







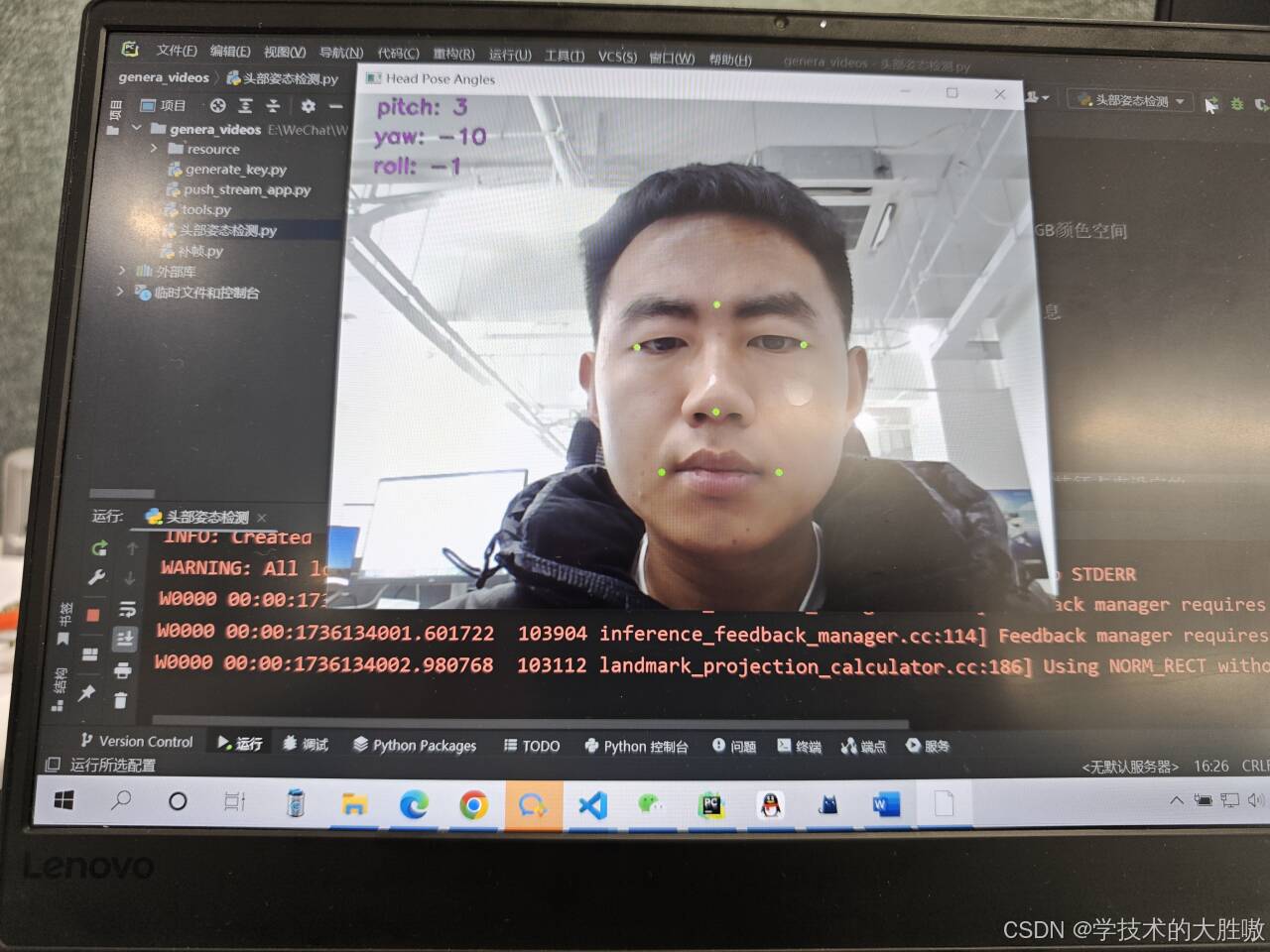
本代码采用Python开发,精准检测人脸关键点,计算头部俯仰角、偏航角和滚转角,依据头部转动角度变化判断转头作弊,适用于在线考试监考、远程面试等场景。
代码经过精心优化,附有详细中文注释,初学者也能迅速掌握功能与原理,轻松二次开发或项目拓展。
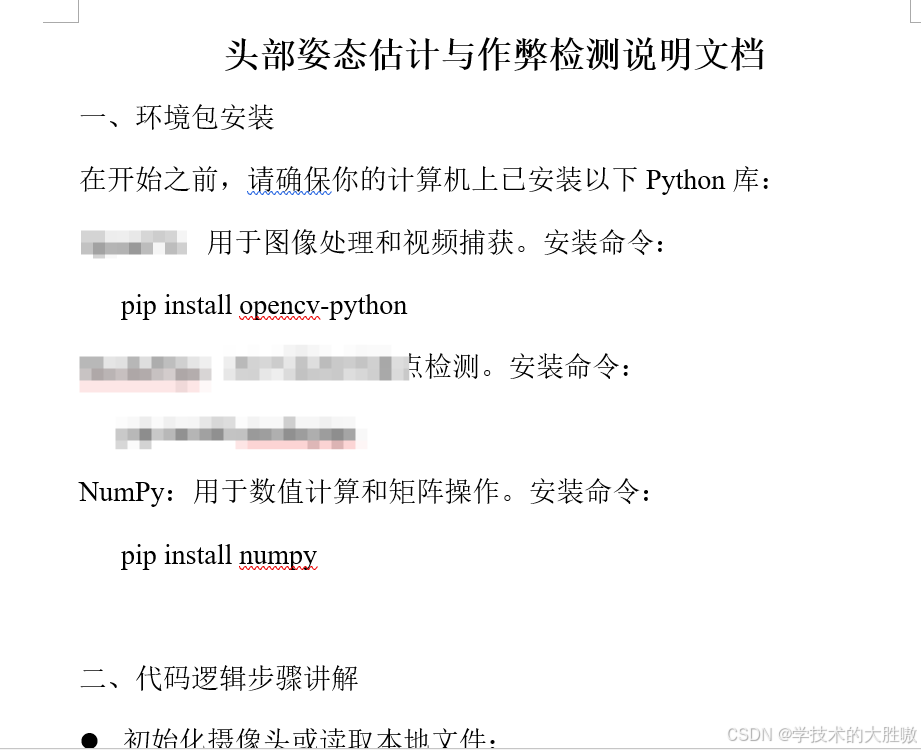
代码配套解释文档,包括依赖安装和代码分析。
已在多台电脑上成功运行,稳定性有保障!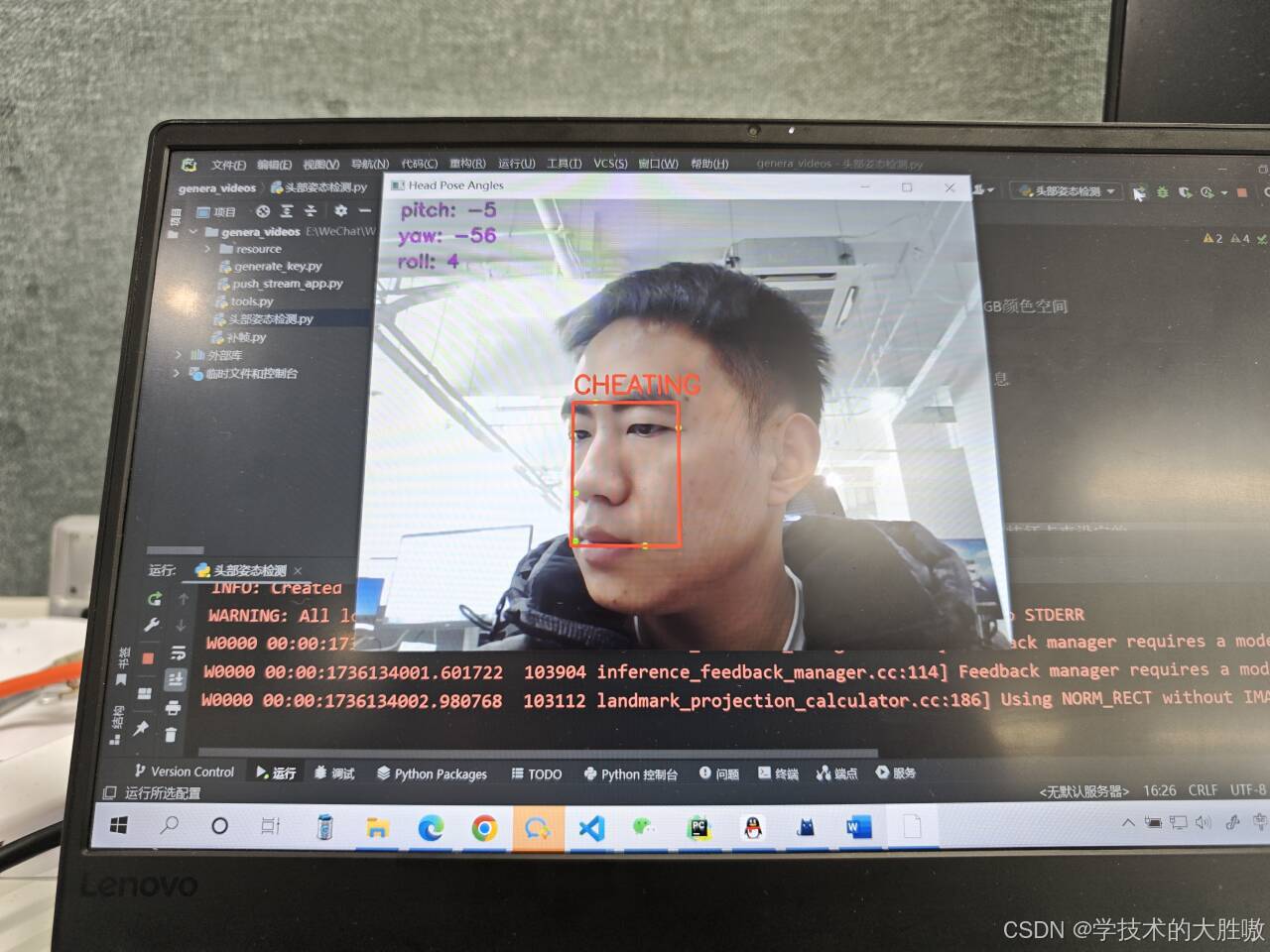
import math
import cv2
import mediapipe as mp
import numpy as np
# 初始化MediaPipe的人脸网格模型,用于检测和跟踪人脸的关键点
mp_face_mesh = mp.solutions.face_mesh
face_mesh = mp_face_mesh.FaceMesh(min_detection_confidence=0.5, # 设置最小检测置信度
min_tracking_confidence=0.5) # 设置最小跟踪置信度
# 使用本地视频文件进行处理
# video_path = r'E:\Project\head_pose\test.mp4'
# cap = cv2.VideoCapture(video_path)
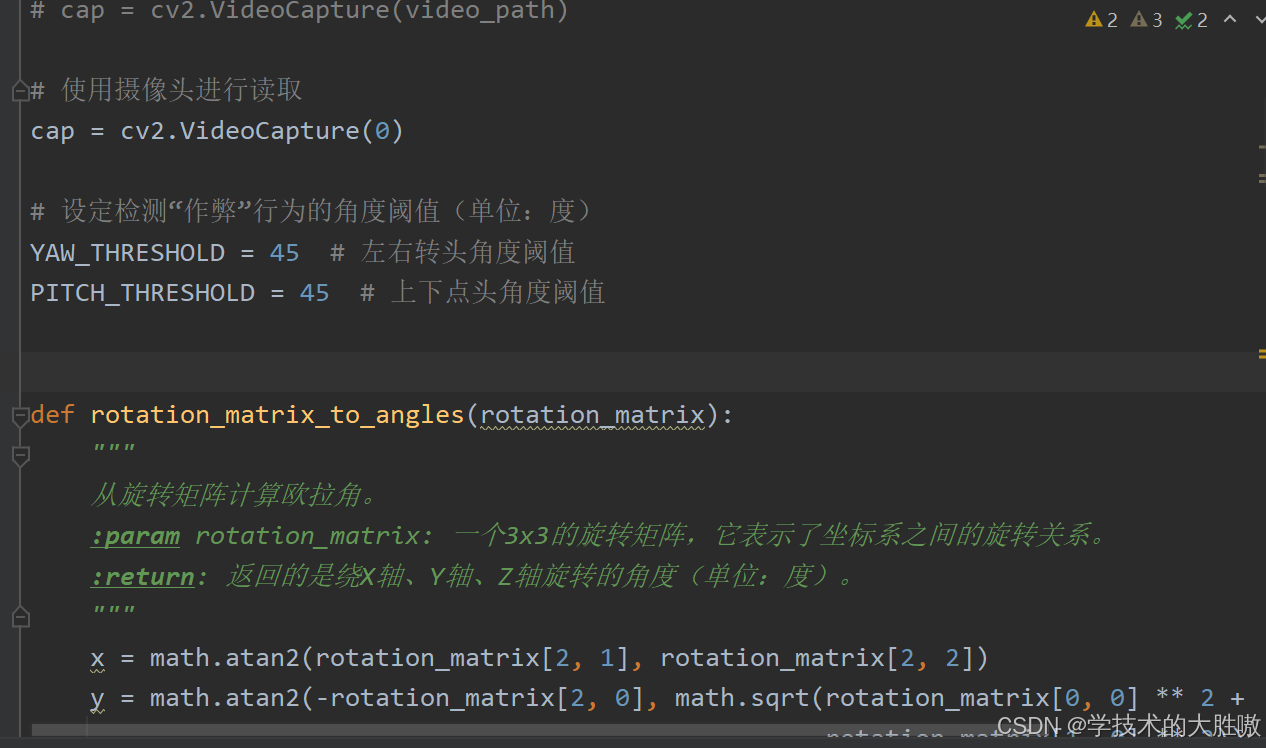
# 使用摄像头进行读取
cap = cv2.VideoCapture(0)
# 设定检测“作弊”行为的角度阈值(单位:度)
YAW_THRESHOLD = 45 # 左右转头角度阈值
PITCH_THRESHOLD = 45 # 上下点头角度阈值
