




 本文指导读者解决在Ubuntu上遇到的sudorosdepinit与rosdepupdate报错问题,包括下载rosdistro源代码、修改关键文件URL,确保正确配置ros依赖。
本文指导读者解决在Ubuntu上遇到的sudorosdepinit与rosdepupdate报错问题,包括下载rosdistro源代码、修改关键文件URL,确保正确配置ros依赖。
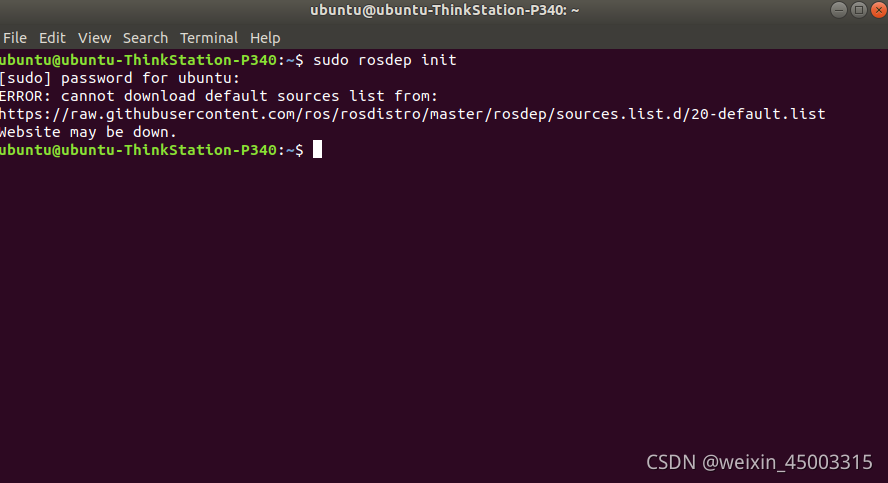
解决sudo rosdep init 与rosdep update报错问题
具体报错信息如下:
方法一
遇到该问题可参考:https://www.guyuehome.com/12640
方法二
