



参考链接
一、深度学习
面经汇总
1、优化算法
1.1梯度下降算法推导
1.2 EMA算法(指数移动平均)
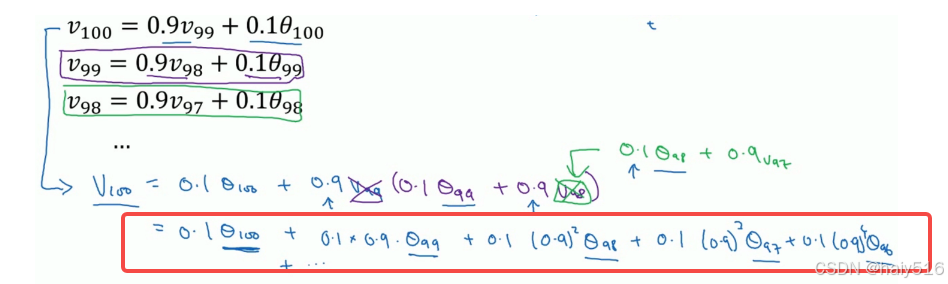
(1)概念:类似于加权平均,只不过权重右后往前进行指数衰减;
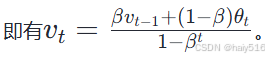
(2)计算:以计算平均温度为例,计算前t天的温度,可以由前(t-1)天的平均值和第t天的温度计算得到;
(3)优点:通过递推公式进行计算,只需要保存当前数据和之前的平均数,适合于深度学习的大规模数据处理。
(4)偏差修正:当默认v0 = 0时,会导致初始vt不够准确,因此可以通过除以(1-βt)进行修正,当t很大时,1-βt ≈ 1 ,即基本不再进行修正

1.3 Momentum(动量梯度下降)
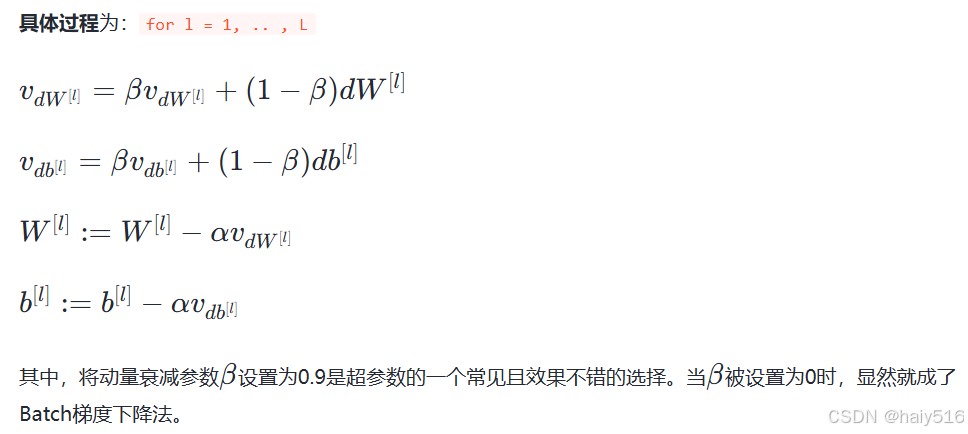
(1)概念:在每次迭代过程中,计算梯度的指数加权平均数,并使用该值进行更新权重W和b
(2)作用:使用之前的梯度进行更新参数,可以加快收敛速度
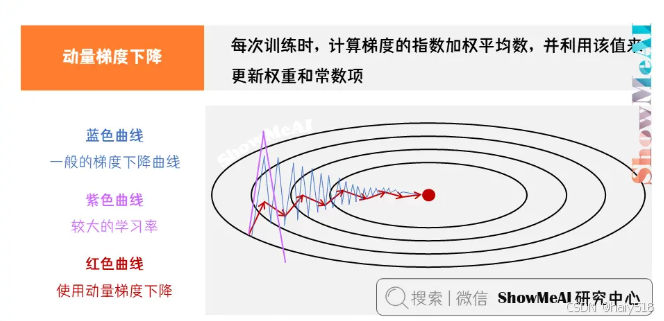
(3)理解:比如在某一个维度dw方向不同,波动较大,通过计算指数加权平均,可以进行正负抵消,较少波动;而对于某一维度,dw的方向相同,通过计算指数加权平均,可以进行梯度叠加,加快参数更新减小收敛过程中的波动后,便可使用较大的学习率进行更新参数,加快训练过程。
实现过程如下:
可视化效果对比:
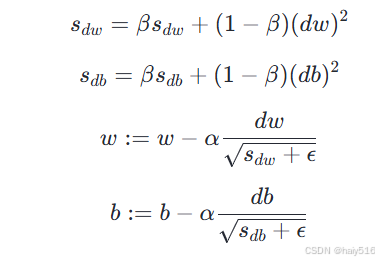
1.4 RMSProp算法(均方根传播)
(1)概念:修改指数加权平均的计算公式,引入平方和开方。公式如下:
(2)作用:减小某些维度的波动,加快收敛速度
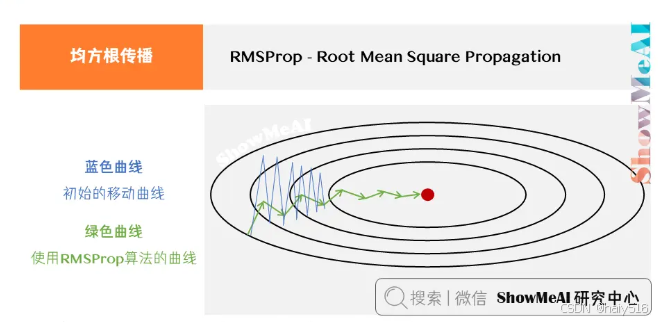
理解:
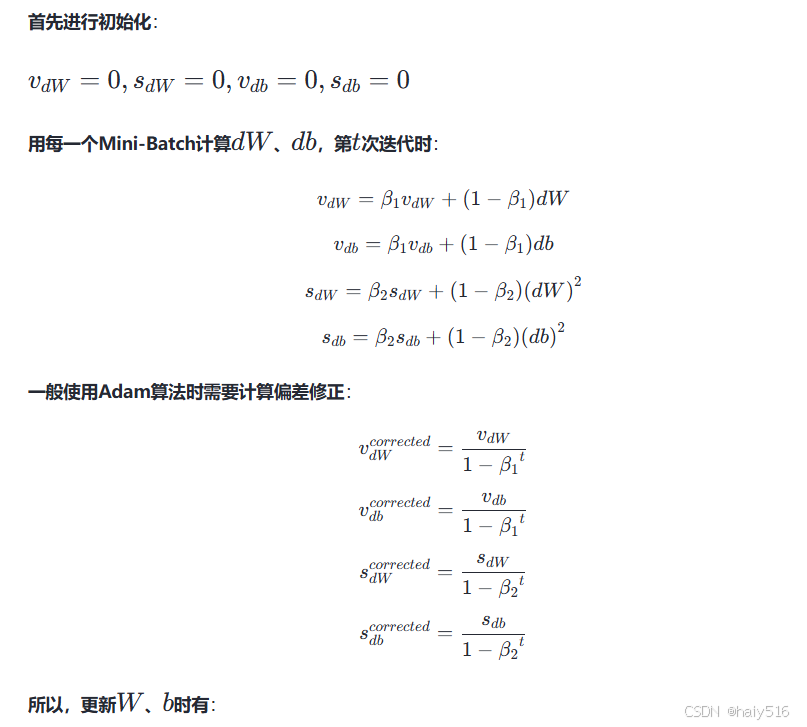
