






1. 矩阵的几何意义
让我详细解释矩阵与几何变换的对应关系:
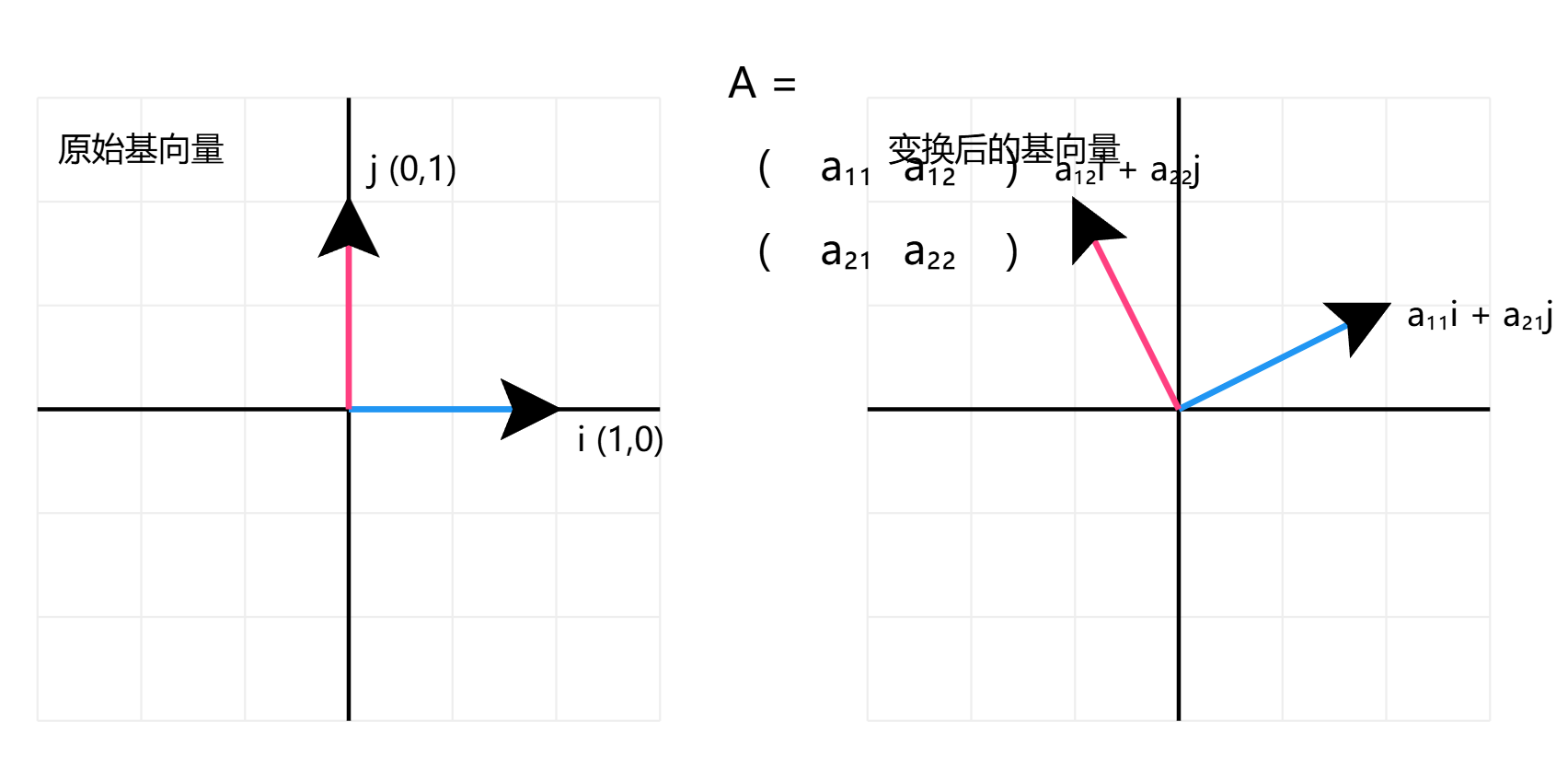
- 基向量的概念
- 在原始坐标系中(左图):
- 蓝色箭头是基向量 i = (1,0)
- 粉色箭头是基向量 j = (0,1)
- 这两个基向量定义了标准坐标系
- 矩阵的几何意义
对于矩阵 A = ( a 11 a 12 a 21 a 22 ) A = \begin{pmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{pmatrix} A=(a11a21a12a22):
- 第一列 ( a 11 a 21 ) \begin{pmatrix} a_{11} \\ a_{21} \end{pmatrix} (a11a21) 表示变换后的基向量 i 的新坐标
- 第二列 ( a 12 a 22 ) \begin{pmatrix} a_{12} \\ a_{22} \end{pmatrix} (a12a22) 表示变换后的基向量 j 的新坐标
- 变换过程(右图)
- 蓝色箭头:原本的 i 向量被变换到新位置 ( a 11 , a 21 ) (a_{11}, a_{21}) (a11,a21)
- 粉色箭头:原本的 j 向量被变换到新位置 ( a 12 , a 22 ) (a_{12}, a_{22}) (a12,a22)
- 这两个新向量定义了变换后的坐标系
- 矩阵的迹的几何意义
t r ( A ) = a 11 + a 22 tr(A) = a_{11} + a_{22} tr(A)=a11+a22
- a 11 a_{11} a11 表示 i 向量在 x 方向的伸缩
- a 22 a_{22} a22 表示 j 向量在 y 方向的伸缩
- 它们的和反映了整体的面积变化趋势
例如,对于矩阵:
A
=
(
2
1
−
1
3
)
A = \begin{pmatrix} 2 & 1 \\ -1 & 3 \end{pmatrix}
