







 本文介绍了如何在基于OpenCV的项目中,通过编写get_model_matrix和get_projection_matrix函数,实现三维空间中绕z轴旋转的模型矩阵以及根据给定参数计算透视投影矩阵的过程,目标是将三角形变换到屏幕坐标并绘制出来。
本文介绍了如何在基于OpenCV的项目中,通过编写get_model_matrix和get_projection_matrix函数,实现三维空间中绕z轴旋转的模型矩阵以及根据给定参数计算透视投影矩阵的过程,目标是将三角形变换到屏幕坐标并绘制出来。
环境配置:
在作业0的基础上新增了opencv库。
作业描述:
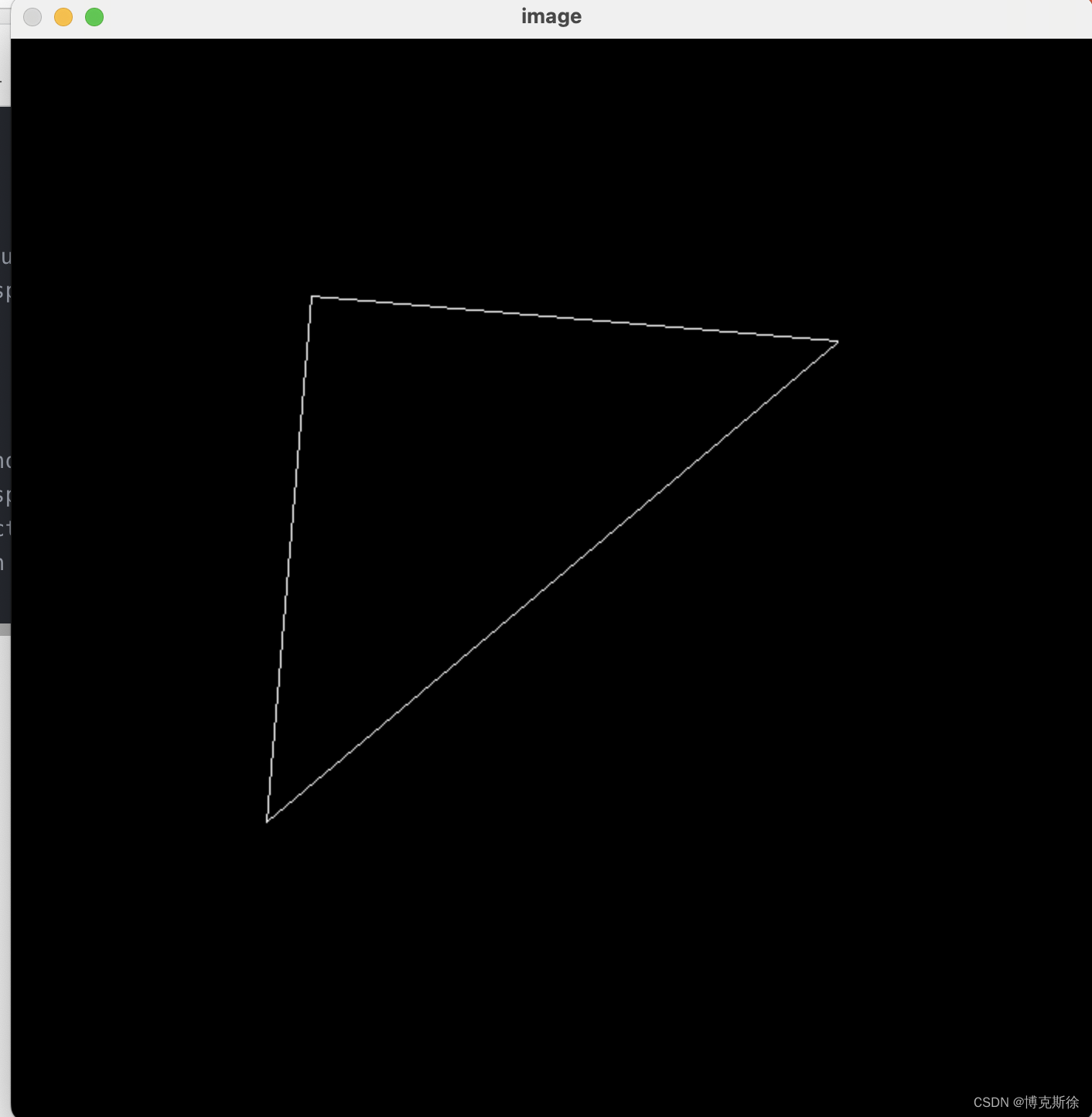
本次作业的任务是填写一个旋转矩阵和一个透视投影矩阵。给定三维下三个 点 v0(2.0,0.0,−2.0),v1(0.0,2.0,−2.0),v2(−2.0,0.0,−2.0), 你需要将这三个点的坐 标变换为屏幕坐标并在屏幕上绘制出对应的线框三角形 (在代码框架中,我们已 经提供了 draw_triangle 函数,所以你只需要去构建变换矩阵即可)。简而言之, 我们需要进行模型、视图、投影、视口等变换来将三角形显示在屏幕上。在提供 的代码框架中,我们留下了模型变换和投影变换的部分给你去完成。
代码:
- 实现三维中绕 z 轴旋转的变换矩阵
Eigen::Matrix4f get_model_matrix(float rotation_angle)
{
Eigen::Matrix4f model = Eigen::Matrix4f::Identity();
// TODO: Implement this function
// Create the model matrix for rotating the triangle around the Z axis.
