







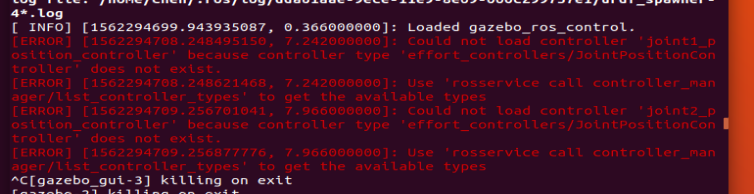
Could not load controller 'joint1_position_controller' because controller type 'effort_controllers/JointPositionController' does not exist.
Failed to load joint1_position_controller
Use 'rosservice call controller_manager/list_controller_types' to get the available types
ERROR: Service [/controller_manager/list_controller_types] is not available.
Controller Spawner couldn't find the expected controller_manager ROS interface
在使用rrbot教程的过程中出现了这些问题,其实都是一样的问题,在使用不同命令的时候出现了这些错误,并且并不会出现教程中的/rrbot/joint1_position_controller/command等话题
使用rospack find effort_controllers的话显示未能发现这个包,于是使用
sudo apt-get install ros-melodic-effort-controllers
来安装effort_controllers(我使用的是ubuntu18.04,ros版本是melodic)
然后问题解决

















 444
444

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