def rotation_matrix_to_angles(rotation_matrix):
"""
从旋转矩阵计算欧拉角。
:param rotation_matrix: 一个3x3的旋转矩阵,它表示了坐标系之间的旋转关系。
:return: 返回的是绕X轴、Y轴、Z轴旋转的角度(单位:度)。
"""
x = math.atan2(rotation_matrix[2, 1], rotation_matrix[2, 2])
y = math.atan2(-rotation_matrix[2, 0], math.sqrt(rotation_matrix[0, 0] ** 2 +
rotation_matrix[1, 0] ** 2))
z = math.atan2(rotation_matrix[1, 0], rotation_matrix[0, 0])
# 将弧度转换为角度
return np.array([x, y, z]) * 180. / math.pi
while cap.isOpened():
success, image = cap.read()
if not success:
print("无法读取视频帧")
break
# 将图像的颜色空间从BGR转换到RGB,因为Mediapipe使用的是RGB颜色空间
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# 使用MediaPipe的人脸网格模型处理当前帧,得到人脸关键点信息
results = face_mesh.process(image)
# 将图像的颜色空间再转换回BGR,以便在OpenCV中正确显示
image = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)
# 定义人脸在现实世界中的三维坐标,这些坐标是基于特定的面部特征点来设定的
face_coordination_in_real_world = np.array([