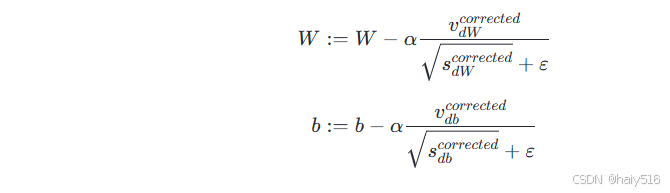
1.4 Adam 优化算法
概念:将Momentum算法和RMSProp进行结合
2、经典神经网络
2.1 ResNet
Resnet是为了解决网络退化问题(即随着网络深度的增加,网络效果反而变差),采样残差结构,以此来加深网络的深度。
3、模型调优
3.1 正则化
3.1.1 正则化缓解过拟合原因
原因:
理解一:缓解过拟合的原理是让模型尽可能简单,也就是让模型的参数尽可能小,甚至为0,而正则化通过对模型权重添加惩罚项,可以时权重变小,L1正则化可以使很多参数为0,因此模型变得更加简单,不容易产生过拟合;
理解二:通过添加正则项,使得参数变小,进而模型得到的输出z值也会变小,对于一些激活函数,如tanh激活函数,在原点附近,激活函数近似为线性激活,因此对于整个网络,更加近似为线性映射,模型也更加简单。
3.1.2 L1正则化
(1)表达式:损失函数中添加权重的L1范数,即各个权重绝对值之和,L1正则化可以产生稀疏解,可以进行特征选择。
(2)产生稀疏解的原因:
理解一:L1正则化对每一个参数,添加相等程度的惩罚,这会导致较小的参数更加趋向于0,导致产生稀疏解;
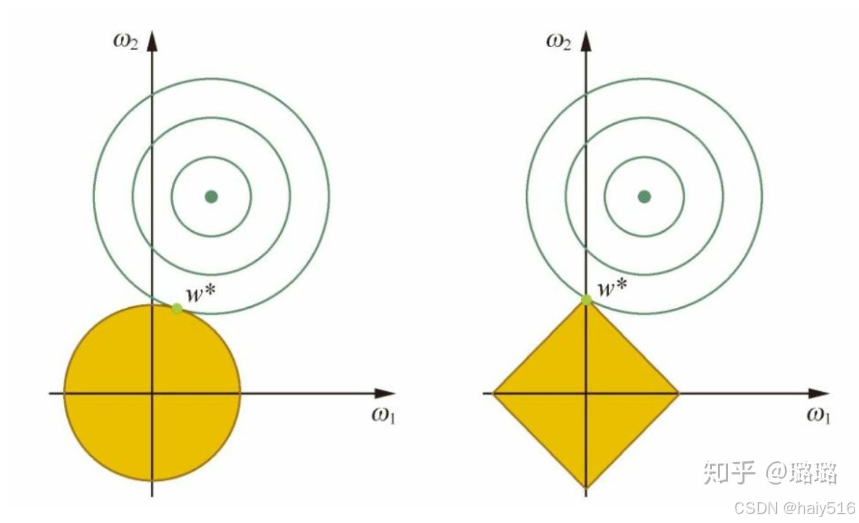
理解二:添加L1正则化后的最优化问题,可以等价于带有条件约束的最优化问题(因为带有约束条件的最优化问题,通过构造拉格朗日函数后解空间与原问题相同)。从解的可行域来看,L1的正则项函数解的可行域具有更多棱角,更容易与损失函数解的可行域在坐标轴产生交点,从而产生更多的稀疏解。
3.1.2 L2正则化
(1)表达式:损失函数中添加权重L2范数的平方,即各个权重平方之和
3.2 Dropout
(1)概念:在进行训练时,随机将某些神经元删除,以此训练一个更小的神经网络;
(2)操作:以反向随机失活 (Inverted Dropout)为例:
keep_prob = 0.8 # 设置神经元保留概率
