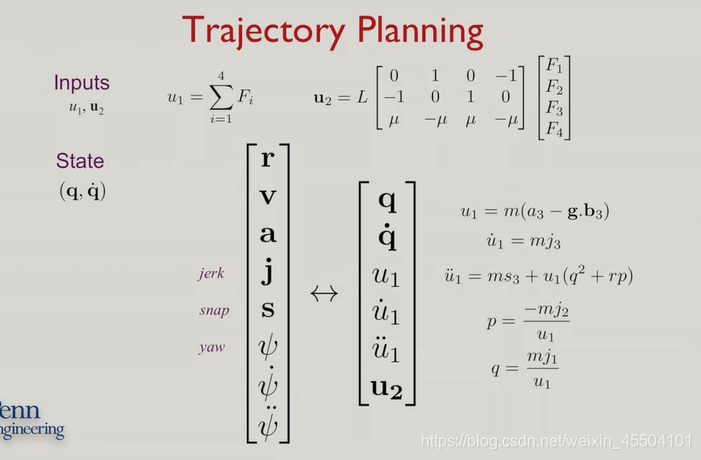
总控制
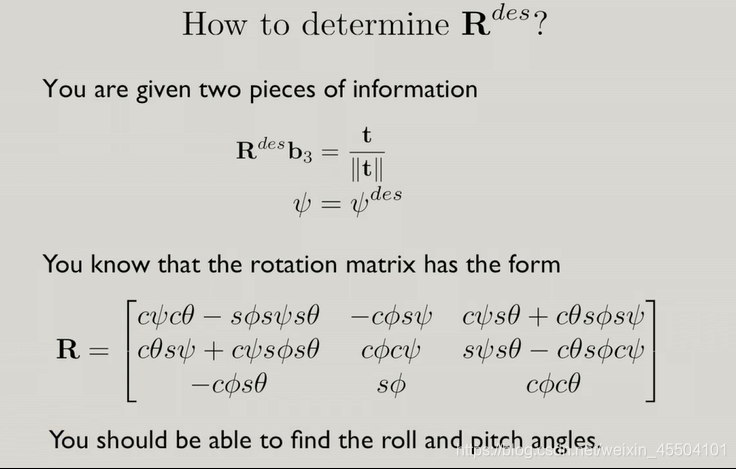
之前为了简化模型,将滚转角和俯仰角趋近于0,但实际上并不适用
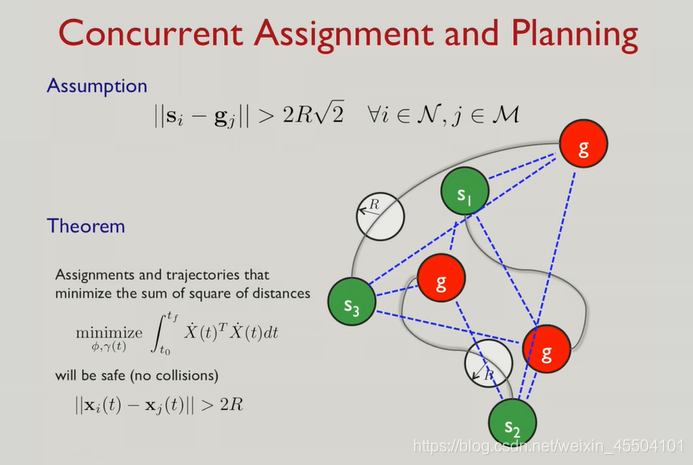
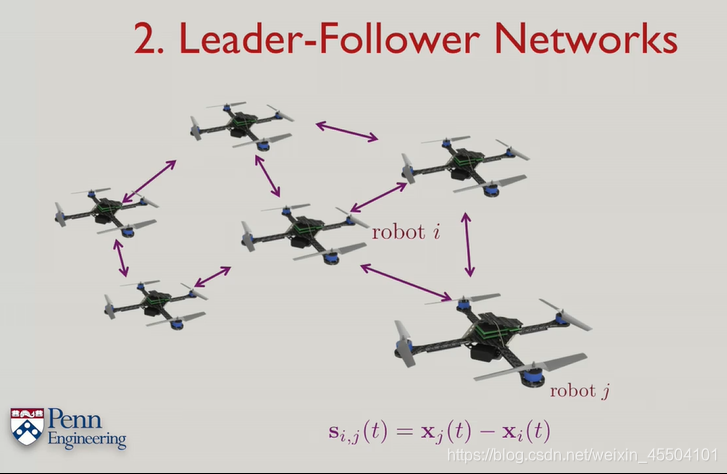
无人机编队/协同控制
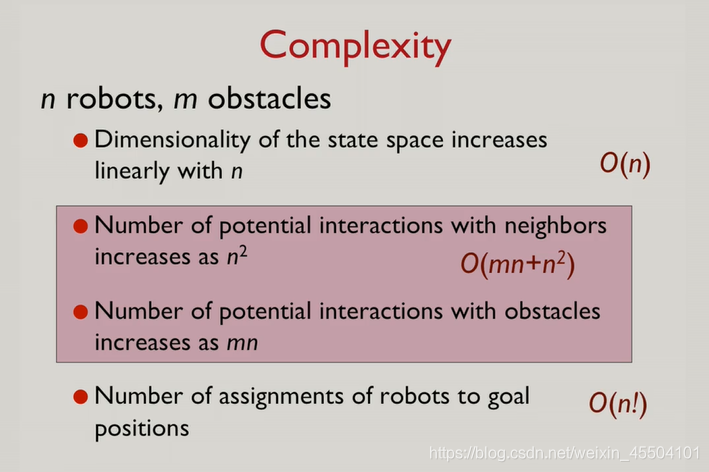

匈牙利算法
感觉这讲就是个预告,介绍了很多东西:实时控制、地图构建、非线性模型、编队控制等等但是都没有深讲
这周的作业真的难
一共两部分,一部分是三维的控制器pd控制
还有一个是traj_generator.m,策略路径生成飞过已知的点
这个是真的不会,我在github看了一些,好像也都运行不了。
结果就不贴了,会的大神可以指教


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









