







文章目录
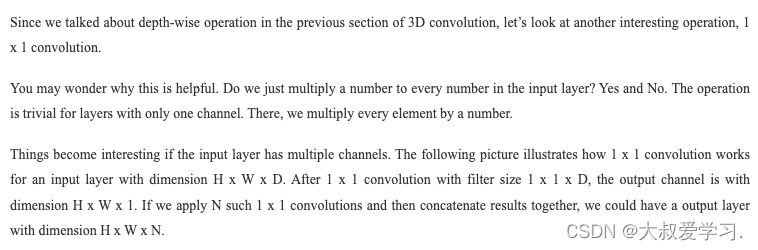
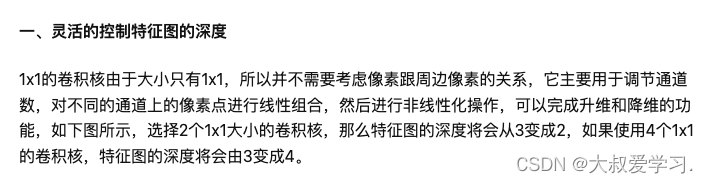
221 1x1 卷积


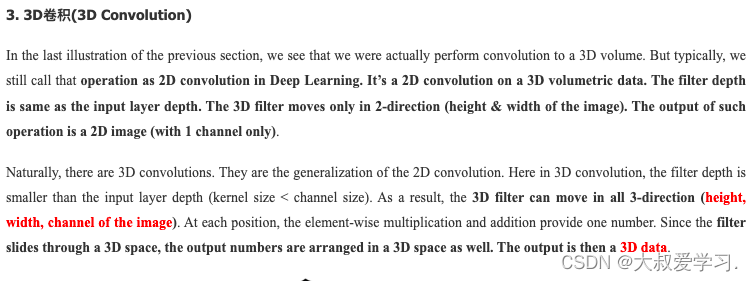
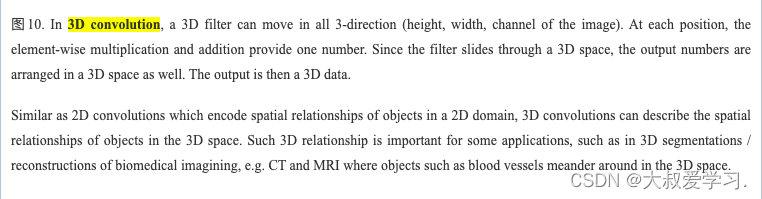
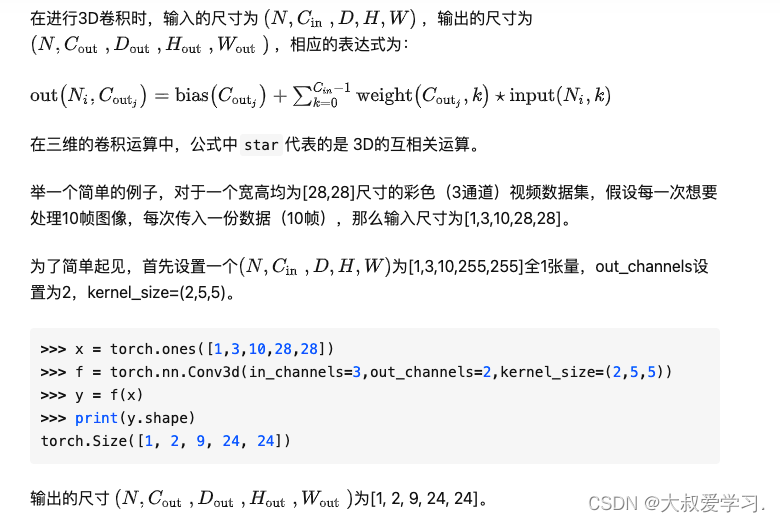
222 3D 卷积
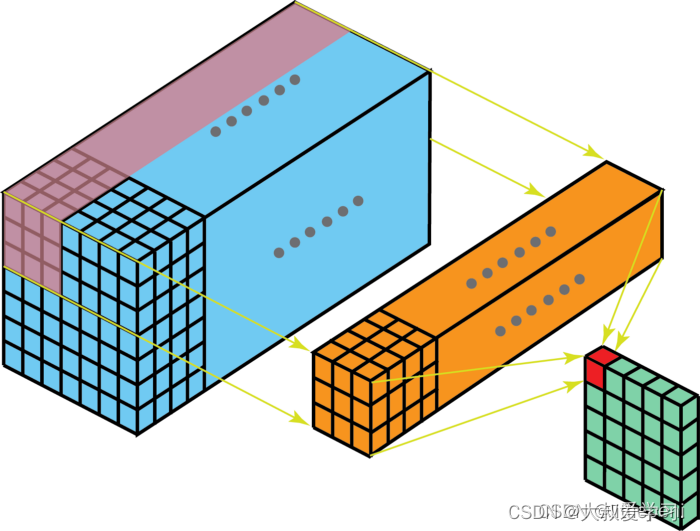
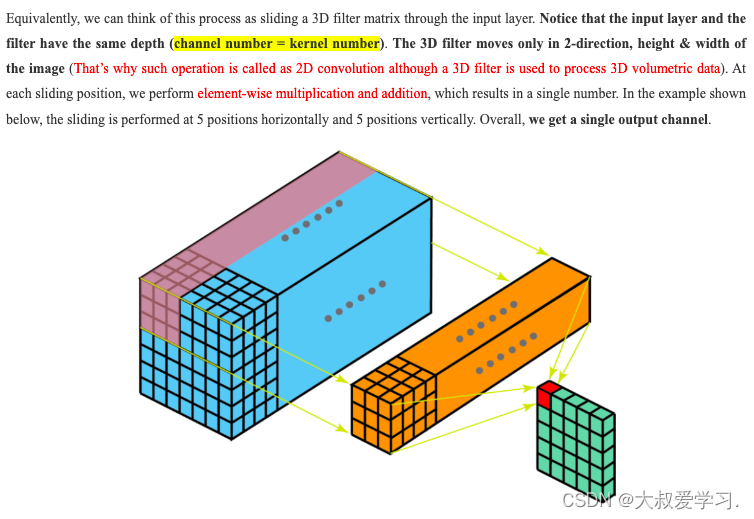