dl = np.random.rand (al.shape[0], al.shape[1]) < keep_prob #产生一个mask
al = np.multiply (al, dl) #使用mask对al进行删除
al /= keep_prob #为了保持al的期望,这样在进行推理时,就不需要进行dropout操作
(3)缓解过拟合理解:
理解一:对于整个网络来说,dropout后,每次训练时,相当于训练一个小的网络,网络结构更加简单;
理解二:对于单个神经元,该神经元的输入,在每次进行训练时,某些输入会被随机删除,
因此,对于每一个输入,都会倾向于给予一个更小的权重。这样整个网络的权重就会更小,
得到类似于正则化的效果。
(4)keep_prob 参数设置:参数量多的层,更加容易出现过拟合,设置更小的keep_prob
(5)缺点:损失函数无法被明确定义,因为每次迭代时都会删除一些神经元的影响,无法保证损失收敛;
因此,在使用dropout之前,先确定一下模型的损失是否正常收敛。
3.3 Batch Normalization
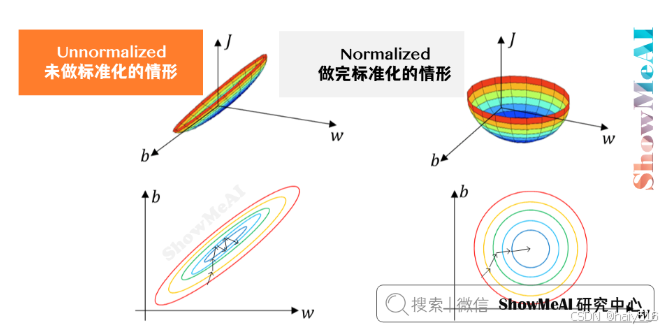
3.3.1 标准化输入
(1)概念:对输入进行归一化处理,即先计算输入数据的均值和标准差,
将输入数据减去均值,再除以标准差
(2)作用:加快模型收敛速度,减少随机初始化对训练过程的影响。
(3)理解:
归一化输入后,可以将数据范围统一到相同的尺度,避免了数据在不同维度下差异较大的问题,
有利于梯度下降算法的进行,且较小了随机初始化对训练的影响
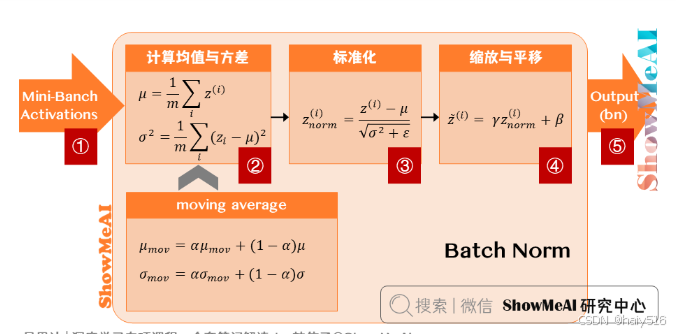
3.3.2 BN层-训练过程
(1)概念:对每一个隐藏层的z值(激活函数之前),进行标准化处理,以此加快网络训练速度,
类似于标准化输入
(2)作用:加快模型训练速度(原因见标准化输入);一定的正则化作用,理解:
BN层是使用一个batch数据计算的均值和方差,因此具有一定噪声,这种噪声会起到类似dropout的作用;
(3)具体实现:
a) 均值/方差的计算:是以通道为单位进行计算的,
