




 本文介绍了如何利用Arduino控制板配合Mixly软件,通过超声波HC-SR04传感器和无源蜂鸣器创建一个距离报警系统。当物体距离传感器小于5cm时,蜂鸣器会报警3次。详细步骤包括Mixly的下载安装、硬件连接以及相关学习资源的提供。
本文介绍了如何利用Arduino控制板配合Mixly软件,通过超声波HC-SR04传感器和无源蜂鸣器创建一个距离报警系统。当物体距离传感器小于5cm时,蜂鸣器会报警3次。详细步骤包括Mixly的下载安装、硬件连接以及相关学习资源的提供。
1.下载安装Mixly
http://mixly.org/bnu-maker/mixly-arduino-win
http://www.yfrobot.com/thread-12034-1-1.html
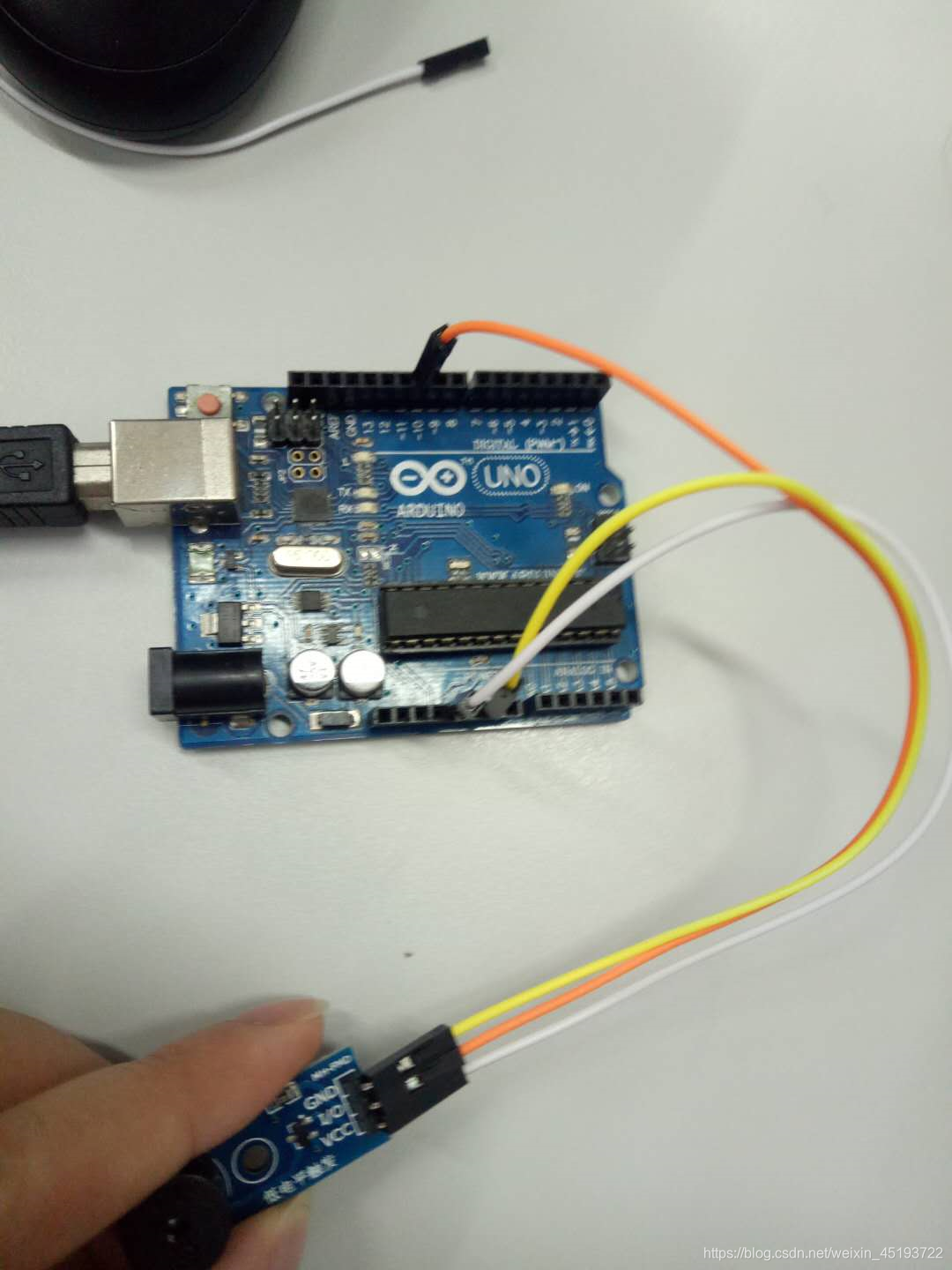
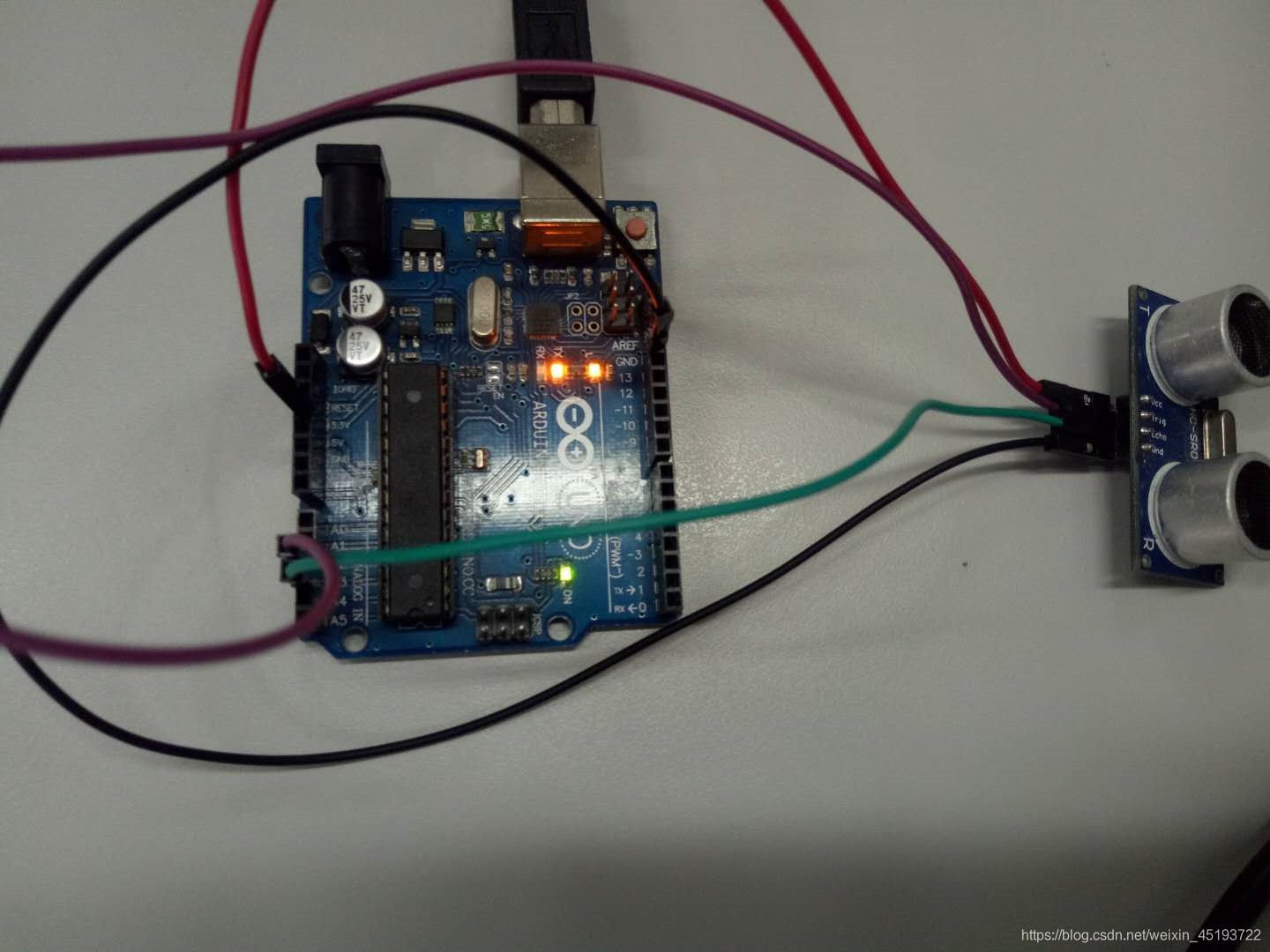