我们可以认为此过程是将3D Filter矩阵滑过输入层。请注意,输入层的通道数和Filter的Kernel数相同。3D Filter 只能在图像的2个方向(高度和宽度)上移动(这就是为什么这种操作被称为2D卷积的原因,尽管3D Filter 用于处理3D体积(高度×宽度×通道数)数据)。在每个滑动位置,我们执行逐元素的乘法和加法运算,结果为单个数字。
在以下示例中,滑动在水平5个位置和垂直5个位置(5=7-3+1)进行。在深度方向上再进行元素相加后,我们得到一个输出通道。
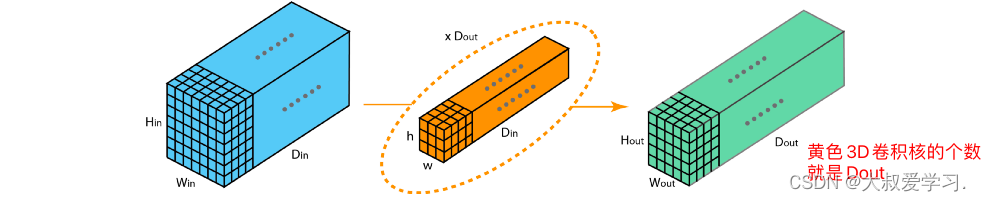
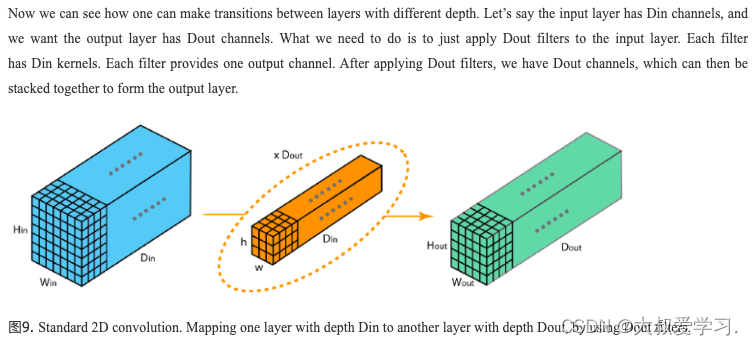
现在我们可以知道如何在不同深度的图层之间进行变换。假设输入层具有Din通道,而我们希望输出层具有Dout通道。我们需要做的只是将Dout 个Filter应用于输入层,每个Filter都有Din个kernel,每个Filter提供一个输出通道。