就是在一个批次内,将每个通道中的数字单独加起来,再除以NHW,其中N是batchsize,W,H为尺寸大小,
计算得到的均值和方差维度等于通道数
b) 可训练参数γ、β:对归一化的数据进行平移和缩放变换,维度也等于通道数,
网络的每一层都有该层对应的γ、β,维度等于该层的通道数
c) 在训练时,通过EMA算法计算γ、β的指数加权平均数,作为测试时的均值和方差。
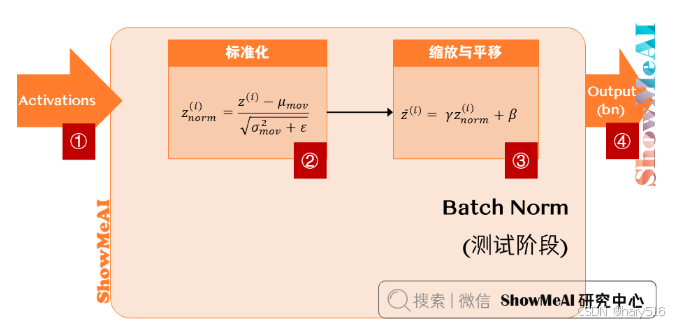
3.3.3 BN层-测试过程
使用训练时计算的γ、β的指数加权平均数,进行归一化处理。
原因:训练时计算的是一个batchsize数据的均值和方差,在测试时通常是对单个样本进行处理,而计算单个样本的均值和方差没有意义。
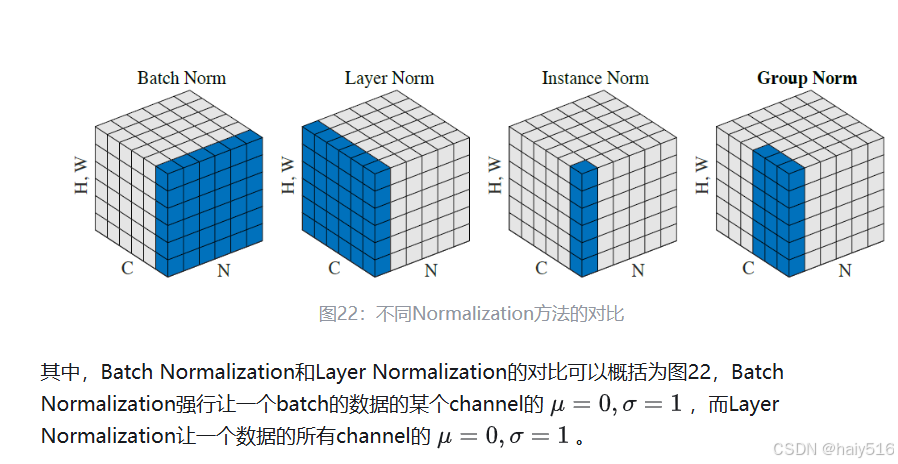
3.3.4 Batch Normalization和Layer Normalization
4、损失函数
4.1 iou损失函数
Smooth L1 Loss-> IoU Loss(2016)-> GIoU Loss(2019)-> DIoU Loss(2020)->CIoU Loss(2020)
1、iou loss问题:
(1)无法处理框不想交的情况(iou=0)
(2)当iou相同时,无法进行区分好坏
2、Ciou Loss
(1)计算iou时,需要考虑三个方面,分别是重叠面积、中心距离、宽高比,Ciou Loss将其全部进行考虑
二、目标检测
目标检测面经
1、2D目标检测
1.1 YOLO目标检测算法
1.1.1YOLO-v1
参考链接
(1)网络结构:借鉴GoogleNet,24个卷积网络+两个全连接层
(2)预测阶段:输入448448,输出7730, 30=20cats+52(x,y,w,h,c)*2
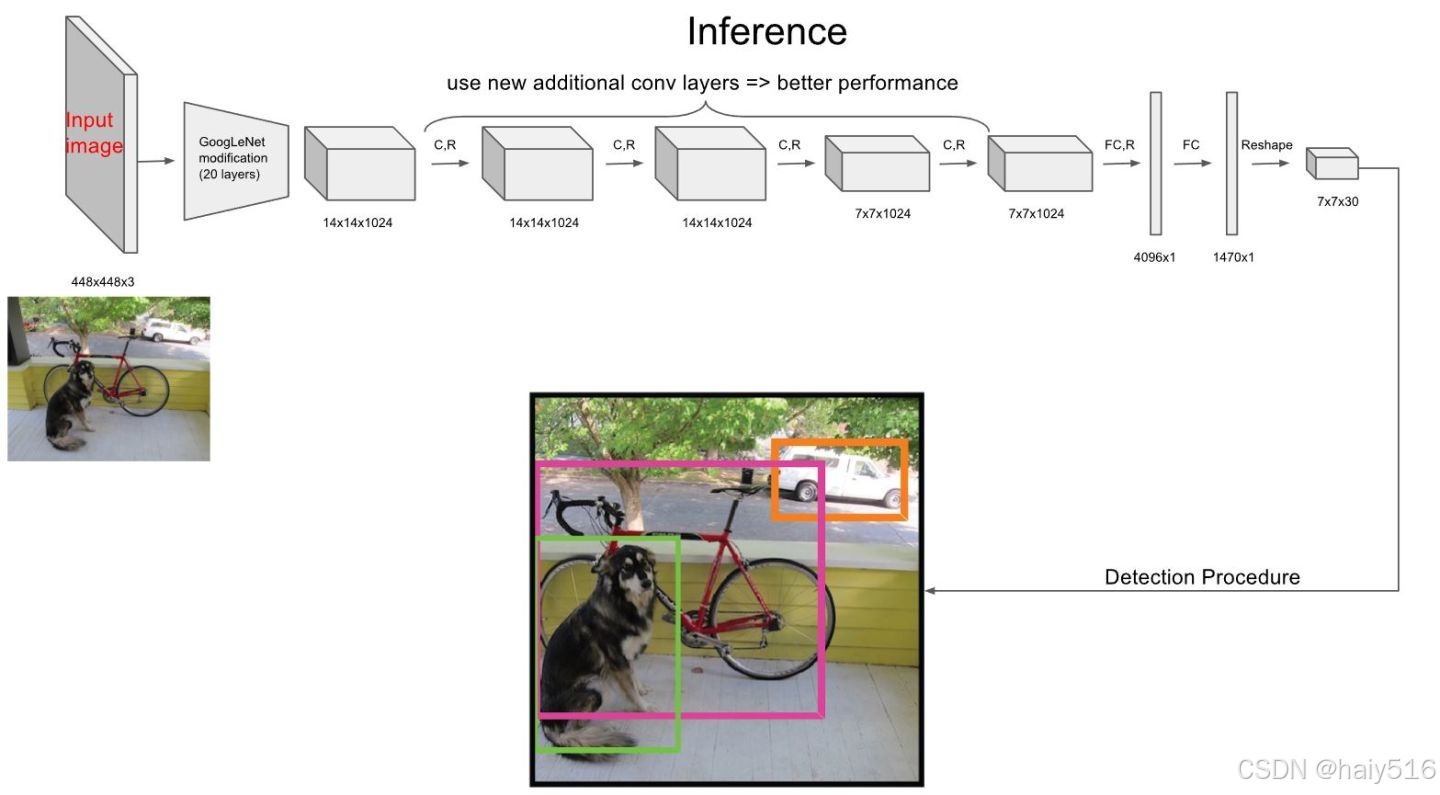
(3)训练阶段:
- 模型输出为7730,训练时根据模型结果与gt,得到7730个gt,再进行损失计算