若是该文章的解决方法依旧不能解决问题,可尝试下述方法:
1.下载文件
git clone https://github.com/ros/rosdistro.git
下载rosdistro,记住其下载存放路径,本文存放在/home/ubuntu/rosdistro
下载过程中若是报错:
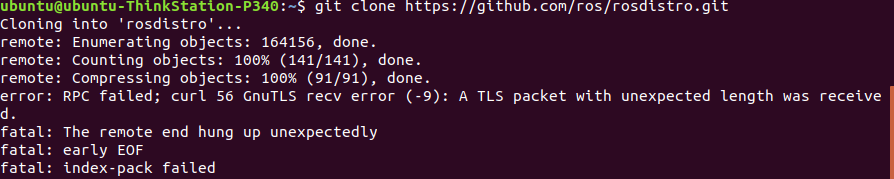
执行该命令git clone git://github.com/ros/rosdistro.git

2.修改.py文件中的URL
2.1 修改sources_list.py文件
下载完成后使用命令sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py打开.py文件
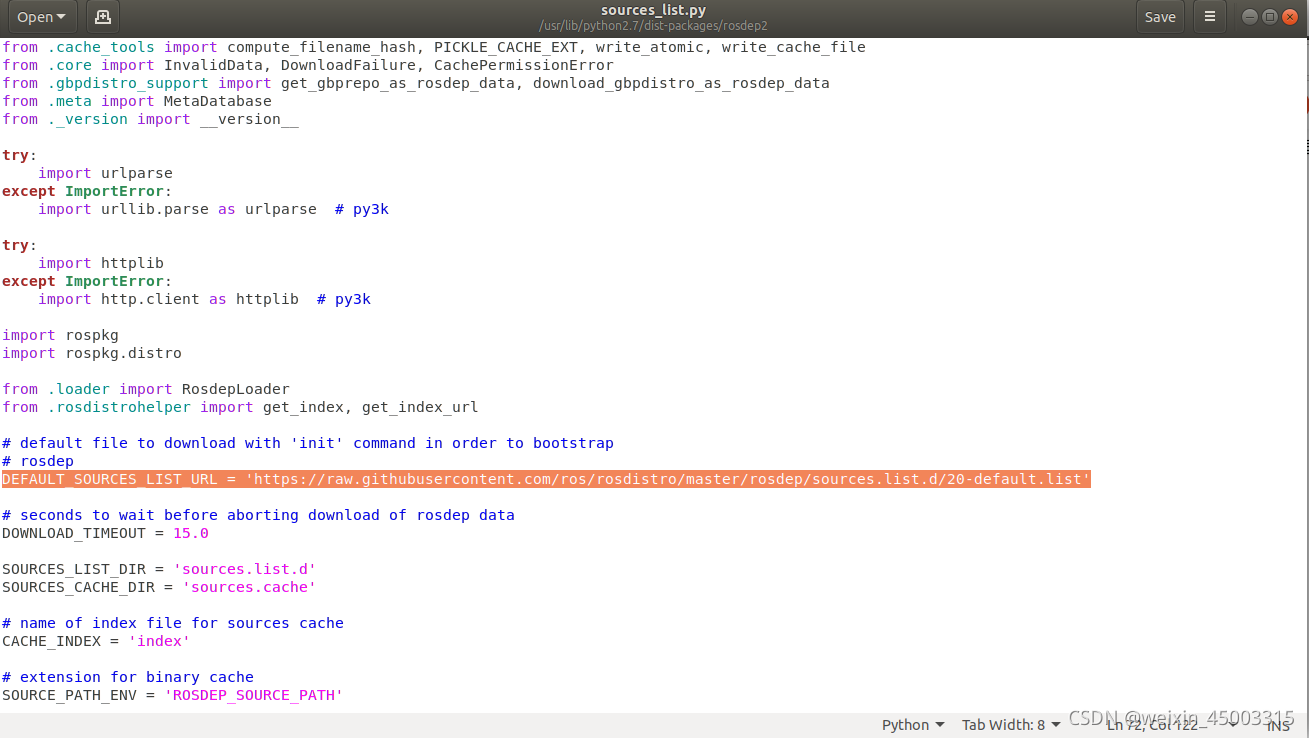 将文中选中部分修改为
将文中选中部分修改为DEFAULT_SOURCES_LIST_URL = 'file:///home/ubuntu/rosdistro/rosdep/sources.list.d/20-default.list'
其中home/ubuntu/rosdistro是文件rosdistro文件所存放的位置(下同)。
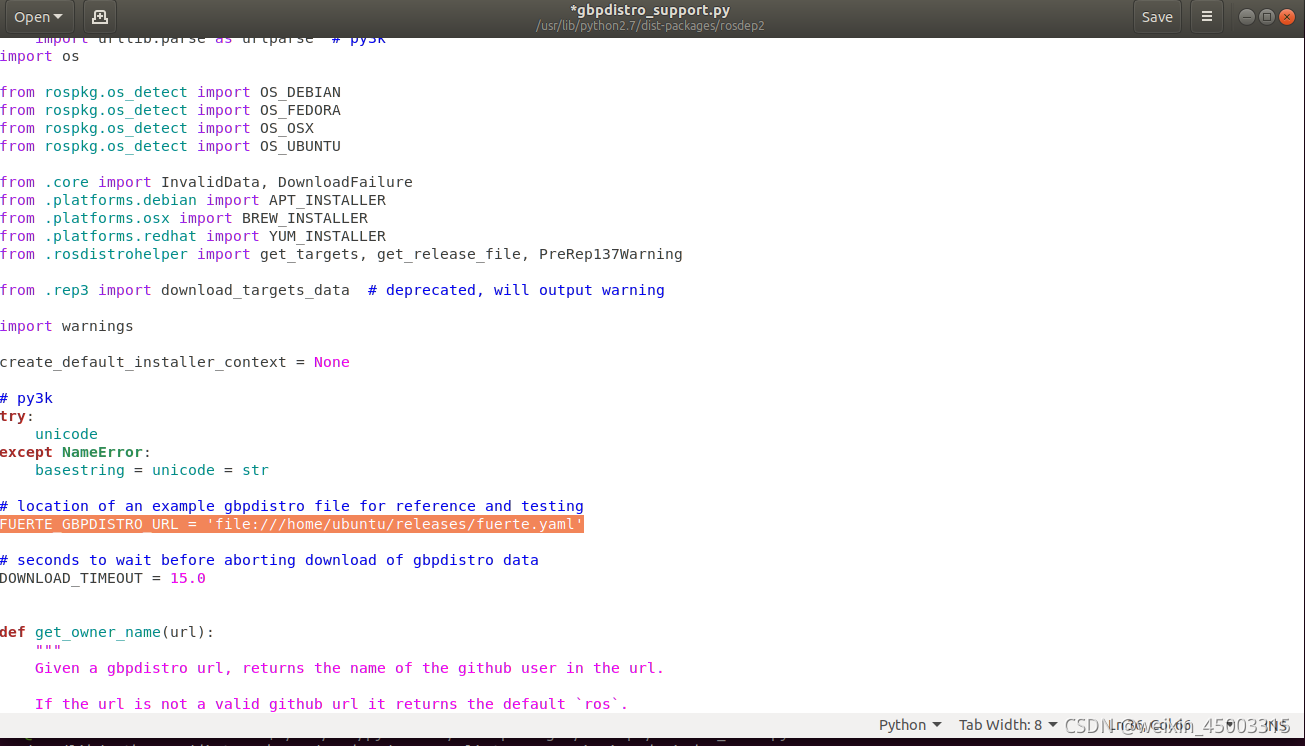
2.2 修改gbpdistro_support.py文件
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