应用Dout个Filter后,我们将拥有Dout个通道,然后可以将它们堆叠在一起以形成输出层。(输出层的Dout个通道也可称为Dout个Feature map,因此输出的Feature map数实际与Convolution Filter的数量相同。)

注意这样的3D卷积由于深度和voxel的深度相同,所以其实是一个在h和w的2D滑动。下面看下当kernal的深度小于voxel的深度的情况:
下面是voxelnet的3D卷积代码:
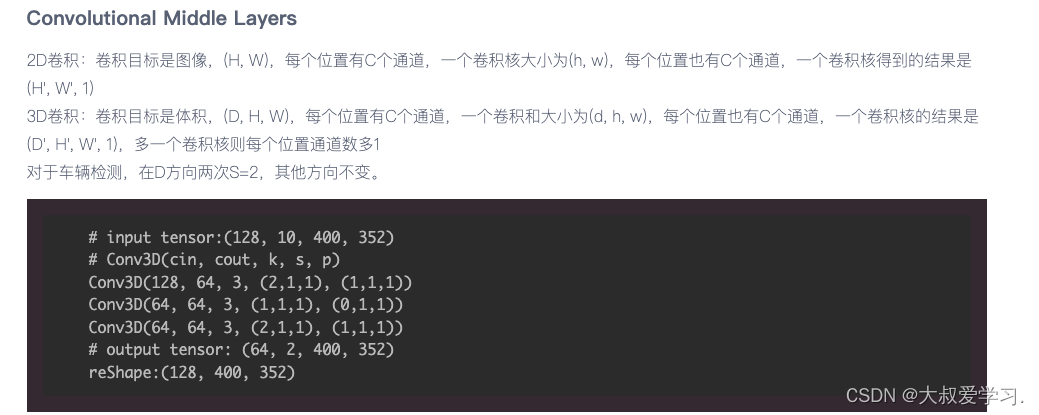
计算过程如图:
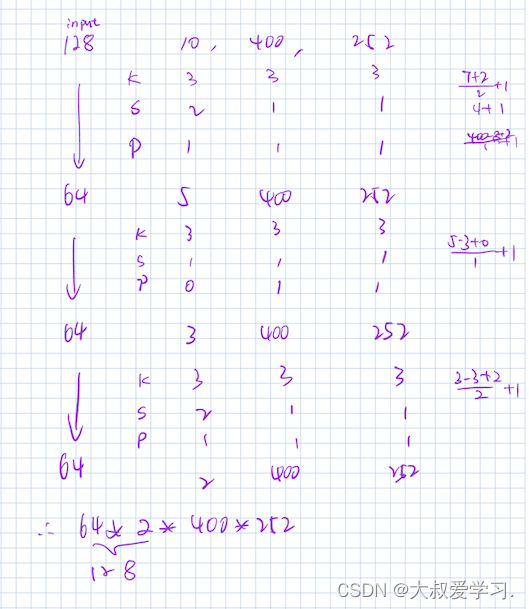
下面2个计算,我看懂了

223 稀疏卷积
本质上就是通过建立哈希表,保存特定位置的计算结果。下文将通过举例说明稀疏卷积的原理。