- 一个grid cell会得到2个预测框,选取与gt框最大的作为正例,另一个作为负例
- x,y,w,h是相对值,范围0-1,其中,x,y坐标是基于每个grid cell的相对坐标,w,h是相对于原图的比例
- 损失函数
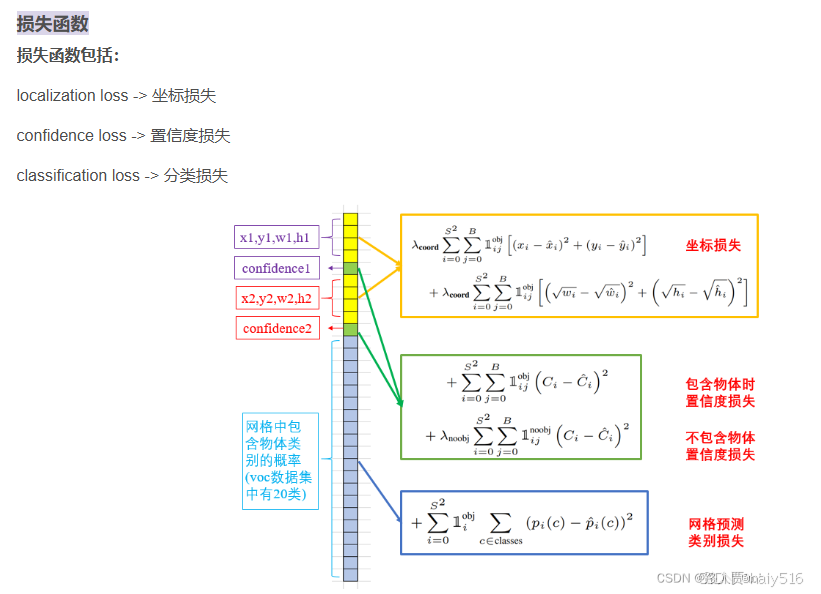
(4)不足:一个grid cell只能预测一个目标,所以容易出现漏检
1.1.5YOLO-x
标签匹配:
1、初步筛选:
1.1 在所有预测结果中,选出中心点位于gt内部的所有结果
1.2 在所有预测结果中,选出中心点位于gt中心点附近的所有结果。gt中心点附近是指以gt中心点为中心,边长为stride2.52的正方形内。
2、SimOTA
2.1 提取初步筛选出的所有样本
2.2 计算loss与cost
2.3 simOTA求解
2.3.1 选出与每个gtiou最大的10个框,根据iou值求和再clamp,得到该gt要分配的预测框个数
2.3.2 根据cost,将cost低的分配给每个gt,一个gt可能得到多个预测结果
2.3.3 进行去重,排除一个预测结果匹配多个gt
深入浅出Yolo系列之Yolox核心基础完整讲解
1.2 CenterNet
经典的目标检测算法:CenterNet
睿智的目标检测46——Pytorch搭建自己的Centernet目标检测平台
1.2.1介绍
1、基于CornerNet进行的优化,将角点预测改为中心点预测;
CornerNet缺点:
(1)目标框的角点一般都落在语义信息之外,不利于学习,而中心点都位于语义信息之内;
(2)CornerNet需要对角点(左上角右下角)进行配对,降低了算法的性能和效率。
2、省去了anchor机制,提升检测速度;
3、直接在heatmap上面执行了maxpooling操作,在理论上去掉了耗时的NMS后处理操作。
1.2.2原理
1.3 FCOS
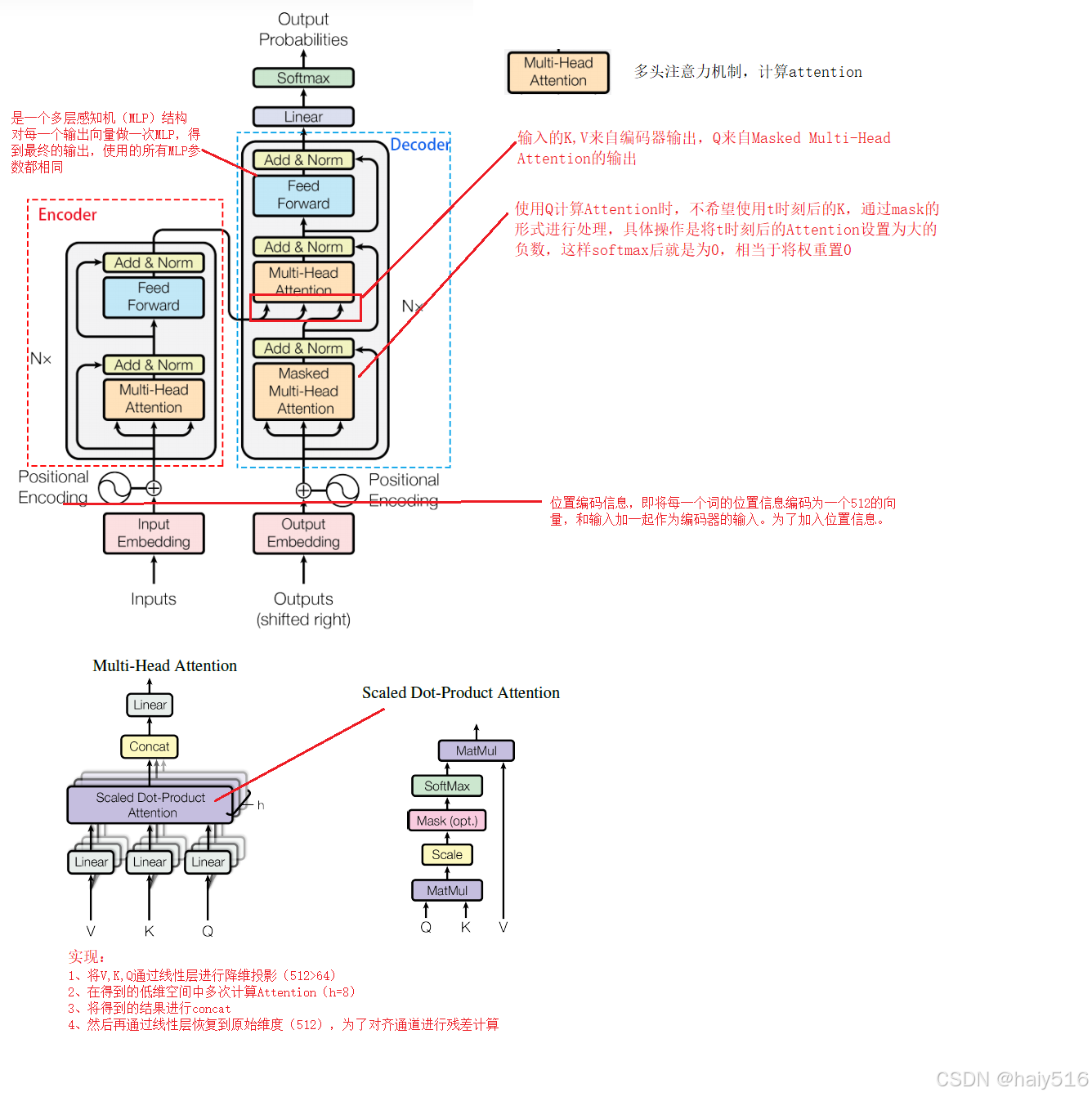
1.4 Transformer
参考链接.