A=(2−113)
- i 向量从 (1,0) 变换到 (2,-1)
- j 向量从 (0,1) 变换到 (1,3)
- 迹 = 2 + 3 = 5 表示整体有扩张趋势
这种对应关系帮助我们理解:
- 矩阵的每个元素都对应具体的几何变换
- 迹反映了变换的整体特性
- 变换可以通过基向量的变化直观理解
2. 矩阵的几何意义,就是有一个矩阵A,让向量发生线性转换?
是的,矩阵 A 就是一个线性变换算子,它能将向量进行线性转换。让我解释这个过程:
- 线性变换的本质
- 矩阵 A 作用于向量 v 的过程可以写作:
A v ⃗ = ( a 11 a 12 a 21 a 22 ) ( x y ) = ( a 11 x + a 12 y a 21 x + a 22 y ) A\vec{v} = \begin{pmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} a_{11}x + a_{12}y \\ a_{21}x + a_{22}y \end{pmatrix} Av=(a11a21a12a22)(xy)=(a11x+a12ya21x+a22y)
- 变换的特点
- 保持原点不变(向量 (0,0) 变换后仍是 (0,0))
- 保持直线性(直线变换后仍是直线)
- 保持向量加法( ( A v 1 ⃗ + A v 2 ⃗ ) = A ( v 1 ⃗ + v 2 ⃗ ) (A\vec{v_1} + A\vec{v_2}) = A(\vec{v_1} + \vec{v_2}) (Av1+Av2)=A(v1+v2))
- 保持标量乘法( A ( c v ⃗ ) = c ( A v ⃗ ) A(c\vec{v}) = c(A\vec{v}) A(cv)=c(Av))
- 常见的线性变换
- 旋转: A = ( cos θ − sin θ sin θ cos θ ) A = \begin{pmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{pmatrix} A=(cosθsinθ−sinθcosθ)