// Then return it.
double theta = rotation_angle / 180.0 * MY_PI;
Eigen::Matrix4f rotate;
rotate << cos(theta), -sin(theta), 0, 0,
sin(theta), cos(theta), 0, 0,
0,0,1,0,
0,0,0,1;
model = rotate * model;
return model;
}
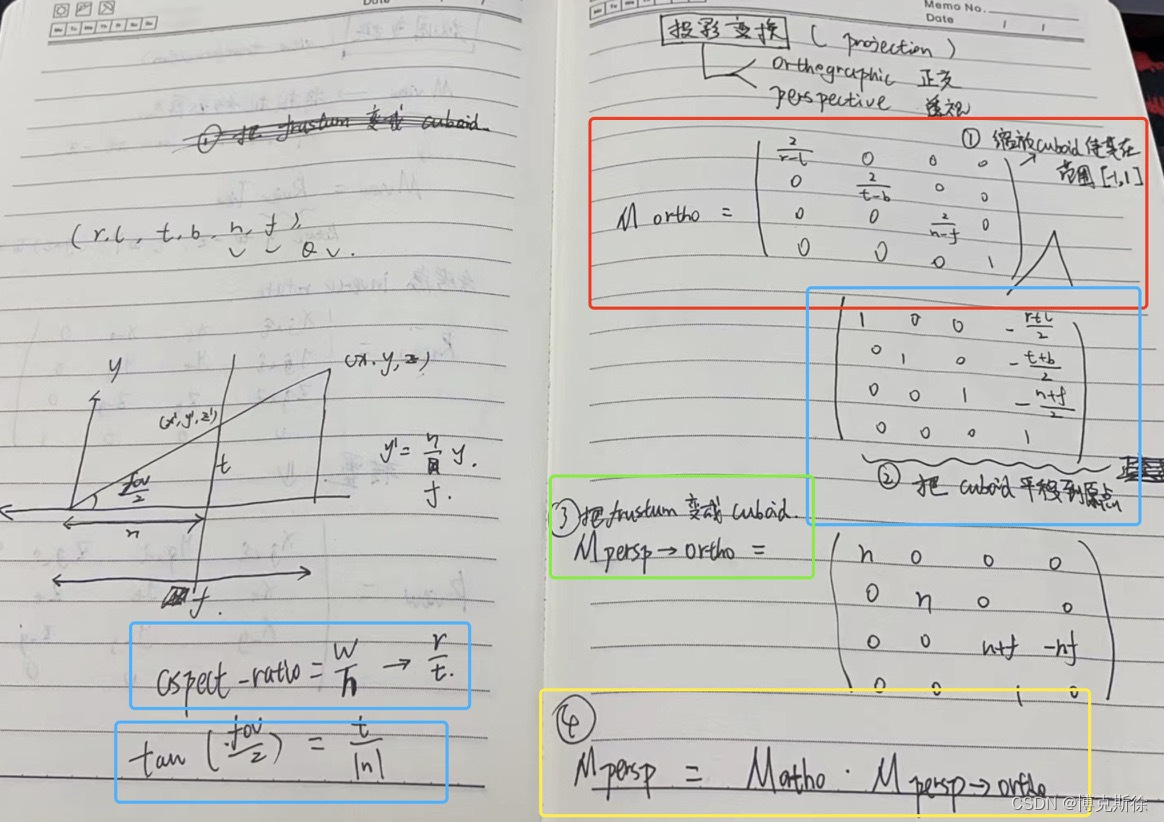
2.构建透视投影矩阵:已知n,f,fov,aspect_ratio,计算r, f, t, d。
然后计算M_scale,M_transf, M_ortho, M_persp_to_ortho, M_persp
Eigen::Matrix4f get_projection_matrix(float eye_fov, float aspect_ratio,
float zNear, float zFar)
{
// Students will implement this function
Eigen::Matrix4f projection = Eigen::Matrix4f::Identity();
// TODO: Implement this function
// Create the projection matrix for the given parameters.
// Then return it.
float radian = (eye_fov/2.0) / 180.0 * MY_PI;
float t = tan(radian) * zNear;
float b = -t;
float r = t * aspect_ratio;
float l = -r;
Eigen::Matrix4f M_scale,M_transf, M_ortho, M_persp_to_ortho, M_persp;
//把cuboid平移到原点
M_scale << 1,0,0,-(r+l)/2,
0,1,0,-(t+b)/2,
0,0,1,-(zNear+zFar)/2,
0,0,0,1;
//缩放 cuboid 使其在范围 [-1, 1]
M_transf << 2/(r-l),0,0,0,
0,2/(t-b),0,0,
0,0,2/(zNear-zFar),0,
0,0,0,1;
//把frustum变成cuboid
M_persp_to_ortho << zNear,0,0,0,
0,zNear,0,0,
0,0,zNear+zFar,-zNear*zFar,
0,0,1,0;
M_ortho = M_scale * M_transf;
M_persp = M_ortho * M_persp_to_ortho;
projection = M_persp * projection;
return projection;
}
结果


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









