







7-6 摄影光学系统
一、概述
一定景深的空间物经过摄影系统成平面像。
三个参数:焦距 f ′ f' f′,相对孔径 D / f ′ D/f' D/f′,视场角2W.
1、焦距:决定像的大小
远处: y ′ = − f ′ t a n W y'=-f'tanW y′=−f′tanW,焦距大则像大。
近处: y ′ = β y = − f x y y'=\beta y=-\frac{f}{x}y y′=βy=−xfy
焦距一般十几毫米~1米以上
照相机一般20mm~几百mm
2、相对孔径D/f’
光照度
E
=
1
4
π
K
L
(
D
f
′
)
2
(
β
p
β
p
−
β
)
2
E=\frac{1}{4}\pi KL(\frac{D}{f'})^2(\frac{\beta_p}{\beta_p-\beta})^2
E=41πKL(f′D)2(βp−ββp)2
光圈数(F数):相对孔径的倒数:f’/D
3、视场角
能够摄入像面的视场角,由像面大小决定
120底片:12张 60×60 16张 60×45
135底片:24×36
其中, 2 y ′ 2y' 2y′为对角线的长度。
要知道视场的大小,就不仅要知道焦距值,还要知道图像传感器感光面的大小,但是数码相机图像传感器大小不一,所以常常给出另外一个焦距值,叫做,相当于135相机焦距值。
焦距、视场角、相对孔径之间有一定的关系:
①f’与2w,由 y ′ = − f ′ t a n W y'=-f'tanW y′=−f′tanW
当y’不变的时候,f’越大,W就越小:特写镜头,远摄镜头,望远镜头。
f’越小,W就越大:全景镜头,广角镜头
②f’与相对孔径的关系
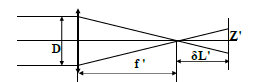
视弥散斑的大小Z’
Z
′
=
(
D
f
′
)
2
δ
L
′
Z'=(\frac{D}{f'})^2\delta L'
Z′=(f′D)2δL′
二、摄影物镜中的光束限制
1、孔阑——特设,一般在镜头内部对称面附近,为可变光阑
光圈数F=f’/D,像面照度 E ∝ ( D f ′ ) 2 E\propto (\frac{D}{f'})^2 E∝(f′D)2,曝光量 Q ∝ ( D f ′ ) 2 t Q\propto (\frac{D}{f'})^2t Q∝(f′D)2t
F数通常以 2 \sqrt 2 2为公比排列,如:2.8,4,5.6,8,11,16,22,32
光圈优先:被摄物是全景还是特写
快门优先:被摄物是否运动
2、视场光阑——图像传感器感光面或者底片框
3、渐晕光阑——透镜框。因孔径、视场都较大,远离孔阑的透镜框必须栏光,否则①透镜口径太大,笨重不便;②轴外宽光束像差影响像质。
常常渐晕50%,有时栏剩下30%
三、摄影物镜的景深和几何焦深
1、景深——当调焦与某一对象时,前后能够成清晰像的空间深度
景深的公式:
Δ
1
=
p
1
−
p
=
p
2
Z
′
z
a
f
′
−
p
Z
′
=
p
2
Z
′
f
′
2
/
F
−
p
Z
′
\Delta_1=p_1-p=\frac{p^2Z'}{zaf'-pZ'}=\frac{p^2Z'}{f'^2/F-pZ'}
Δ1=p1−p=zaf′−pZ′p2Z′=f′2/F−pZ′p2Z′
Δ 2 = p − p 2 = p 2 Z ′ z a f ′ + p Z ′ = p 2 Z ′ f ′ 2 / F + p Z ′ \Delta_2=p-p_2=\frac{p^2Z'}{zaf'+pZ'}=\frac{p^2Z'}{f'^2/F+pZ'} Δ2=p−p2=zaf′+pZ′p2Z′=f′2/F+pZ′p2Z′
物距越大,则景深越大;光圈数F数越大,则景深越大;焦距f’越小,则景深越大。
