







 博客围绕单片机超声波测距展开。使用的超声波模块为HC - SR04,介绍其4个接口及功能。阐述了与单片机的连接方式,调试程序时需参考数据手册的时序图,还需用定时器0记录高电平时间、定时器1启动模块。给出实现测距及数码管显示的步骤,并提及完整代码。
博客围绕单片机超声波测距展开。使用的超声波模块为HC - SR04,介绍其4个接口及功能。阐述了与单片机的连接方式,调试程序时需参考数据手册的时序图,还需用定时器0记录高电平时间、定时器1启动模块。给出实现测距及数码管显示的步骤,并提及完整代码。
开篇先说一句废话····
本旺名字叫萨摩耶,,Please 叫我旺财,,,哈哈,招财进宝嘛!
开篇
本单片机购买的时候带的超声波模块是HC-SR04,根据好多材料都说用这个的原因是便宜,,,不过没关系,刚开始学不在乎,重在学习原理,为了以后的开发增加经验。
超声波模块
**超声波长啥样?**同样,直接上图
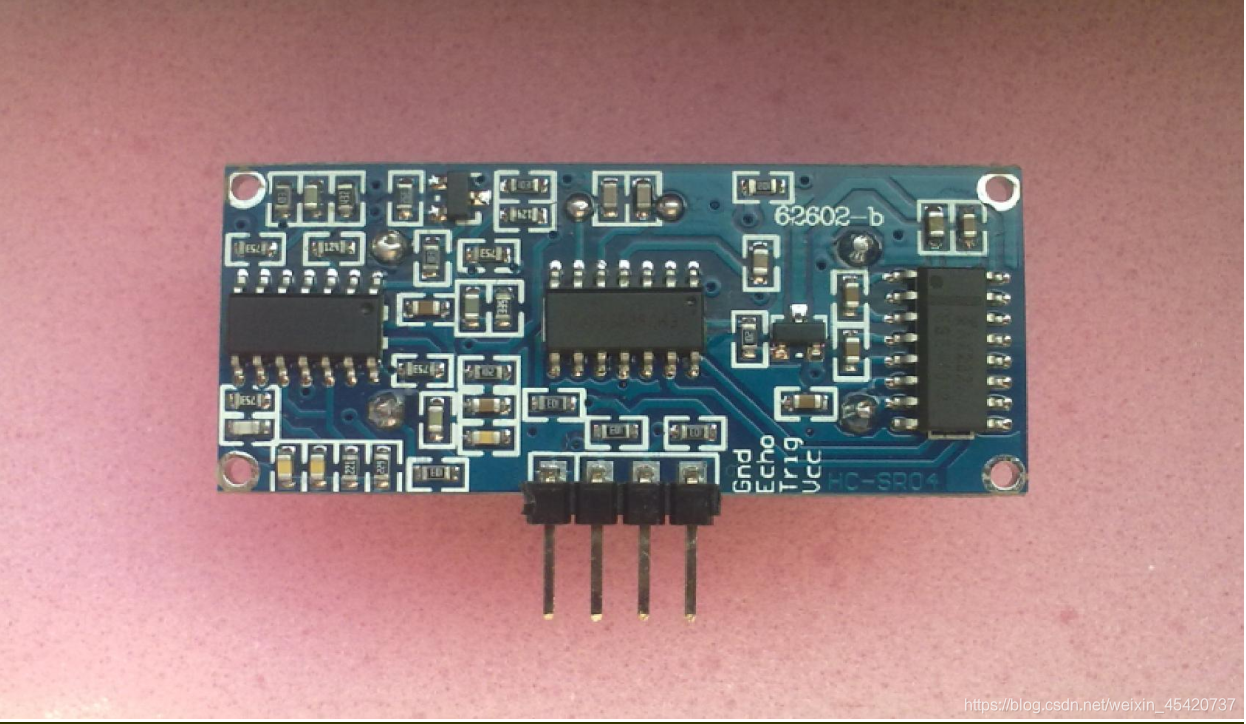
 它有4个接口,VCC,Trig,Echo,GND。VCC和GND用来供电,Trig用来发送一个高电平,Echo用来等待接收Trig发送的高电平。
它有4个接口,VCC,Trig,Echo,GND。VCC和GND用来供电,Trig用来发送一个高电平,Echo用来等待接收Trig发送的高电平。
超声波咋用?
因为它有四个引脚,首先就是要与单片机连接,我这边是VCC和GND正常连接外,Trig连接P2 ^1,Echo连接P2 ^0;连接好就是要开始调试程序。
阅读数据手册,发现引脚说明外还有时序图。直接上图
 除了时序图外,还要注意的就是,因为计算距离S=时间 * 高电平时间 /2,需要记录高电平时间,首先就是定时器0,但是因为要不断测距,不能只发一次,而是要按频率不断的发送信号,来采集时间,所以还要用到一个定时器1来启动超声波模块。
除了时序图外,还要注意的就是,因为计算距离S=时间 * 高电平时间 /2,需要记录高电平时间,首先就是定时器0,但是因为要不断测距,不能只发一次,而是要按频率不断的发送信号,来采集时间,所以还要用到一个定时器1来启动超声波模块。
步骤:
1.初始化两个定时器
//定时器初始化
void TimeInit(){
TMOD=0x11;
TH0=0;
TL0=0;
TH1=0xf8; //2ms
TL1=0x30;
EA=1;
ET1=1;
ET0=1;
TR1=1;
TR0=0;
}
2.定时器0的中断处理,定时器0的作用用来计高电平的时间,所以注意定时器0的溢出,如果溢出要重新归零。
void Time0() interrupt 1{
flag=1;
}
3.定时器1的中断处理,定时器1的功能就是按一定频率启动超声波和显示数码管,
void Time1() interrupt 3{
TH1=0xf8;
TL1=0x30;
Showsmg();
tt++;
if(tt>=100){
tt=0;
Trig=1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
Trig=0;
}
}
4.时间统计出来就要计算距离了,距离有之前的公式,要注意就是如果距离太远或者时间太长导致定时器0溢出,要让数码管提示错误
//计算函数
void count(){
time=TH0*256+TL0;
TH0=0;
TL0=0;
dist=(long)(time*0.17);
if((dist>=4000) || (flag==1)){
flag=0;
DisPlay[0]=0x40;
DisPlay[1]=0x40;
DisPlay[2]=0x40;
DisPlay[3]=0x40;
}
else{
DisPlay[0]=smgduan[dist/1000];
DisPlay[1]=smgduan[dist%1000/100] |0x80; //显示小数点