- 缩放: A = ( s x 0 0 s y ) A = \begin{pmatrix} s_x & 0 \\ 0 & s_y \end{pmatrix} A=(sx00sy)
- 镜像: A = ( 1 0 0 − 1 ) A = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} A=(100−1)
- 变换的计算
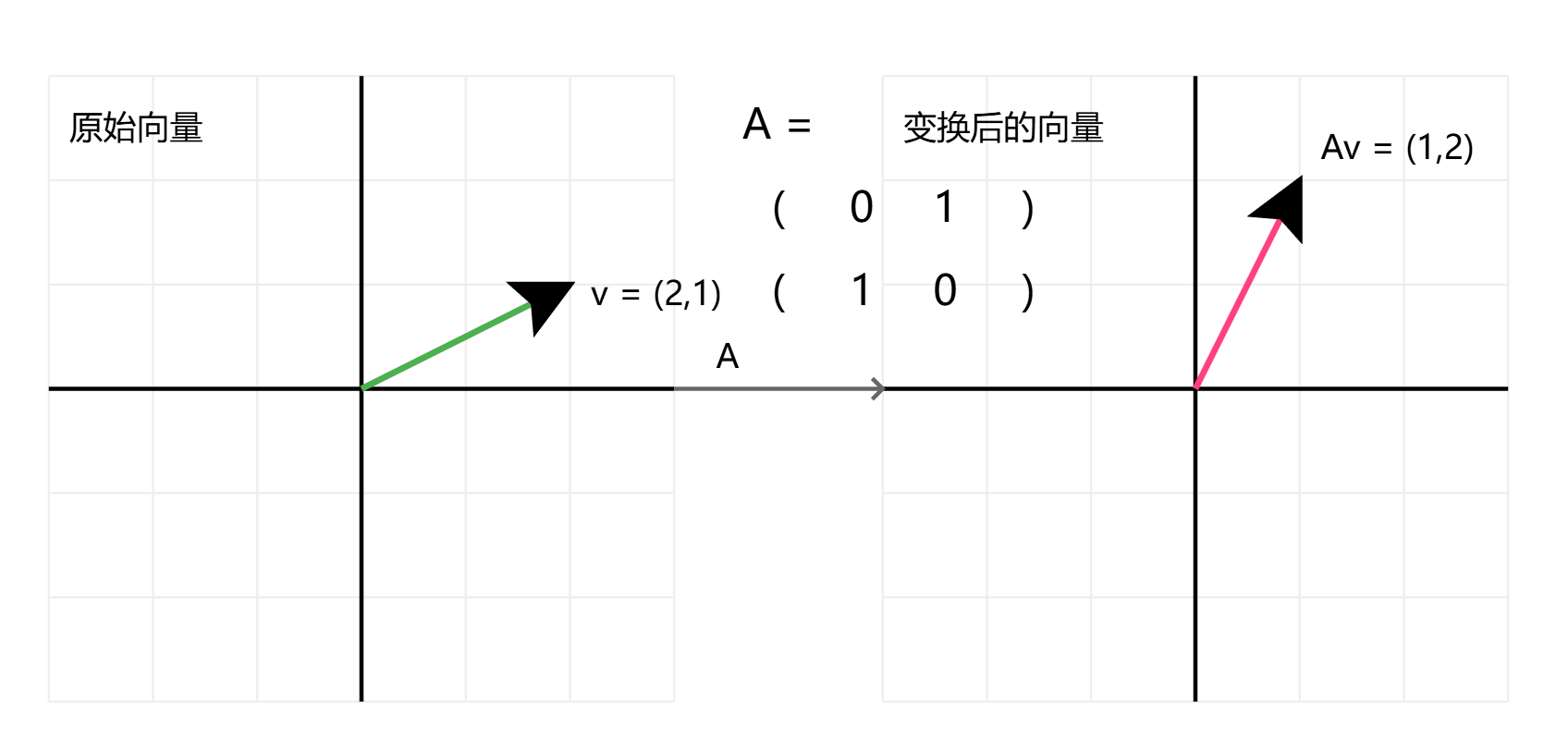
例如,对于向量 v ⃗ = ( 2 , 1 ) \vec{v} = (2,1) v=(2,1) 和矩阵 A = ( 0 1 1 0 ) A = \begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix} A=(0110):
A v ⃗ = ( 0 1 1 0 ) ( 2 1 ) = ( 1 2 ) A\vec{v} = \begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix} \begin{pmatrix} 2 \\ 1 \end{pmatrix} = \begin{pmatrix} 1 \\ 2 \end{pmatrix} Av=(0110)(21)=(12)
在上图中:
- 左侧绿色向量是原始向量 v ⃗ = ( 2 , 1 ) \vec{v} = (2,1) v=(2,1)
- 右侧粉色向量是变换后的向量 A v ⃗ = ( 1 , 2 ) A\vec{v} = (1,2) Av=(1,2)
- 矩阵 A 实现了一个简单的坐标交换变换
这就是矩阵作为线性变换的核心思想:它将空间中的每个向量按照一定的规则进行转换,同时保持了线性关系。


















 2641
2641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