2、几何焦深——若将景像平面前后移动,弥散斑看起来仍为一个点。这时,景像平面前后移动的范围称为几何焦深。
2 Δ ′ = Z ′ / t a n U ′ 2\Delta'=Z'/tan U' 2Δ′=Z′/tanU′
当光瞳放大率 β p = 1 \beta_p=1 βp=1时, t a n U ′ = 0.5 D ′ l ′ = D 2 l ′ = D 2 f ′ f ′ f ′ + x ′ = 1 2 F ′ 1 1 − β tan U'=\frac{0.5D'}{l'}=\frac{D}{2l'}=\frac{D}{2f'}\frac{f'}{f'+x'}=\frac{1}{2F'}\frac{1}{1-\beta} tanU′=l′0.5D′=2l′D=2f′Df′+x′f′=2F′11−β1
2 Δ ′ = 2 Z ′ F ( 1 − β ) 2\Delta'=2Z'F(1-\beta) 2Δ′=2Z′F(1−β),当 β = 0 \beta=0 β=0时, 2 Δ ′ = 2 Z ′ F 2\Delta'=2Z'F 2Δ′=2Z′F可作为轴向像差的允差。
F越大,越允许调焦不准。
四、摄影物镜的分辨率
由 ϕ = 1.22 λ D \phi=\frac{1.22\lambda}{D} ϕ=D1.22λ,最小分辨距 σ = ϕ f ′ = 1.22 λ D / f ′ \sigma=\phi f'=\frac{1.22\lambda}{D/f'} σ=ϕf′=D/f′1.22λ,这是由相对孔径决定的。
常常用每毫米能够区分的线条数N来表示: N = 1 σ N=\frac{1}{\sigma} N=σ1,对于555nm而言, N = 1475 D f ′ N=1475\frac{D}{f'} N=1475f′D。这是视场中心的分辨率,边缘会有所降低
由于感光乳胶有颗粒,CCD像素有大小,光学系统一般难以设计到衍射极限。
鉴别率板:
目视分辨率 N L N_L NL:用显微镜直接观察图案被物镜所成像
照相分辨率 N P N_P NP:用显微镜观察图案被物镜所摄的底片
若底片分辨率为
N
F
N_F
NF,则有
1
N
P
=
1
N
L
+
1
N
F
\frac{1}{N_P}=\frac{1}{N_L}+\frac{1}{N_F}
NP1=NL1+NF1
根据公式
N
=
1475
D
f
′
N=1475\frac{D}{f'}
N=1475f′D,一般来说照相机的相对孔径比较大(这是为了适应较低的环境照明条件,缩短曝光时间),但是要达到实际的分辨本领,其实并不需要这么大的相对孔径。一般来说,中心的N在60左右。
标准镜头:焦距50mm,F数1.8
比标准镜头焦距小的是短焦距镜头。(正负透镜组合)
长焦距短工作距离
变焦距(至少两个光组动,一个改变焦距,一个用来保持像面位置不变)
不同的焦距,视场范围不一样。
标准镜头可以拍出人眼看起来很自然的照片,而不会在照片上附加任何感觉。
短焦镜头更能营造透视效果。
望远镜头:短焦距望远镜头(人像镜头)70mm-90mm
中等焦距望远镜头微距(可以拍摄昆虫,花等)100mm-135mm
长焦距的望远镜头有一种空间压缩的效果。
快速镜头:曝光时间缩短的镜头50mmF1.4比50mmF1.8
7-7 投影和放映光学系统
放大像的光学系统
光学系统包括1、聚光镜系统 2、放映物镜
透射光照明和漫反射光照明
一、透射照明时屏幕上的照度
设物面上亮度为 L 1 L_1 L1,=,放映物镜透过率为 k 2 k_2 k2,有 E = E 0 c o s 4 W ′ E=E_0 cos^4W' E=E0cos4W′, E 0 = π k 2 L 1 s i n 2 U ′ E_0=\pi k_2L_1sin^2U' E0=πk2L1sin2U′
