




 本文介绍了相机标定的基本原理,包括相机成像的坐标映射、相机镜头的影响以及位移旋转对成像的影响。详细阐述了从世界坐标到二维平面坐标的映射过程,并涉及相机内部参数(如焦距、主点偏移、畸变参数)和外部参数(旋转和平移)。文章还提及了相机标定的实验流程,包括使用棋盘格图片提取角点信息,以实现相机标定。
本文介绍了相机标定的基本原理,包括相机成像的坐标映射、相机镜头的影响以及位移旋转对成像的影响。详细阐述了从世界坐标到二维平面坐标的映射过程,并涉及相机内部参数(如焦距、主点偏移、畸变参数)和外部参数(旋转和平移)。文章还提及了相机标定的实验流程,包括使用棋盘格图片提取角点信息,以实现相机标定。
Python 相机标定
1 相机标定原理
1.1 相机成像及坐标映射
摄像机成像利用的是小孔成像原理,一个针孔型相机,通过一个投影中心(光心),将三维空间中的物体呈现在二维平面上,显然这是一个降维过程。那么相机要处理的问题就是,如何将三维空间中的坐标映射到二维空间中的坐标。为了确定这种三维到二维的映射关系,就要建立相机的几何模型,这些模型参数就是相机的参数,它包括相机的内部参数、外部参数(旋转位移等),确定这些相机的内外参数的过程就是相机标定。
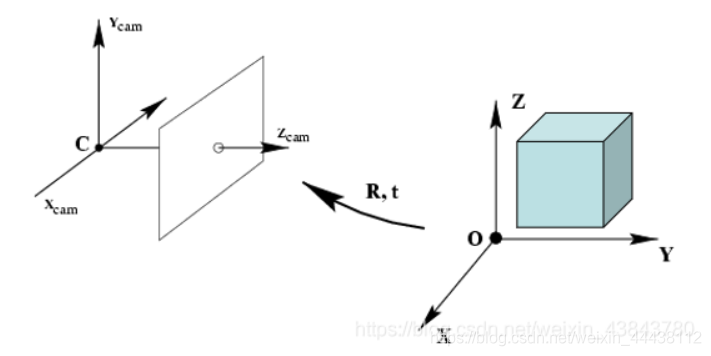
世界坐标系到相机坐标系:
世界三维坐标到二维平面坐标的映射:
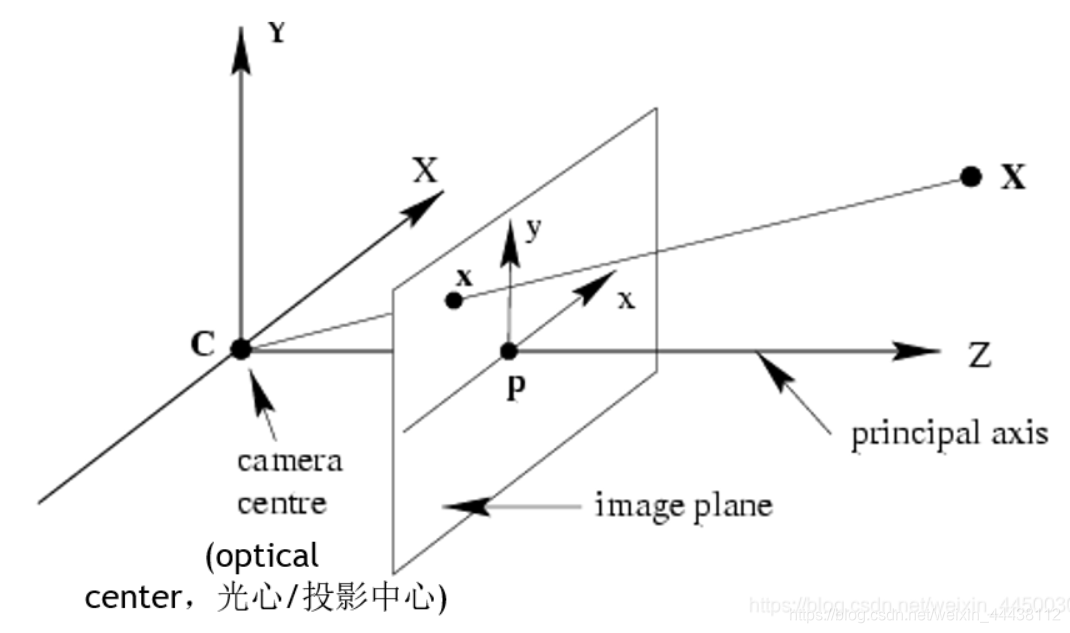