[285, 528, 200],
[285, 371, 152],
[197, 574, 128],
[173, 425, 108],
[360, 574, 128],
[391, 425, 108]
], dtype=np.float64)
h, w, _ = image.shape # 获取图像的高度、宽度
face_coordination_in_image = [] # 用于存储选定的人脸关键点在图像中的二维坐标
if results.multi_face_landmarks:
for face_landmarks in results.multi_face_landmarks:
for idx, lm in enumerate(face_landmarks.landmark):
# 选择特定的面部关键点(例如:鼻子、眼睛等),并将它们的坐标转换为图像坐标
if idx in [1, 9, 57, 130, 287, 359]: # 选择要使用的特定关键点索引
x, y = int(lm.x * w), int(lm.y * h)
face_coordination_in_image.append([x, y])
# 在图像上标记出这些关键点
cv2.circle(image, (x, y), 3, (0, 255, 0), -1)
# 将所有选中的关键点坐标转换为NumPy数组
face_coordination_in_image = np.array(face_coordination_in_image, dtype=np.float64)
# 相机矩阵,用于描述相机内部参数,如焦距和主点
focal_length = 1 * w # 简单估算焦距,这里假设焦距等于图像宽度
cam_matrix = np.array([[focal_length, 0, w / 2],
[0, focal_length, h / 2],
[0, 0, 1]])
# 畸变系数矩阵,假设没有畸变
dist_matrix = np.zeros((4, 1), dtype=np.float64)
# 使用solvePnP函数根据已知的三维坐标和对应的二维坐标来求解物体的姿态(旋转和平移向量)
success, rotation_vec, transition_vec = cv2.solvePnP(
face_coordination_in_real_world, face_coordination_in_image,
cam_matrix, dist_matrix)
# 使用Rodrigues函数将旋转向量转换为旋转矩阵
rotation_matrix, jacobian = cv2.Rodrigues(rotation_vec)
# 将旋转矩阵转换为欧拉角,以获得俯仰角(pitch)、偏航角(yaw)和滚转角(roll)
# 这些角表示了绕x y z三个轴旋转的程度
result = rotation_matrix_to_angles(rotation_matrix)
# 检查是否有人转动头部超过了设定的阈值(可能表示作弊)
yaw, pitch, roll = result
is_cheating = False
if abs(yaw) > YAW_THRESHOLD or abs(pitch) > PITCH_THRESHOLD:
is_cheating = True
# 在图像上显示每个欧拉角的数值
for i, info in enumerate(zip(('pitch', 'yaw', 'roll'), result)):
k, v = info # k是欧拉角的名称(pitch、yaw、roll),v是对应的欧拉角值
text = f'{k}: {int(v)}' # 格式化文本
cv2.putText(image, text, (20, i * 30 + 20),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (200, 0, 200), 2)
# 如果检测到作弊行为,则在人脸周围绘制矩形框,并标注“CHEATING”
if is_cheating:
# 计算人脸的边界框
x_min = int(min(face_coordination_in_image[:, 0]))
x_max = int(max(face_coordination_in_image[:, 0]))
y_min = int(min(face_coordination_in_image[:, 1]))
y_max = int(max(face_coordination_in_image[:, 1]))
# 绘制红色矩形框
cv2.rectangle(image, (x_min, y_min), (x_max, y_max), (0, 0, 255), 2)
# 在矩形框上方显示“CHEATING”文本
cv2.putText(image, 'CHEATING', (x_min, y_min - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
# 显示处理后的图像
cv2.imshow('Head Pose Angles', image)
# 如果按下ESC键,则退出循环
if cv2.waitKey(5) & 0xFF == 27:
break
# 释放视频捕获对象并关闭所有OpenCV窗口
cap.release()
cv2.destroyAllWindows()

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