参考:https://zhuanlan.zhihu.com/p/383299678
https://zhuanlan.zhihu.com/p/262998735
224 空洞卷积
225 反卷积
226 PointNet++中 Ball Query 的动态规划代码写法
227 PointNet 3D IOU怎么计算的
本质上问的是旋转IOU如何计算,是可以转到BEV,但是仍然存在旋转问题,通常使用三角剖分进行解决,目前直接求3D IOU的方法,就是某两个维度上计算IOU然后累加。
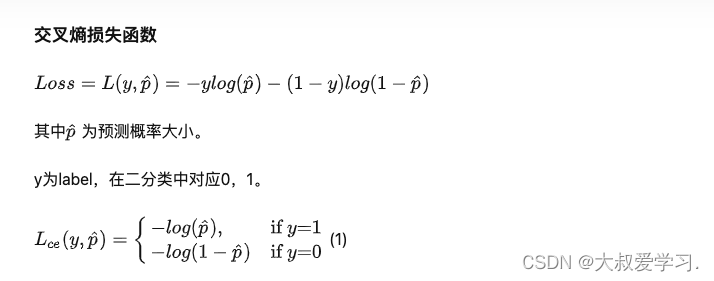
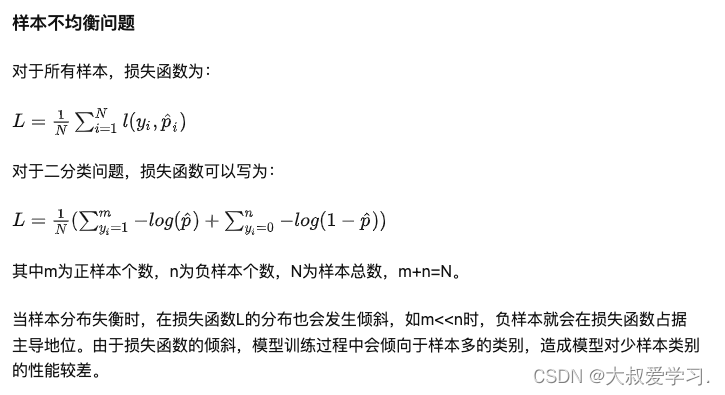
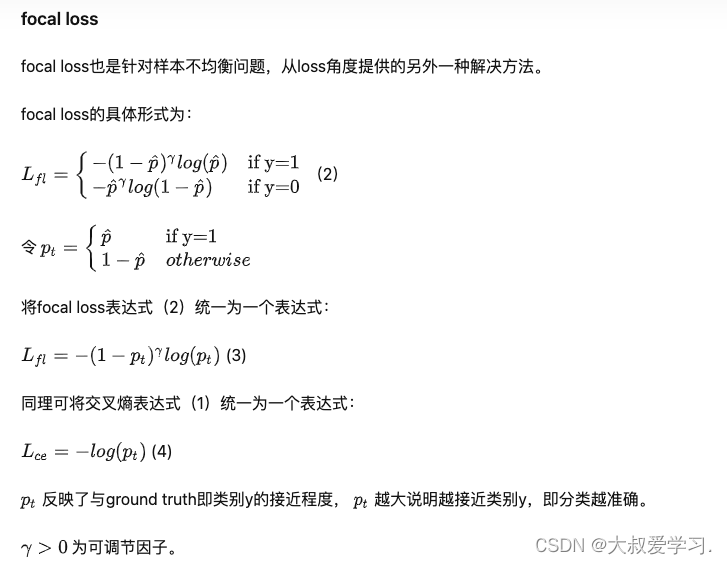
228 Focal Loss