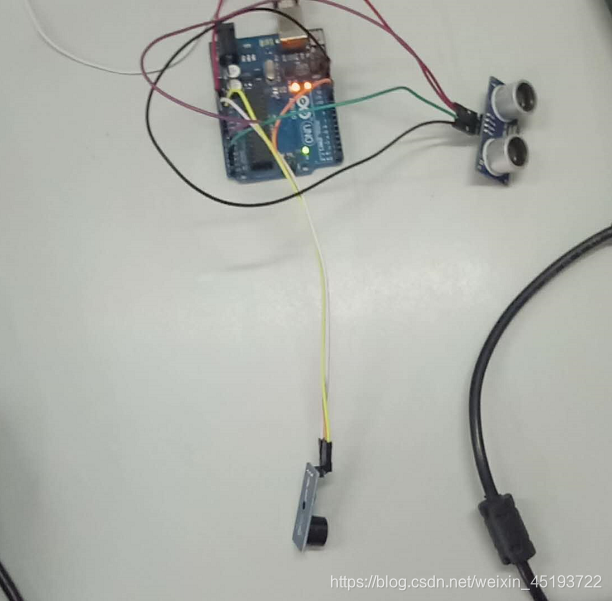
2.硬件准备:arduino控制板、USB 数据线、无源蜂鸣器低电平触发MH-FMD、连接线*7、超声波HC-SR04
3.硬件连接:
蜂鸣器的连接:
超声波的连接:
4.Mixly模块:
1.下载安装Mixly
http://mixly.org/bnu-maker/mixly-arduino-win
http://www.yfrobot.com/thread-12034-1-1.html
2.硬件准备:arduino控制板、USB 数据线、无源蜂鸣器低电平触发MH-FMD、连接线*7、超声波HC-SR04
3.硬件连接:
蜂鸣器的连接:
超声波的连接:
4.Mixly模块:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3万+
3万+