1.4.1 self-Attention
1、input = I(embedding)
2、Q = I * Wq; K = I * Wk; V = I * Wv
s
e
l
f
A
t
t
e
n
t
i
o
n
=
s
o
f
t
m
a
x
(
Q
∙
K
T
d
)
∙
V
selfAttention = softmax(\frac{Q\bullet {K}^T }{\sqrt{d} } )\bullet V
selfAttention=softmax(dQ∙KT)∙V
其中:
Q
∙
K
T
表示不同输入向量之间的相关性
Q\bullet {K}^T 表示不同输入向量之间的相关性
Q∙KT表示不同输入向量之间的相关性
s
o
f
t
m
a
x
(
Q
∙
K
T
d
)
∙
V
相当于加权求和,即给每一个输入向量添加一个权重
softmax(\frac{Q\bullet {K}^T }{\sqrt{d} } )\bullet V相当于加权求和,即给每一个输入向量添加一个权重
softmax(dQ∙KT)∙V相当于加权求和,即给每一个输入向量添加一个权重
注:除以根号d的作用:如果当d比较大时 Q与K计算出来的attention值差异比较大时,softmax函数输出会比较陡峭,会导致梯度较小,难以训练,因此做一个平滑处理,使得softmax函数的结果更加平滑。
1.4.2 transformer结构
2、3D目标检测
3、轻量化backbone
3.1 mobileNet
参考链接
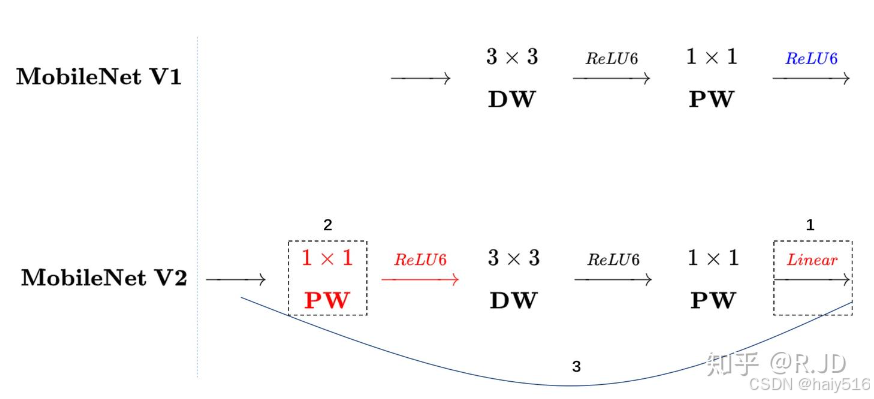
(1)mobileNet-v1
概念: 把VGG中的标准卷积层换成深度可分离卷积+1x1卷积
作用:通过深度可分离卷积可以极大减少参数量和计算量(约1/9)
使用relu6激活函数:将输出限定在6以下,适应低浮点数的表示精度(即低浮点数不能表示太大的数)
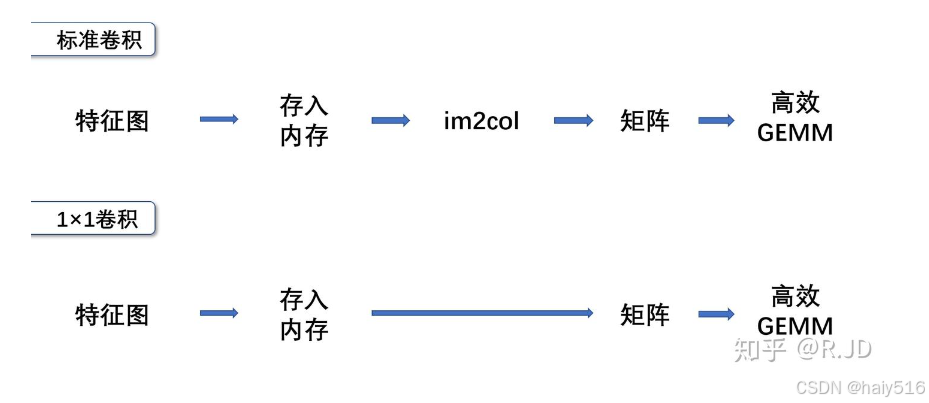
性能优化原理:结构中95%的计算量来自1x1卷积,而1x1卷积容易优化。
(2)mobileNet-v2
a) 先使用1x1卷积升维,再进行深度可分离卷积,再使用1x1卷积降维
b) 降维卷积后加线性激活函数,为了解决v1版本中深度可分离卷积训练后大部分卷积核参数都是0的问题
c) 添加残差结构
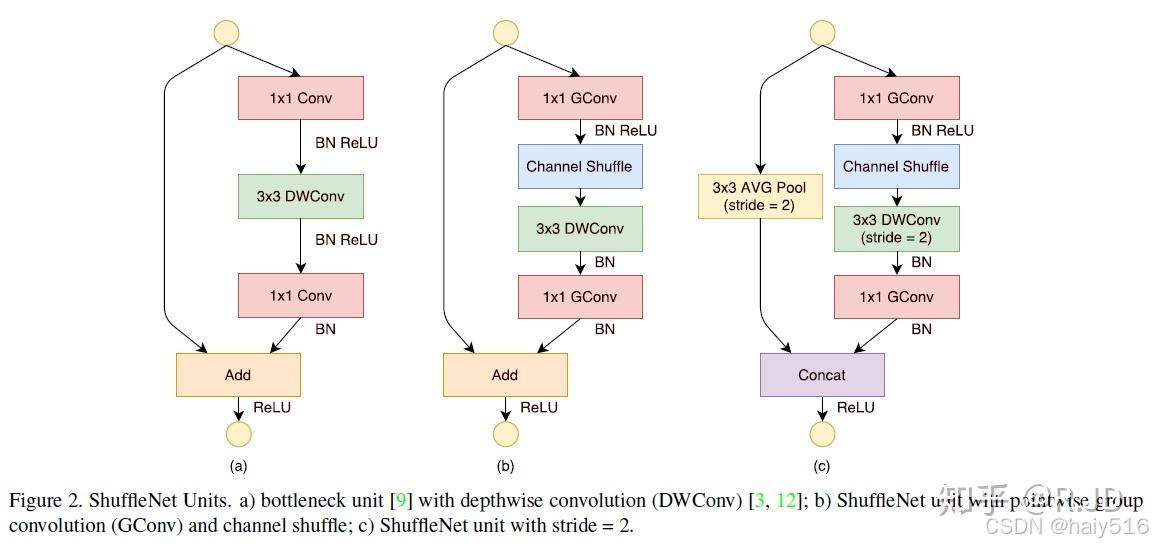
3.2 shuffleNet
参考链接
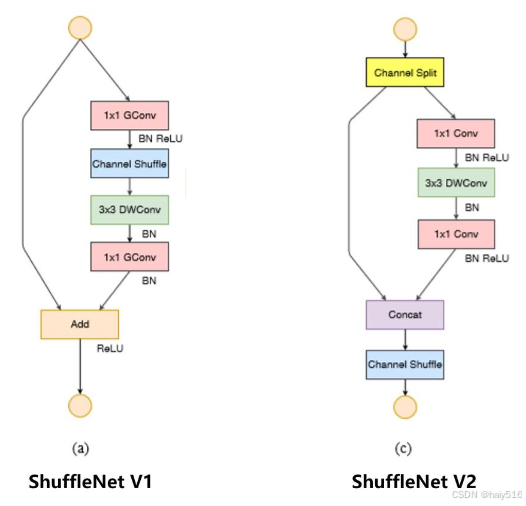
(1)shuffleNet-v1:在ResNet基础上进行改进,改进点为:
a) 将1x1卷积改为1x1分组卷积,减少1x1卷积的参数量和计算量
b) 将3x3卷积改为3x3深度可分离卷积,参考mobileNet
c) 1x1分组卷积后添加channel shuffle层,进行通道重排
(2)shuffleNet-v2:通过提出的四个网络设计原则,对v1进行优化
a) 卷积层使用相同的输入输出通道数。
b) 注意到使用大的分组数所带来的坏处。
c) 减少分支以及所包含的基本单元。
d) 减少Element-wise操作。
优化点:
使用channel split,保证输入输出通道相同
