







 本文探讨了单目相机测距的原理,通过MobileyeEyeQ3相机为例,计算了测距误差并分析了精度。介绍了相机参数与测距误差的关系,以及单目摄像头的局限性。同时,提到了相机坐标系、像素坐标系和世界坐标系的概念,并讨论了相机畸变参数的实际应用。
本文探讨了单目相机测距的原理,通过MobileyeEyeQ3相机为例,计算了测距误差并分析了精度。介绍了相机参数与测距误差的关系,以及单目摄像头的局限性。同时,提到了相机坐标系、像素坐标系和世界坐标系的概念,并讨论了相机畸变参数的实际应用。
前言
读书笔记,随笔记录。
1 相机测距
1)在了解相机测距之前,先看一张LDW单目相机图片,可通过车道内前车图片的大小计算车距。原理可以简单理解为在高楼上看下边,下面就像是小蚂蚁。

有关单目相机测距,查看Mobileye单目相机测距精度计算论文_2003年。
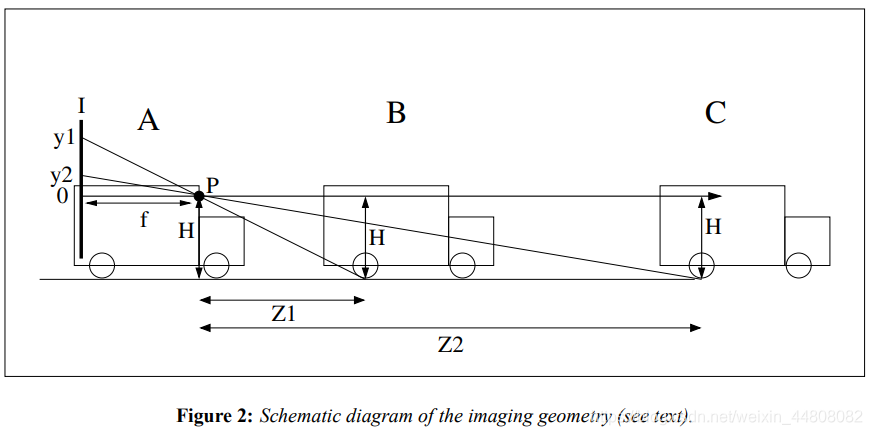
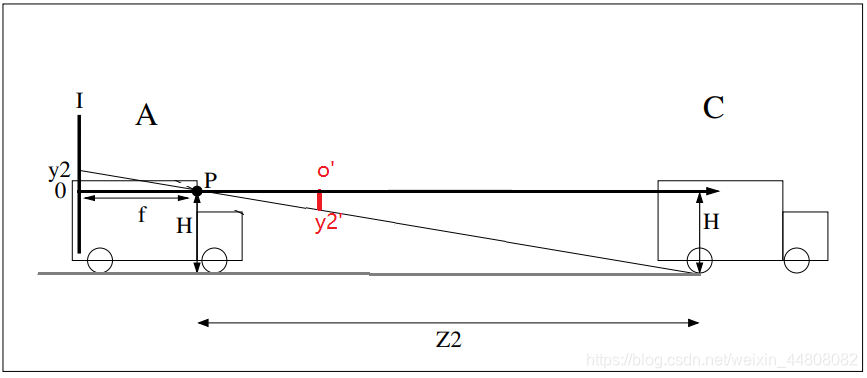
2)上图简化,设定高度H=1.2m,距离Z2=50m,焦距f=35mm。
检索Mobileye EyeQ3 相机性能
| 摄像头像素(彩 色) | 150w |
|---|---|
| 分辨率 | 1280*960 |
| 水平视角 | 52° |
| 垂直视角 | 39° |
| 图像: | Aptina AR0132 |
| 动态范围: | 115dB |
| 灵敏度: | 5,58V/lux-sec |
| 内置芯片: | Mobileye EyeQ3 |
| 像素尺寸: | 3.75um |
个人算法
-
通过像素尺寸和像素,计算CMOS尺寸:
(1280×3.75)×(960×3.75)=4.8mm×3.6mm -
依据小孔成像和中学相似三角形原理,车辆C在相机坐标系投影尺寸y2高度:
y2=f/z2 × h=0.84mm -
落在相邻坐标系像素尺寸0.375mm,测距误差
0.375μm/0.84mm=0.44×e-3
论文正确算法
-
Zn为落在相邻像素位置,Z为正确位置:
Zerr=Zn-Z=(f×H)/(y+n)-(f×H)/(y)=n×(f×H)/((y+n)×y)
y=f×h/z -
设定y远大于n:
Zerr≈n×Z×Z/(f×H) -
设定软件根据概率论,对像素的分辨率为1格,此时精度:
Zerr/Z≈n×Z/(f×H)
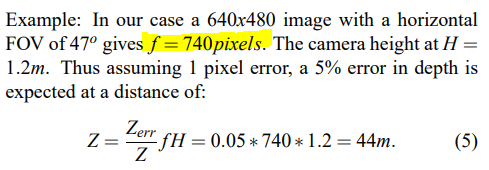
不理解焦距f使用740像素替代原理,从而得到精度为5%。
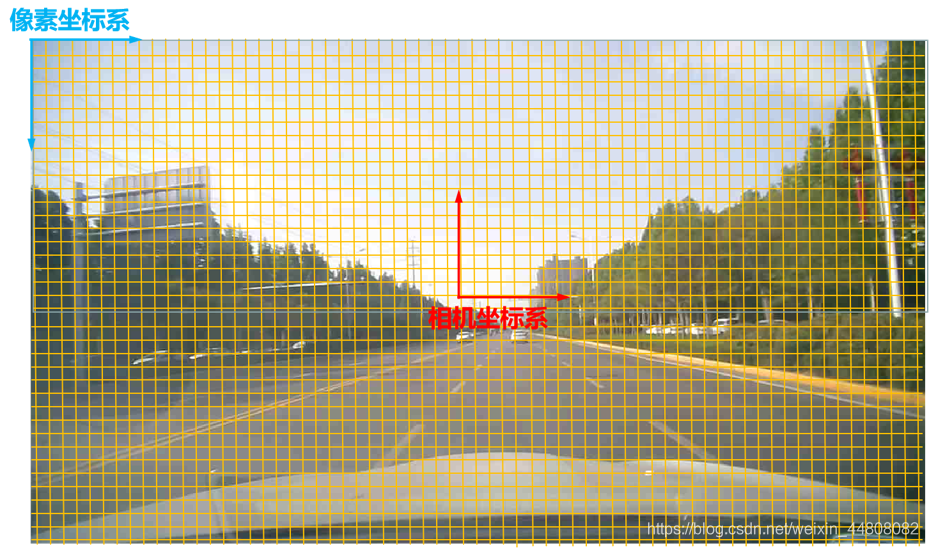
2 相机参数
有关世界坐标系、相机坐标系、像素坐标系,相机畸变参数等实际使用时再随笔记录。
3 单目摄像头局限性
待补充应用场景评价。


















 3054
3054

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