focal loss是最初由何恺明提出的,最初用于图像领域解决数据不平衡造成的模型性能问题。本文试图从交叉熵损失函数出发,分析数据不平衡问题,focal loss与交叉熵损失函数的对比,给出focal loss有效性的解释。
focal loss vs balanced cross entropy
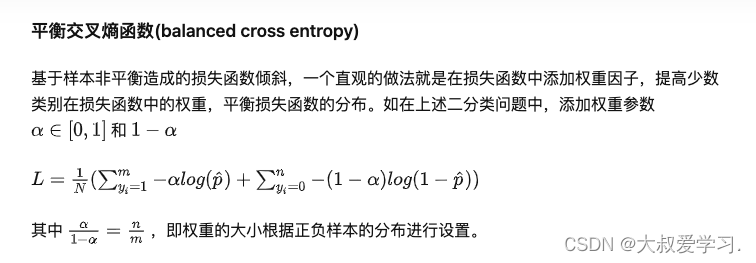
focal loss相比balanced cross entropy而言,二者都是试图解决样本不平衡带来的模型训练问题,后者从样本分布角度对损失函数添加权重因子,前者从样本分类难易程度出发,使loss聚焦于难分样本。
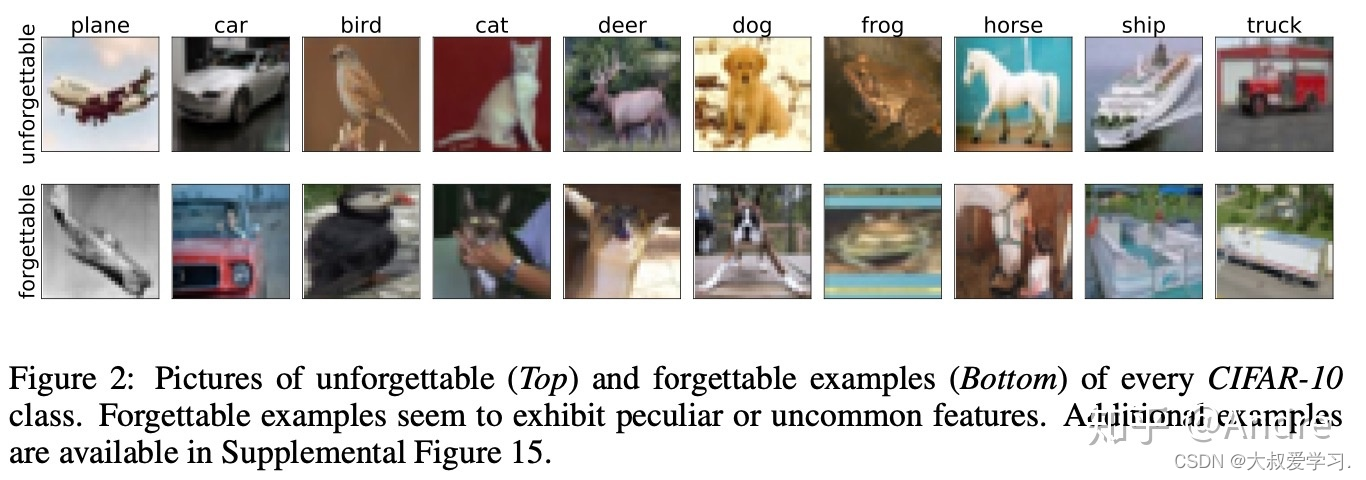
什么是难样本:
“难样本”指的应该是图片本身难以分类的样本,比如上图中的有”uncommon features"的图(即图中出现了对应多个类别的pattern,我称作ambiguous data),但也有可能是信息量不足的图(即由于遮挡等原因,信息量不够,这比较接近OoD data);
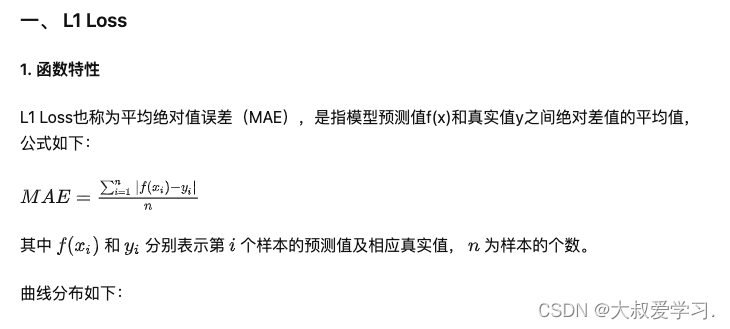
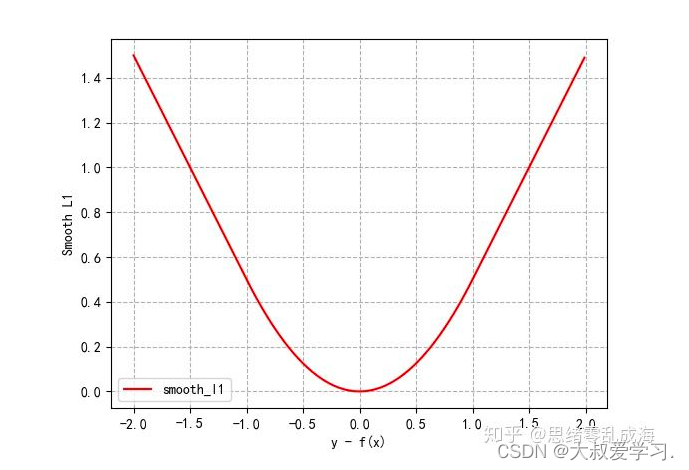
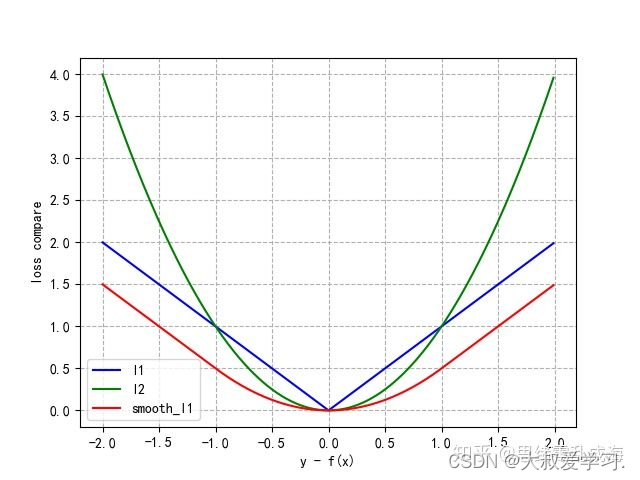
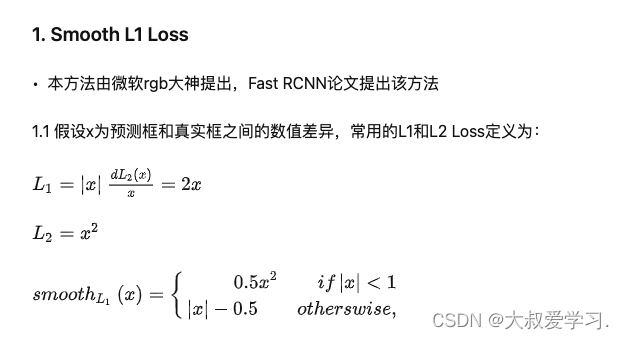
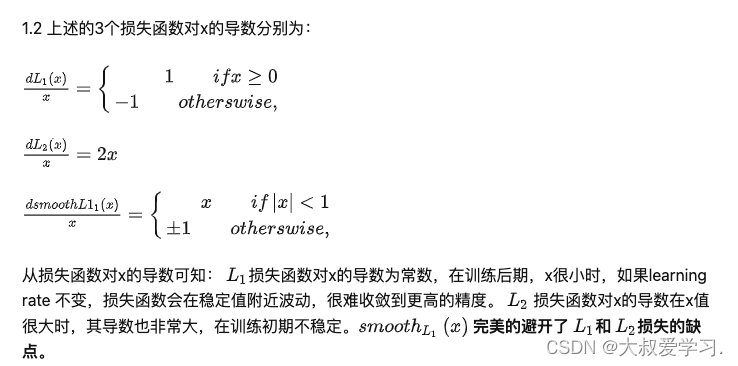
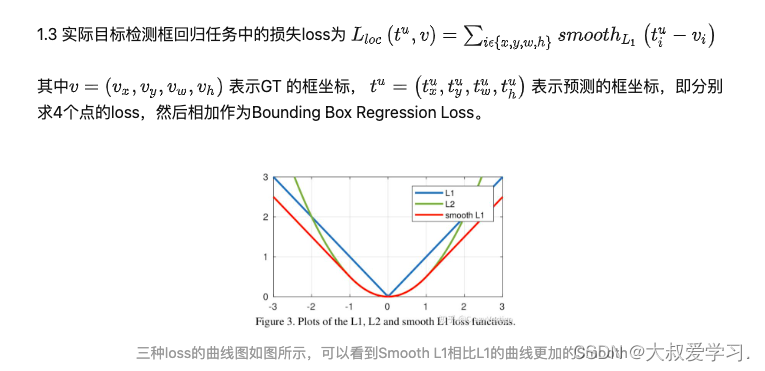
229 目标检测回归损失函数——L1、L2、smooth L1