1x1卷积不采用分组卷积
进入残差时使用concat取代add
3.3 efficientNet
4、模型优化
4.1、2D检测优化
4.1.1、正负样本匹配与样本均衡
(1)常见检测算法正负样本匹配策略总结
(2)目标检测核心之正负样本匹配与均衡问题
4.1.2、特征融合
(1)BiFPN
4.1.3、损失函数
4.1.4、主干使用elan结构(yolov7),elan结构
4.2、3D检测优化
4.3、知识蒸馏
概述:主要进行模型轻量化压缩,模型压缩方式总结:
1、压缩已训练好的模型:知识蒸馏、权值量化、权重剪枝、通道剪枝、注意力迁移
2、直接训练轻量化网络:SqueezeNet、MobileNetv1v2v3、MnasNet、SHhffleNet、Xception、EfficientNet、 EfficieentDet
3、加速卷积运算:im2col+GEMM、Wiongrad、低秩分解
4、硬件部署:TensorRT、Jetson、TensorFlow-Slim、openvino、FPGA集成电路
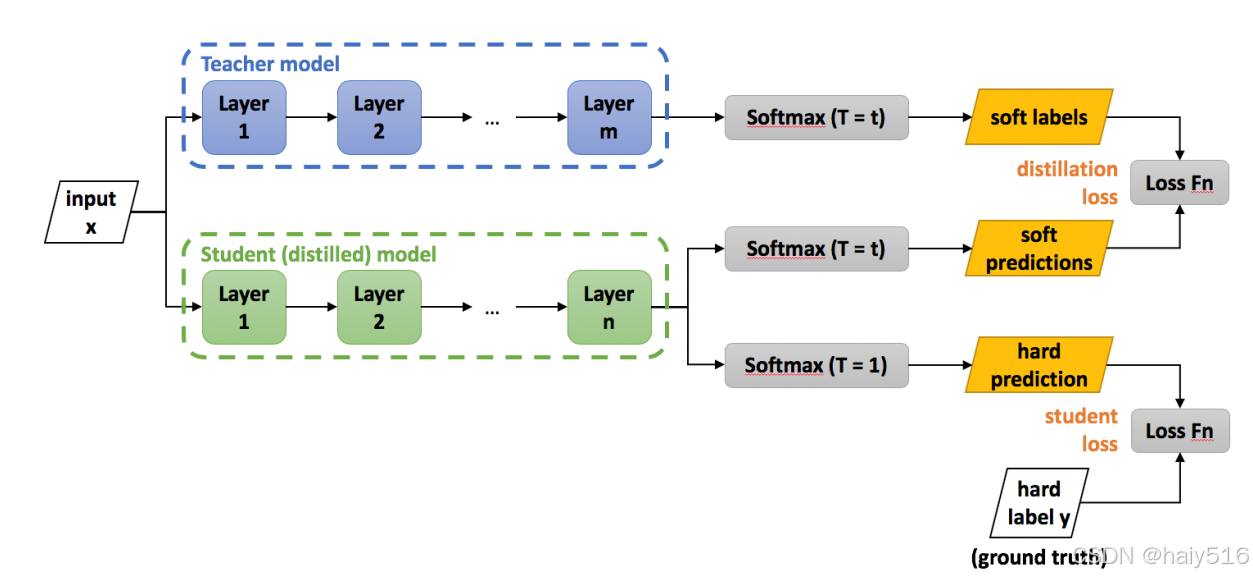
4.3.1、Logits蒸馏(目标蒸馏)
参考链接
(1)直接对分类模型的输出概率分布进行学习
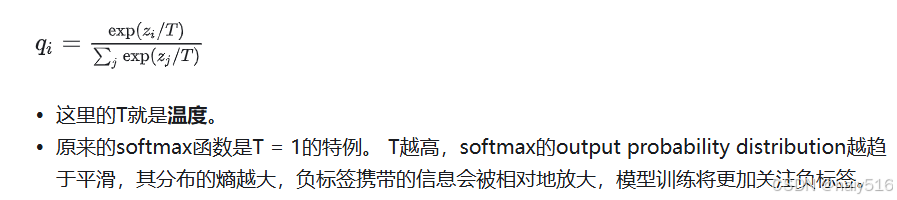
(2)使用温度系数T来控制soft label的分布,学生模型较小,一般采用较低的温度系数,因为参数量小的模型不适合学习太复杂的知识
4.3.2、特征蒸馏
它不像Logits方法那样,Student只学习Teacher的Logits这种结果知识,而是学习Teacher网络结构中的中间层特征。它强迫Student某些中间层的网络响应,要去逼近Teacher对应的中间层的网络响应。这种情况下,Teacher中间特征层的响应,就是传递给Student的知识,本质是Teacher将特征级知识迁移给Student。
4.3.3、定位蒸馏(目标检测)
5、MMdetection
5.1 MMDetection框架入门教程
三、Python
python面经
3.1
四、code
4.1 向量化实现iou
def calculate_iou_multiple(boxes_a, boxes_b):
# boxes_a 和 boxes_b 是形状为 (N, 4) 的数组
x1_inter = np.maximum(boxes_a[:, 0, np.newaxis], boxes_b[:, 0])
y1_inter = np.maximum(boxes_a[:, 1, np.newaxis], boxes_b[:, 1])
x2_inter = np.minimum(boxes_a[:, 2, np.newaxis], boxes_b[:, 2])
y2_inter = np.minimum(boxes_a[:, 3, np.newaxis], boxes_b[:, 3])
inter_width = np.maximum(0, x2_inter - x1_inter)
inter_height = np.maximum(0, y2_inter - y1_inter)
inter_area = inter_width * inter_height