放映物镜一般成放大像,U’很小,因此 s i n U ′ ≈ t a n U ′ = D 2 l ′ sin U'≈tan U'=\frac{D}{2l'} sinU′≈tanU′=2l′D
于是, E = k 2 L 1 S l ′ 2 c o s 4 W ′ E=\frac{k_2L_1S}{l'^2}cos^4W' E=l′2k2L1Scos4W′,其中 S = π D 2 / 4 S=\pi D^2/4 S=πD2/4.S是成像光束在出瞳上所截的面积。考虑到通常W’很小,要使像面照度均匀,必须使各视场的S相同。
为了使轴外光与轴上光的照度差不多,要求①图片与聚光镜在一起。②光源像与放映物镜重合。
l ′ > > f 2 ′ , ∴ l ′ ≈ x ′ = − β 2 f 2 ′ l^{\prime}>> f_{2}^{\prime}, \therefore l^{\prime} \approx x^{\prime}=-\beta_{2} f_{2}^{\prime} l′>>f2′,∴l′≈x′=−β2f2′
E = π k 1 k 2 L 4 β 2 2 ( D f ′ ) 2 cos 4 W ′ E=\frac{\pi k_{1} k_{2} L}{4 \beta_{2}^{2}}\left(\frac{D}{f^{\prime}}\right)^{2} \cos ^{4} W' E=4β22πk1k2L(f′D)2cos4W′
对于反射放映,除需要用大相对孔径之外,还需要提高光源的功率。
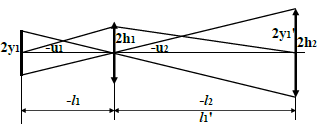
二、放映系统中的聚光镜——要求提供充分、均匀的照明
要求:聚光镜大小 2 h 1 2h_1 2h1≥图片大小 2 y 2 2y_2 2y2
光源像大小
2
y
1
′
2y_1'
2y1′≥放映物镜大小
2
h
2
2h_2
2h2
{
y
1
u
1
=
(
l
1
l
1
′
y
1
′
)
h
1
l
1
=
h
1
y
1
′
l
1
′
≥
h
1
h
2
l
1
′
y
2
u
2
=
y
2
h
2
l
2
≤
h
1
h
2
l
1
′
\left\{\begin{array}{l} y_{1} u_{1}=\left(\frac{l_{1}}{l_{1}^{\prime}} y_{1}^{\prime}\right) \frac{h_{1}}{l_{1}}=\frac{h_{1} y_{1}^{\prime}}{l_{1}^{\prime}} \geq \frac{h_{1} h_{2}}{l_{1}^{\prime}} \\ y_{2} u_{2}=y_{2} \frac{h_{2}}{l_{2}} \leq \frac{h_{1} h_{2}}{l_{1}^{\prime}} \end{array}\right.
{y1u1=(l1′l1y1′)l1h1=l1′h1y1′≥l1′h1h2y2u2=y2l2h2≤l1′h1h2
因此
n
1
y
1
u
1
≥
n
2
y
2
u
2
n_1y_1u_1≥n_2y_2u_2
n1y1u1≥n2y2u2,即
J
1
≥
J
2
J_1≥J_2
J1≥J2
三、放映物镜
孔径大,而2W不太大
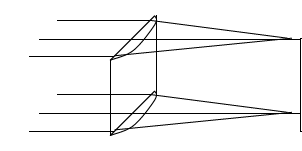
宽银幕镜头——两个垂直方向具有不同倍率,用柱面透镜
单个柱面透镜二方向的像不重合,必须成对使用,组成望远镜系统,这时,一个方向
β
=
−
2
\beta=-2
β=−2,另一个方向相当于平行平板。


















 1572
1572

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









