







第一章
自动控制系统的基本概念:
是指无需人经常直接参与,而是通过对某一对象施加合乎目的的作用,以使其产生所希望的行为或变化的控制。上述控制虽然不是由人力来直接完成,但却是由人为了某种目的而预先造好的装置来完成的。这样的装置称为控制器。该装置按照人的安排接受某种信息,并遵循一定的法则加工这个信息,使其变为控制作用,以施加在对象上。这样的对象称为被控对象。被控对象在控制作用影响下,在其功能的限度内改变自己的状态。
开环控制系统与闭环控制系统分类:
开环控制系统是一种最简单的控制系统,在控制器和控制对象之间只有正向控制作用,系统的输出量不会对控制器产生任何影响。在该系统中,对每一个输入量,都有个与之对应的工作状态和输出量,系统的精度仅取决于元器件的精度和特性调整的精度。这类系统结构简单、成本低、容易控制,但是控制精度低,因为如果在控制器或控制对象上存在干扰,或者由于控制器元器件老化,控制对象结构或参数发生变化,都会导致系统输出的不稳定,使输出值偏离预期值。
开环控制系统的特点如下:
1)系统输出量不参与控制。
2)系统结构框图不形成闭合回路。
3)系统结构简单,不需监测被调量,输人输出一一对应。
4)控制精度取决于各组成环节的精度。
5)适用于传递关系已知,对输出精度无要求,且不含扰动的场合6)系统有扰动时只能靠人工操作,使输出达到期望值。
闭环控制系统是利用检测仪表将系统输出检测出来,经物理量的转换后,馈送到系统的输人端与给定信号比较(相减)得到偏差信号,并利用偏差信号经控制器对控制对象进行控制,抑制扰动对输出量的影响,减小输出量的误差
闭环控制系统的特点如下:
1)系统输出参与控制。
2)系统结构框图构成闭合回路。
3)是一种依偏差进行控制的系统,只要偏差存在,就有控制作用,其结果总是偏差减小。
4)对系统内部除反馈通道和给定通道外的一切扰动都有抑制作用。
5)易引起振荡。
对控制系统的基本要求
1:稳定性、稳定性是指当系统受到干扰后,经过一段时间仍能恢复到原状态或新的平衡状态的性能。
2:准确性、准确性是指系统输出量跟随给定量的精度的性能
3:快速性、快速性是指当系统受到干扰后能迅速恢复原状或达到新的平衡态的性能。
第二章:
数学模型的种类:
经典、微分方程、差分方程、瞬态响应函数、传递函数、频率特性。现代、状态方程、状态空间表达式。
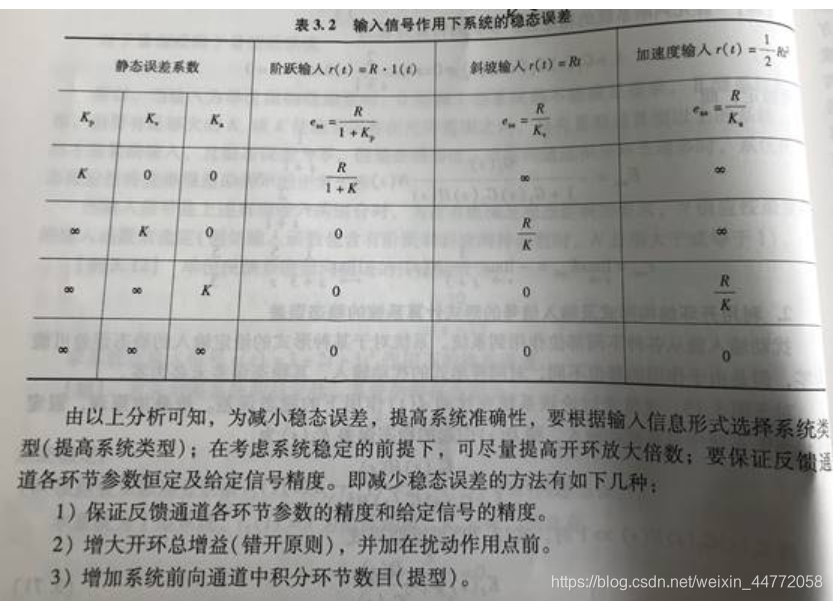
第三章:
系统的动态和稳态性能指标:
1)上升时间:对于具有振荡的系统,指单位阶跃响应从零第一次上升到稳态值所需的时间;对于单调变化的系统,指单位阶跃响应从稳态值的10%上升到90%所需的时间
2)峰值时间: 单位阶跃响应超过稳态值,到达第一个峰值所需的时间。
3)调节时间:单位阶跃响应与稳态值之间的偏差达到规定的允许范围(=士5%或+2%),且以后不再超出此范围的最短时间。
4)超调量:单位阶跃响应的最大值超过稳态值的百分比。
线性定常系统稳定的充要条件:闭环系统特征方程式的所有根全部为负实数或具有负实部的共轭复数也就是所有闲环特征根全部位于复平面的左半面。
第四章:
频率特性的定义:
系统的稳态输出正弦信与输入正弦信号的振幅比称为幅频特性,相位差称为相频特性。
控制系统的动态频域指标:
1)穿越(截止)频率W。:是频域分析法中的一个重要指标。从宏观上分析,在系统稳定的前提条件下,W。越大,表明系统允许通过且放大的信号频段越宽,对输入信号反应的灵敏度越强,系统的调节速度应加快。但这时,抗拒高频干扰信号的能力下降,对系统的稳定性不利。
2)相位裕量γ和幅值裕量Kg:是用于衡量系统稳定程度的重要指标。其中,工程上常用的是相位裕量γ。从宏观上分析,相位裕量γ越大,系统的稳定程度越好,但调节速度会随之减慢。
3)抗高频干扰的能力:控制系统的抗干扰能力主要用频率特性曲线高频段折线的斜率和转折频率的大小来确定。高频段折线的斜率越负,对高频信号的衰减能力越强;转折频率越小,被衰减信号的频率段越宽。
第五章:
串联校正典型环节特性




















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