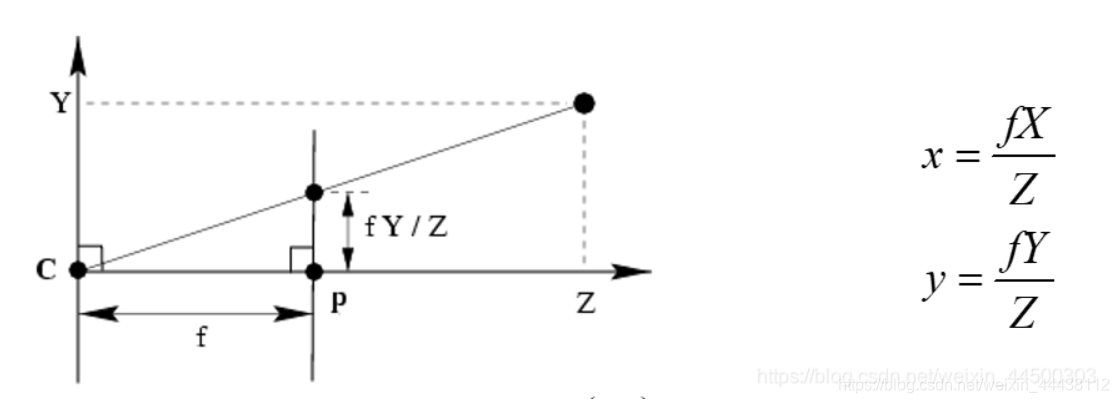 相机投影中心在C点,P所在直线为二维平面,那么确定三围空间中的物体,在二维空间中的y坐标,可以根据三角形相似来得到,其中X、Y、Z为物体在世界三维空间中的坐标,f为相机焦距,x、y为物体在二维平面上的坐标。最终得到的二维平面上的坐标x=fX/Z、y=fY/Z。
相机投影中心在C点,P所在直线为二维平面,那么确定三围空间中的物体,在二维空间中的y坐标,可以根据三角形相似来得到,其中X、Y、Z为物体在世界三维空间中的坐标,f为相机焦距,x、y为物体在二维平面上的坐标。最终得到的二维平面上的坐标x=fX/Z、y=fY/Z。
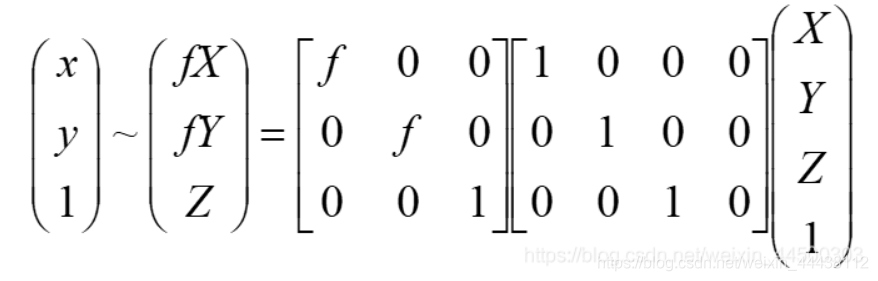
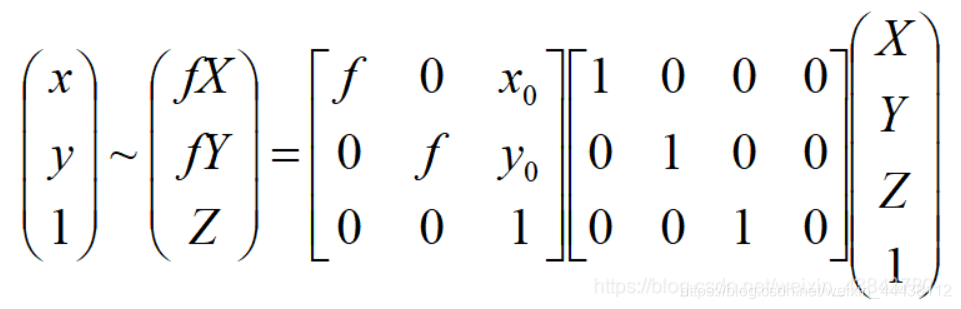
将坐标公式推导为等价的矩阵:
考虑到主点偏移(相机的光心C和图像坐标系的中心有些偏移)修改矩阵:
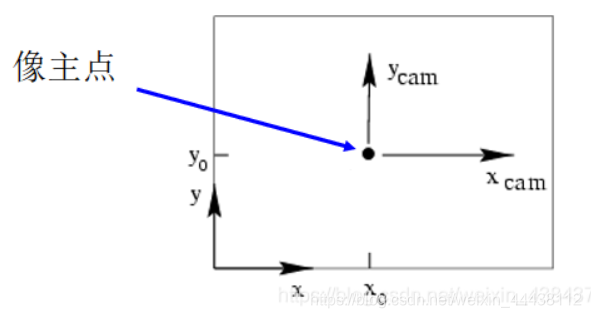
其中x0表示x方向的位移,y0表示y方向的位移。
1.2 相机镜头及位移旋转的影响
相机镜头及位移的影响:
相机的镜头分为多种:广角镜头、鱼眼镜头等。这种镜头拍摄出来的照片和普通镜头拍摄出来的不一样,会发生图像的畸变。图像发生了畸变后,映射到的二维平面上的某个点,就不是它在平面上的实际位置,实际正确的位置应该发生一些畸变的偏移。畸变的类型主要有三种:无畸变、桶型畸变、枕型畸变。
实际中,人们拿相机拍摄的时候,相机的位置是可能发生变化的,拍摄的时候相机也是可能有旋转角度的