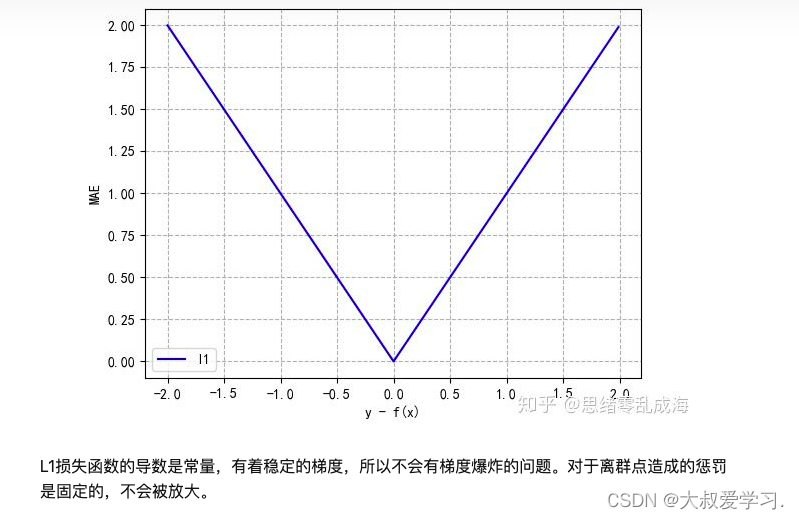
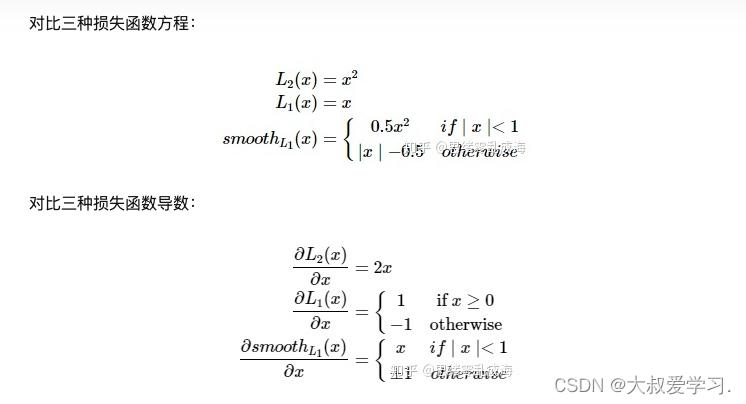
这里smooth l1 x - 0.5的原因是让整个函数在x=1处可以连续。
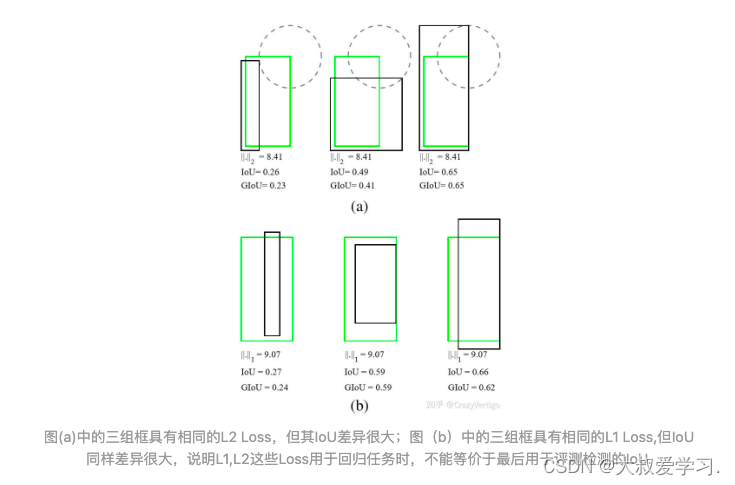
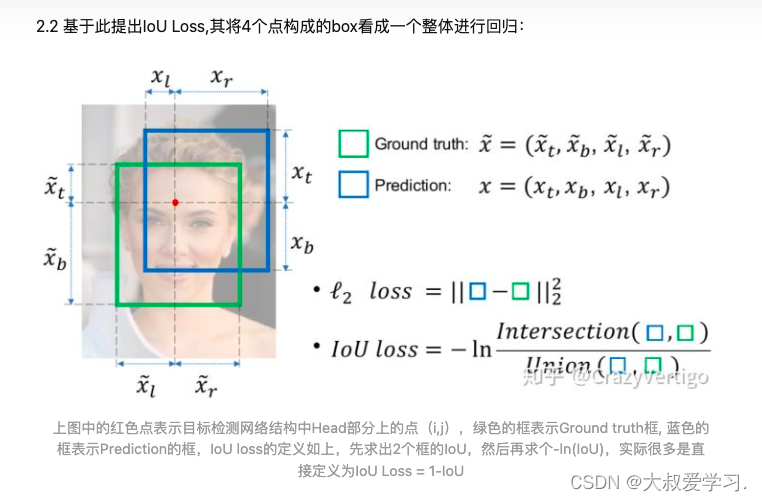
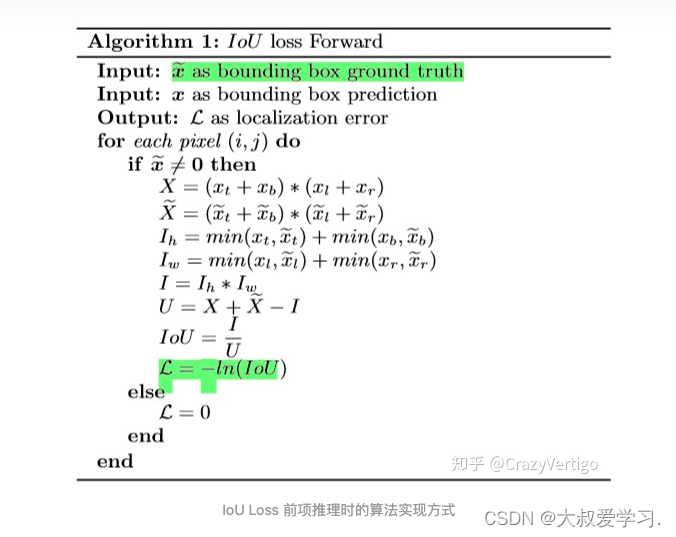
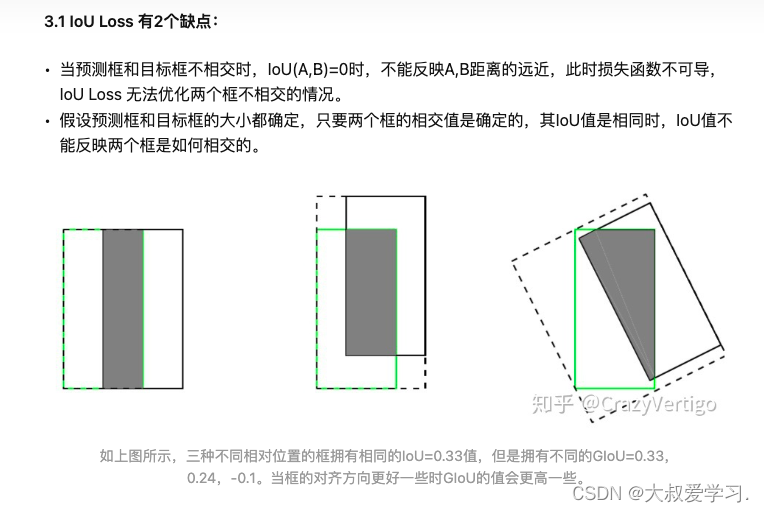
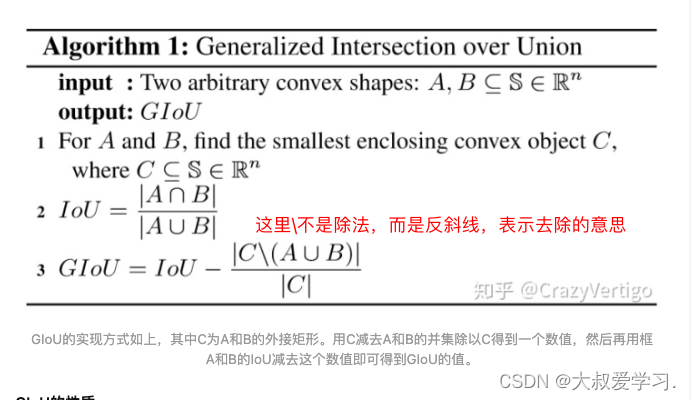
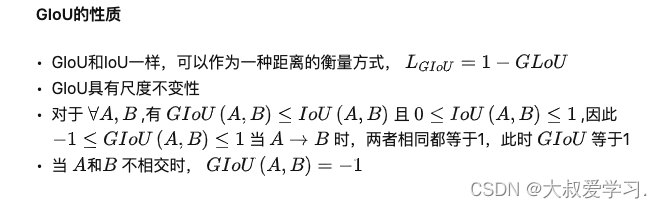