area_a = (boxes_a[:, 2] - boxes_a[:, 0]) * (boxes_a[:, 3] - boxes_a[:, 1])
area_b = (boxes_b[:, 2] - boxes_b[:, 0]) * (boxes_b[:, 3] - boxes_b[:, 1])
union_area = area_a[:, np.newaxis] + area_b - inter_area
iou = inter_area / union_area
return iou
4.2 nms
def calculate_iou(box_a, box_b):
# 计算交集的左上角和右下角
x1_inter = np.maximum(box_a[0], box_b[0])
y1_inter = np.maximum(box_a[1], box_b[1])
x2_inter = np.minimum(box_a[2], box_b[2])
y2_inter = np.minimum(box_a[3], box_b[3])
# 计算交集的面积
inter_width = np.maximum(0, x2_inter - x1_inter)
inter_height = np.maximum(0, y2_inter - y1_inter)
inter_area = inter_width * inter_height
# 计算两个框的面积
area_a = (box_a[2] - box_a[0]) * (box_a[3] - box_a[1])
area_b = (box_b[2] - box_b[0]) * (box_b[3] - box_b[1])
# 计算并集的面积
union_area = area_a + area_b - inter_area
# 计算 IoU
iou = inter_area / union_area
return iou
def nms(boxes, scores, iou_threshold=0.5):
# 按得分从高到低排序
indices = np.argsort(scores)[::-1]
selected_indices = []
while len(indices) > 0:
# 选择得分最高的框
current_index = indices[0]
selected_indices.append(current_index)
# 计算与当前框的 IoU
current_box = boxes[current_index]
remaining_boxes = boxes[indices[1:]]
ious = np.array([calculate_iou(current_box, box) for box in remaining_boxes])
# 只保留 IoU 小于阈值的框
indices = indices[np.where(ious <= iou_threshold)[0] + 1]
return selected_indices


















 558
558

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