将FUERTE_GBPDISTRO_URL修改如下:
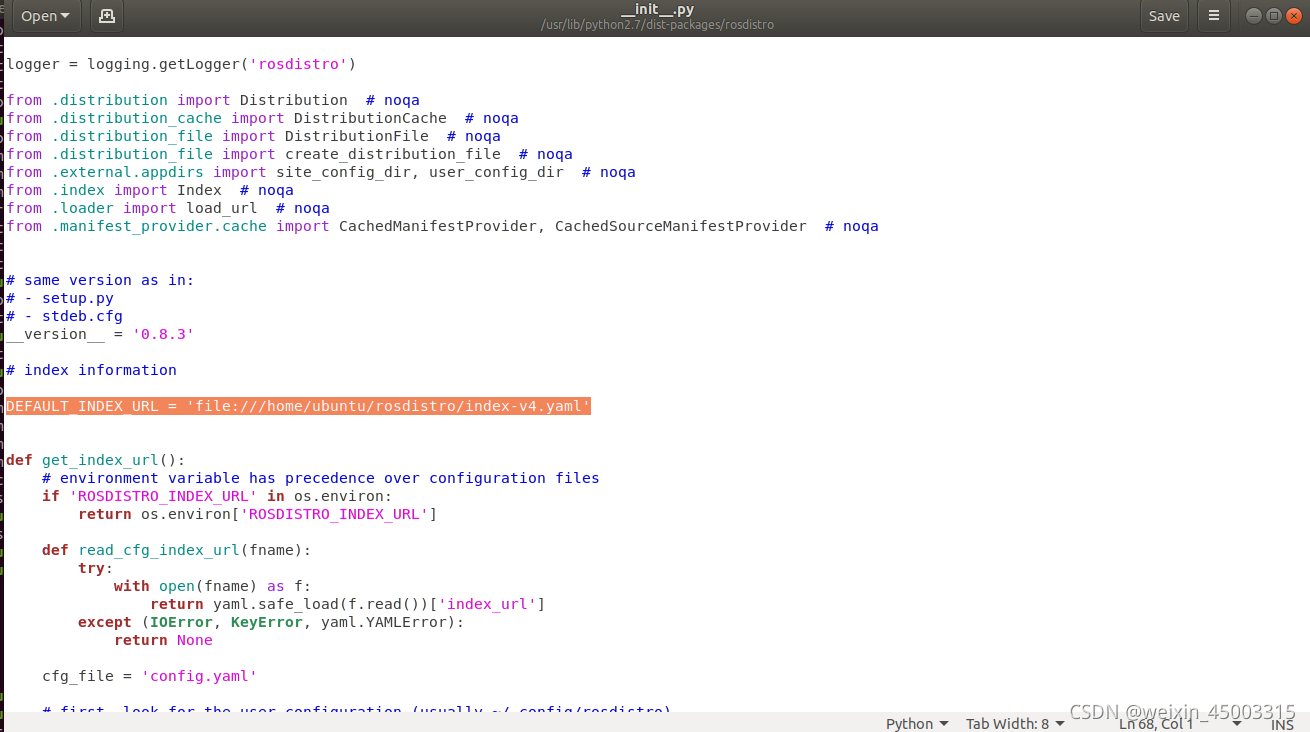
2.3修改__init__.py文件
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
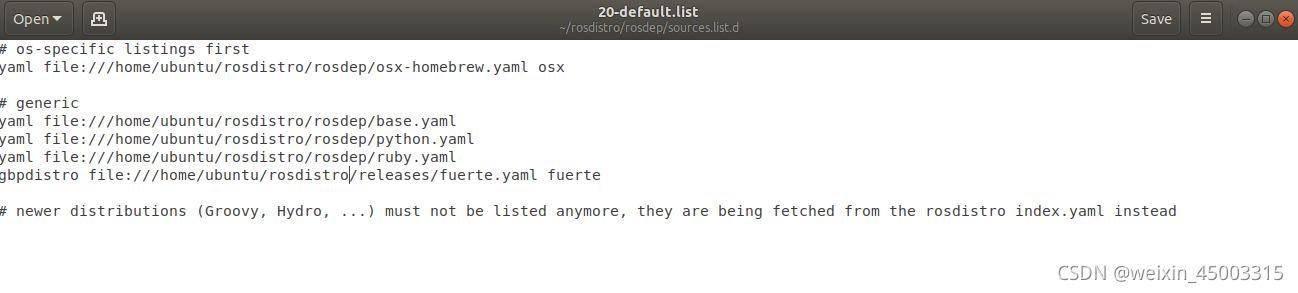
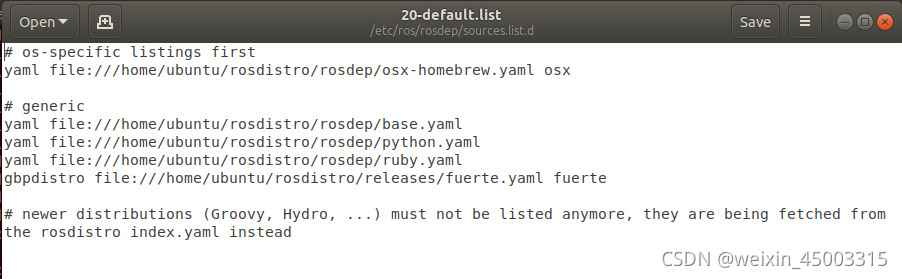
2.4修改20-default.list文件
打开该文件的路径根据自身安装位置所定
sudo gedit /home/ubuntu/rosdistro/rosdep/sources.list.d/20-default.list
