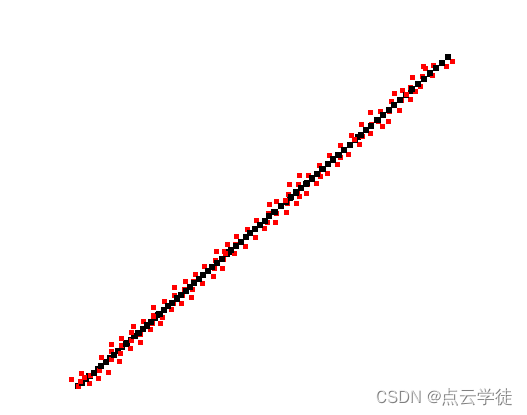
PCL点云处理之最小二乘空间直线拟合(3D) (二百零二) 一、算法简介 二、实现代码 三、效果展示 一、算法简介 对于空间中的这样一组点:大致呈直线分布,散乱分布在直线左右, 我们可采用最小二乘方法拟合直线,更进一步地,可以通过点到直线的投影,最终得到一组严格呈直线分布的点,同时,这个结果也可以验证最小二乘拟合得到的直线参数是否正确,使用下面的代码可以得到上图中的结果。(其中图片中的点解释和具体的实现代码如下所示) 二、实现代码 具体的计算过程,在代码中已经详细给出 主要时EIGEN库用于矩阵求逆,其他的都是PCL库数据容器,替换为自己的数据容器也可以 #include <iostream> #include










 该博客介绍了如何使用最小二乘法在3D空间中对点云进行直线拟合。通过点云处理,可以将散乱的点投影到直线,验证拟合参数的准确性。文章包含算法简介、实现代码和效果展示,其中代码基于EIGEN库和PCL库。
该博客介绍了如何使用最小二乘法在3D空间中对点云进行直线拟合。通过点云处理,可以将散乱的点投影到直线,验证拟合参数的准确性。文章包含算法简介、实现代码和效果展示,其中代码基于EIGEN库和PCL库。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 213
632
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
213
632
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