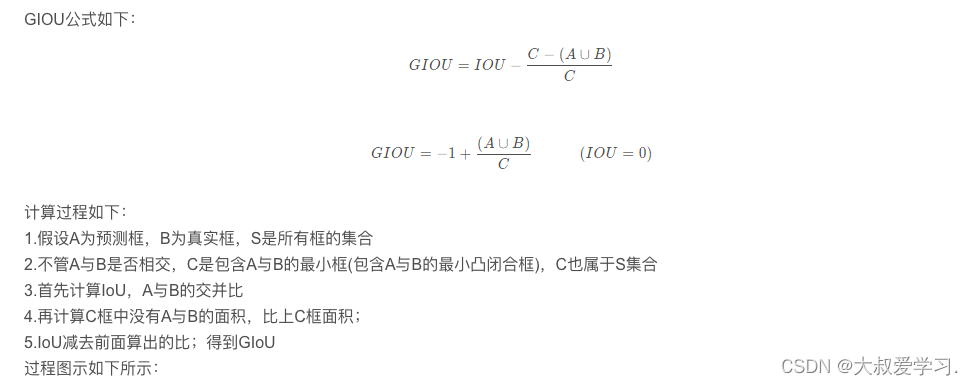
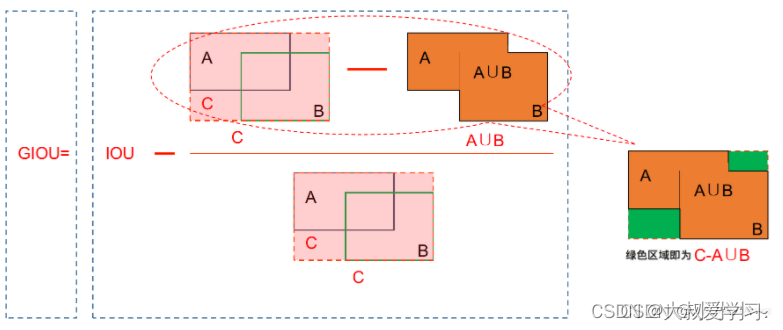
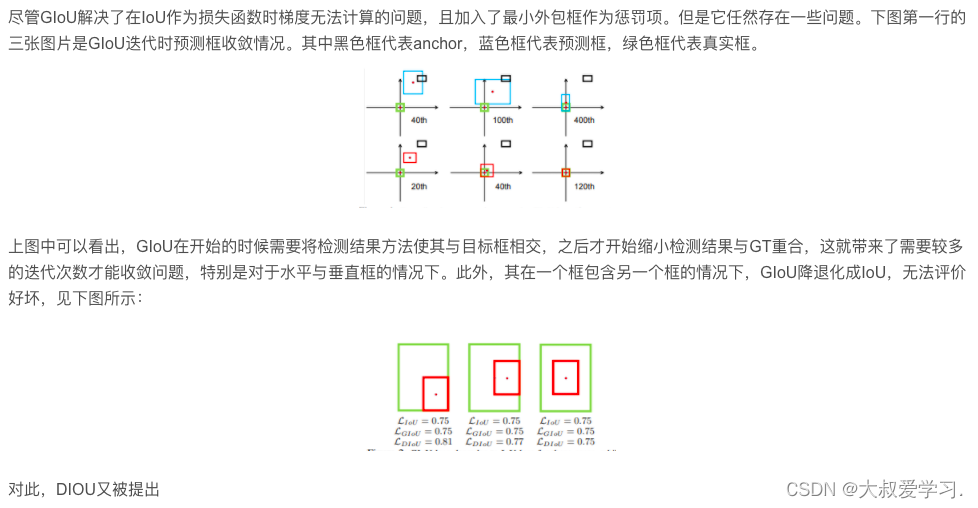
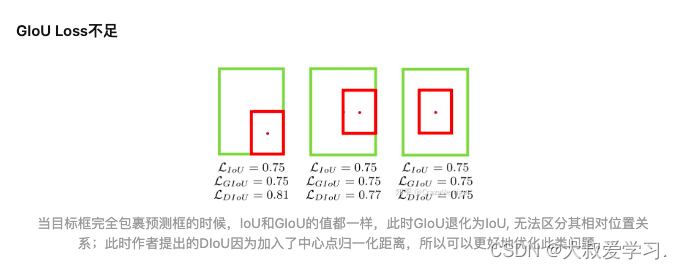
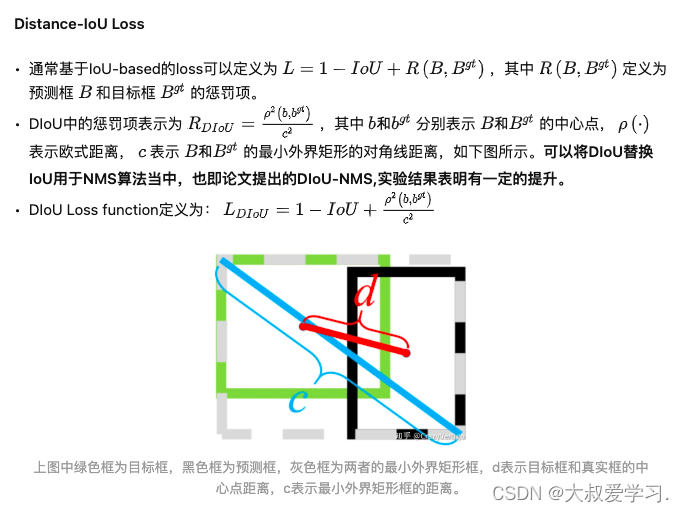
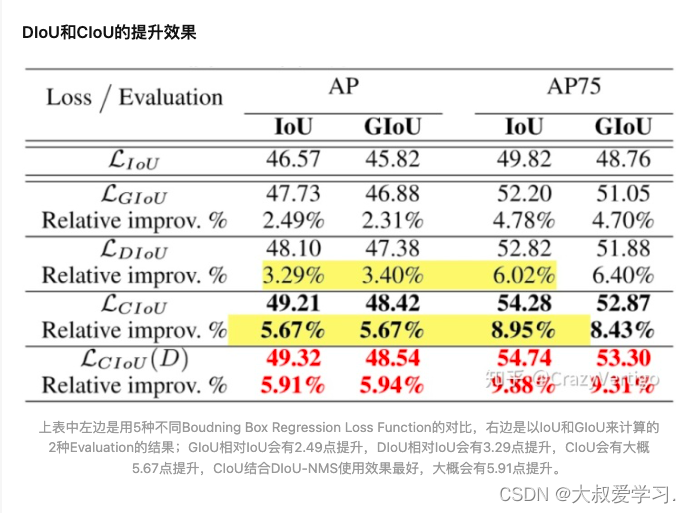
230 目标检测回归损失函数:SmoothL1、IoU、GIoU、DIoU、CIoU Loss




















 2007
2007

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









