






周末有空,简单回顾下之前做的横向控制LKA,发现里面还是有一些问题可以去讨论并探究的。LKA就是车辆方向盘由控制器控制,保持在自车车道中间的一种模式,车辆横向控制一般有以下3种方法:
1.基于模型的persuit算法以及stanley算法。
2 .无模型下的pid算法
3.基于模型预测的MPC算法
谈到车辆控制就不得不说两种车辆建模的方式,车辆运动学和车辆动力学,横向控制在这里暂时讨论基于运动学的(动力学的可以参考无人驾驶车辆模型预估控制以及apollo开源5.0控制代码)。
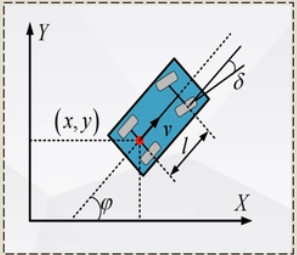
车辆在该坐标系满足:,
,
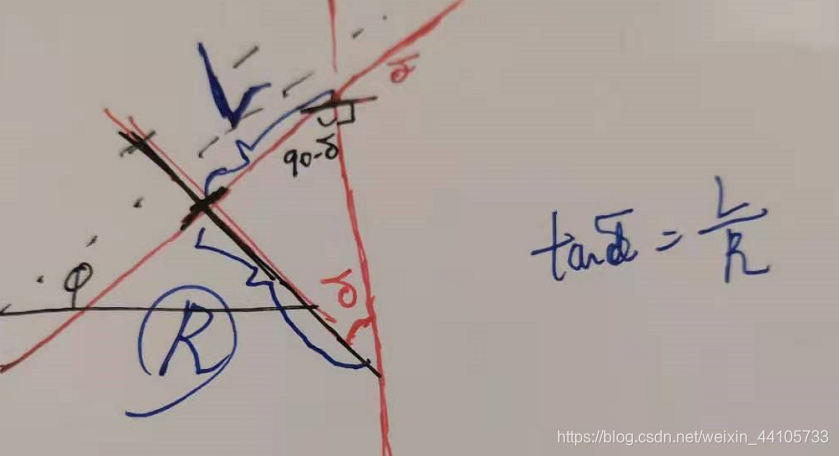
, 简化该模型到自行车模型,那么在车辆还未运动的情况下,如下图
, 将曲率k带入公式,就可以得到此刻车辆的转角关系式:
车辆此刻转弯,在该时刻到下一时刻,车辆的后轴从start(x,y)移动到end(x,y)点,通过下一时刻车辆走过的几何路径求得对应的转角 .
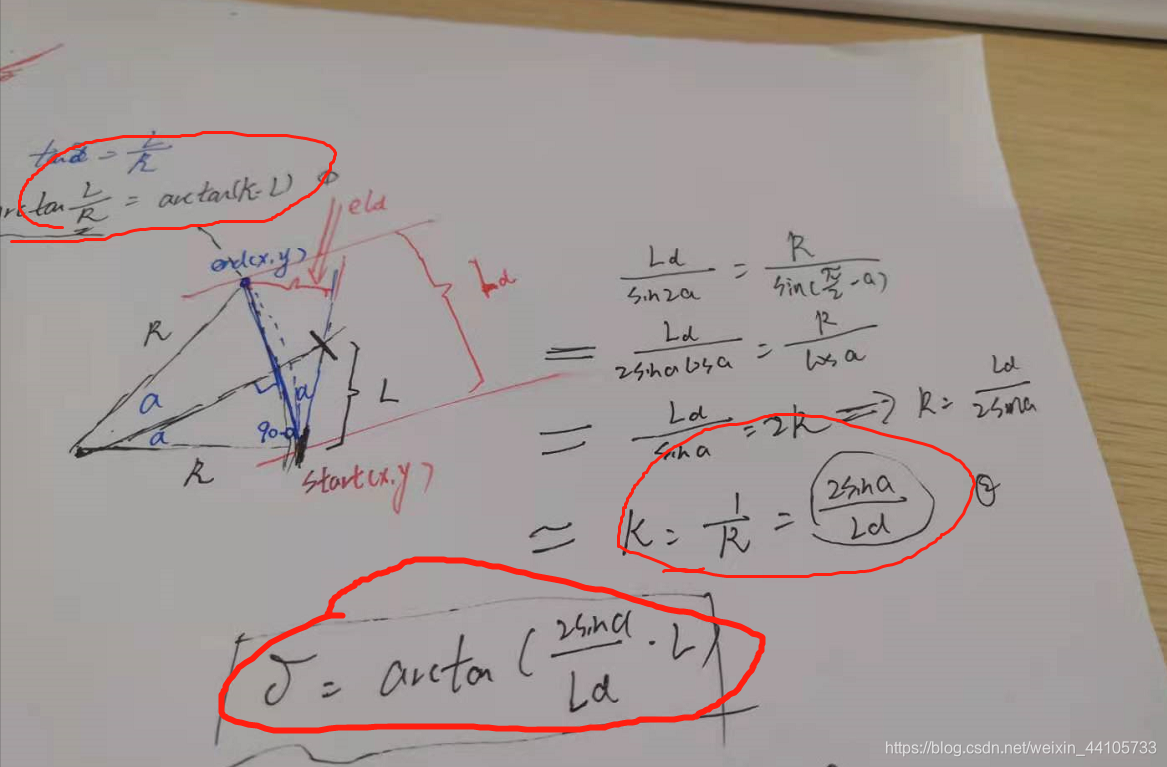
1,这个预瞄的距离 往往和车速成正比,即车速越快,其实我们需要观察的越远。所以公式就可以转化为:
,m就是对应的整定系数。当然,有转弯的情况习惯的驾驶情况是减少观察量,以保证转弯安全,那预瞄的距离是否和曲率成反比?
2,关于这个sina的计算,其实我上图已经标注出来了,就是车轮轴向L的延长线和下一时刻end(x,y)的差值除以对应的预瞄距离。
该算法上没有考虑到跟踪的横向偏差,stanley算法考虑到了这一点,并在05年DARPA Grand Challenge获得第一名。
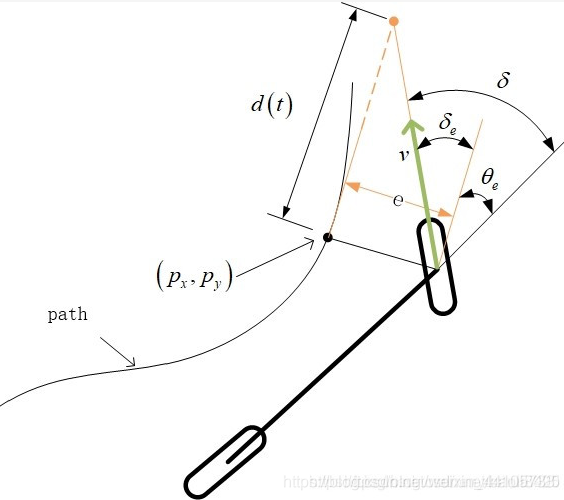
可以看到同样的转角计算,考虑到了两个方面,第一个方面是trajiectory做点切线平移到前轴中点,与车轴线的偏差,还有一方面车辆此刻和参考轨迹的横向偏差e,图上可以看出几何关系,
, 这里的d很明显和速度v成正比关系,也就是代码测试需要整定的就是这部分的关系,也就是
, 到这里第一部分就讲解完了,就是基于实际的模型去分析得到转角的方程去控制。


















 364
364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