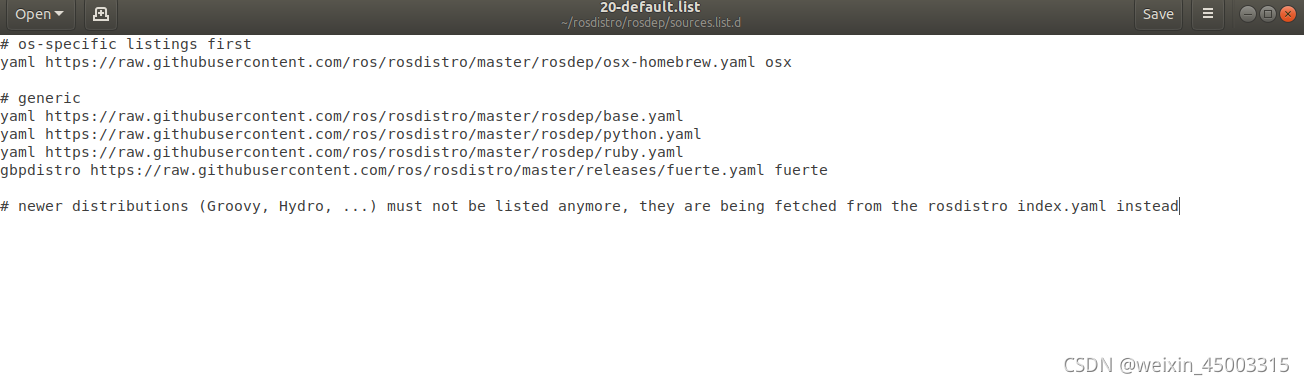 修改为:
修改为:
 执行rosdep update
执行rosdep update
如果报错如下:
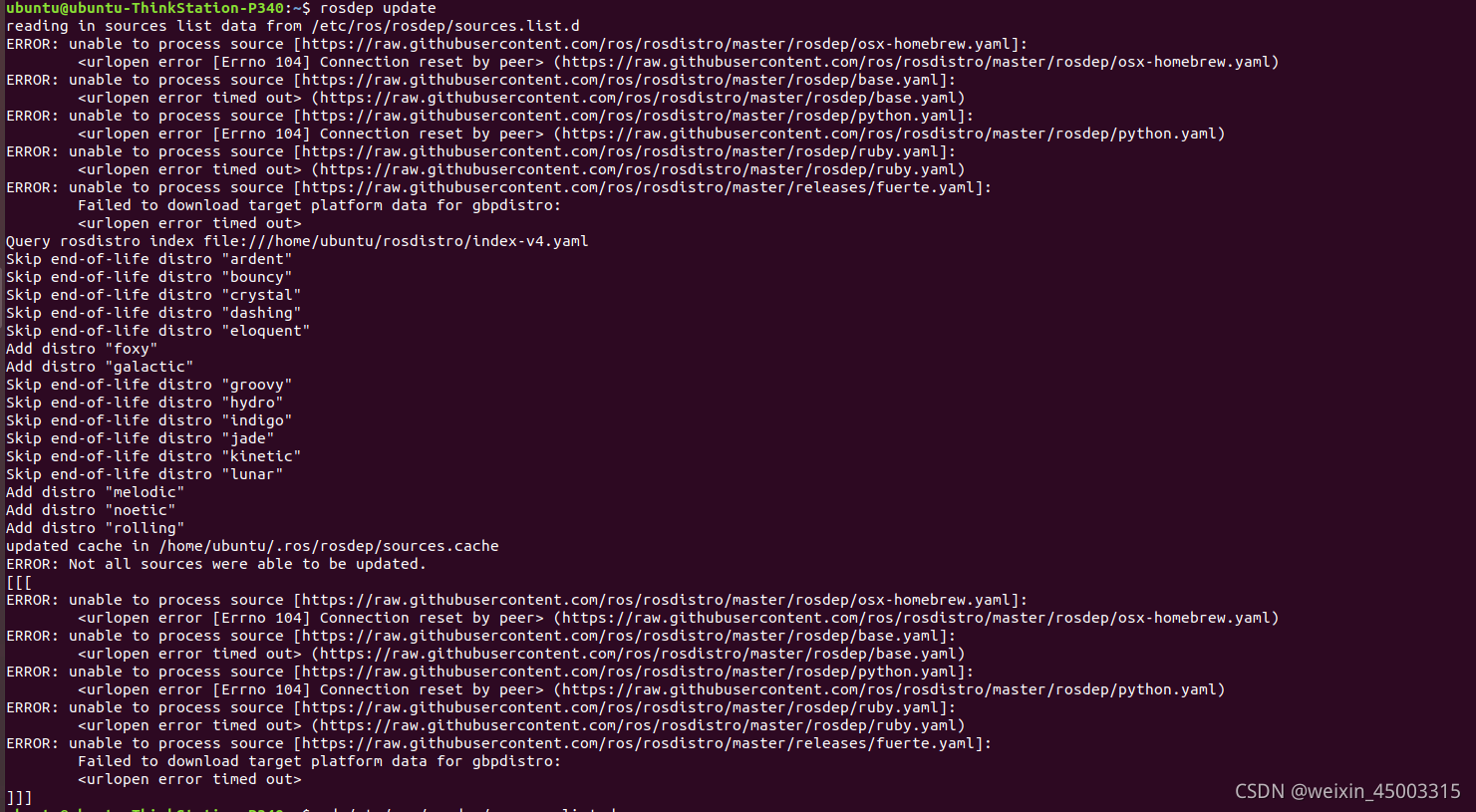
cd /etc/ros/rosdep/sources.list.d
sudo gedit 20-default.list
 再执行rosdep update即可。
再执行rosdep update即可。

















 2568
2568

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