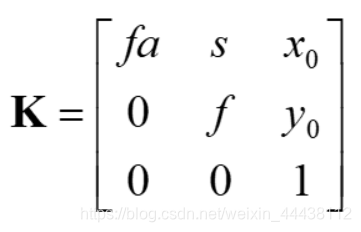
考虑到畸变情况修改K矩阵:
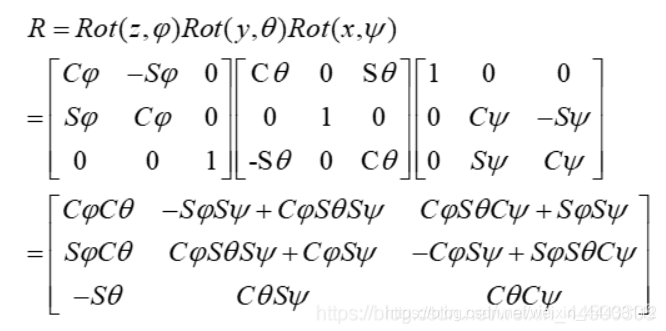
考虑到位移旋转情况修改矩阵:

总结一下:

K:相机内部参数,包括焦距,像主点坐标,畸变参数
[R|t]:相机外部参数:旋转,平移
2 相机标定
2.1 实验代码及结果
标定流程:
先准备标定图片(棋盘格图片),然后对每一张标定图片,提取角点信息,再对每一张标定图片,进一步提取亚像素角点信息,进行相机标定。
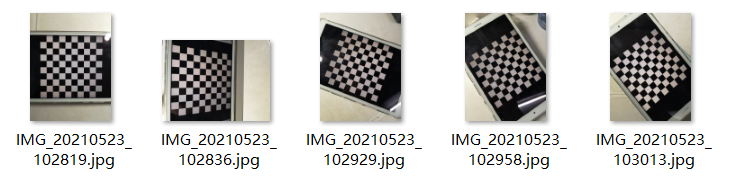
实验数据:
用手机拍摄的五张不同角度和位置的棋盘格照片:
实验代码:
import cv2
import numpy as np
import glob
# 找棋盘格角点
# 阈值
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
# 棋盘格模板规格
w = 7 # 内角点个数,内角点是和其他格子连着的点
h = 7
# 世界坐标系中的棋盘格点,例如(0,0,0), (1,0,0), (2,0,0) ....,(8,5,0), 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1816
1816

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