DisPlay[2]=smgduan[dist%100/10];
DisPlay[3]=smgduan[dist%10];
}
}
5.发现还缺Echo引脚接受数据(主函数)
void main(){
TimeInit();
while(1){
while(!Echo);
TR0=1;
while(Echo);
TR0=0;
count();
}
}
超声波测距–数码管显示(完整代码)
#include "reg52.h"
#include "intrins.h"
#define u8 unsigned char
#define u16 unsigned int
unsigned long dist;
u16 time;
u16 tt,flag;
u8 DisPlay[6];
u8 smgduan[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
sbit Trig=P2^1;
sbit Echo=P2^0;
void Delay(u16 z) //11.0592MHz 1ms
{
u8 i,j;
for(i=z;i>0;i--)
for(j=110;j>0;j--);
}
//数码管显示
void Showsmg(){
u8 i;
for(i=0;i<4;i++)
{
switch(3-i) //位选
{
case 0: LSA=0;LSB=0;LSC=0;break;
case 1: LSA=1;LSB=0;LSC=0;break;
case 2: LSA=0;LSB=1;LSC=0;break;
case 3: LSA=1;LSB=1;LSC=0;break;
case 4: LSA=0;LSB=0;LSC=1;break;
case 5: LSA=1;LSB=0;LSC=1;break;
case 6: LSA=0;LSB=1;LSC=1;break;
case 7: LSA=1;LSB=1;LSC=1;break;
}
P0=DisPlay[i];
Delay(1);
P0=0x00;
}
}
//计算函数
void count(){
time=TH0*256+TL0;
TH0=0;
TL0=0;
dist=(long)(time*0.17);
if((dist>=4000) || (flag==1)){
flag=0;
DisPlay[0]=0x40;
DisPlay[1]=0x40;
DisPlay[2]=0x40;
DisPlay[3]=0x40;
}
else{
DisPlay[0]=smgduan[dist/1000];
DisPlay[1]=smgduan[dist%1000/100] |0x80;
DisPlay[2]=smgduan[dist%100/10];
DisPlay[3]=smgduan[dist%10];
}
}
//定时器初始化
void TimeInit(){
TMOD=0x11;
TH0=0;
TL0=0;
TH1=0xf8; //2ms
TL1=0x30;
EA=1;
ET1=1;
ET0=1;
TR1=1;
TR0=0;
}
void Time0() interrupt 1{
flag=1;
}
void Time1() interrupt 3{
TH1=0xf8;
TL1=0x30;
Showsmg();
tt++;
if(tt>=100){
tt=0;
Trig=1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
Trig=0;
}
}
void main(){
TimeInit();
while(1){
while(!Echo);
TR0=1;
while(Echo);
TR0=0;
count();
}
}

















 4881
4881

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









