







前言
上一篇文章详细解读了论文GoogLeNet网络结构,现在给大家介绍何凯明大神在2016年发表在CVPR的best paper,<Deep Residual Learning for Image Recognition> 开创了深度残差网络的先河,解决了超深层网络训练问题,研究人员不再需要担心随着层数增加而带来的梯度问题,ResNet在2015年ImageNet的图像分类任务中,获得了第一名,并且在top-5错误率上达到了3.57%,大大超过了其他参赛模型。
论文原文:https://arxiv.org/abs/1512.03385
领取100G深度学习资料,500多篇经典论文,论文辅导等请关注作者公众号: 智算学术 回复:资料 领取
前景回顾
LeNet 论文精读 | 深度解析+PyTorch代码复现(上)_yann lecun卷积网络的奠定文章-优快云博客
LeNet 论文精读 | 深度解析+PyTorch代码复现(下)_lenet搭建与mnist训练-优快云博客
AlexNet 论文精读 | 深度解析+PyTorch代码复现 (上)-优快云博客
AlexNet 论文精读 | 深度解析+PyTorch代码复现 (下)-优快云博客
VGG论文精读 | 深度解析+PyTorch代码复现_dense convnet evaluation-优快云博客
GoogleNet论文精读 | 深度解析+PyTorch代码复现-优快云博客
目录
三、Deep Residual Learning—深度残差学习
3.2. Identity Mapping by Shortcuts-通过快捷方式进行身份映射
3.3. Network Architectures-网络架构
Identity vs. Projection Shortcuts—恒等 vs 映射 Shortcuts
Deeper Bottleneck Architectures
4.3. Object Detection on PASCAL and MS COCO—PASCAL和MS COCO上的对象检测
Abstract—摘要
翻译
深度神经网络更难训练。我们提出了一种残差学习框架,以简化比以往更深的网络的训练。我们明确地将每一层重新表述为学习相对于层输入的残差函数,而不是学习无参照的函数。我们提供了大量的实验证据,表明这些残差网络更容易优化,并且可以通过显著增加网络深度来提升准确性。在ImageNet数据集上,我们评估了深度达到152层的残差网络——比VGG网络深8倍,但其复杂度仍然较低。一个这些残差网络的集成在ImageNet测试集上取得了3.57%的错误率。这个结果赢得了2015年ILSVRC图像分类任务的第一名。我们还对CIFAR-10数据集上的100层和1000层网络进行了分析。表示的深度对于许多视觉识别任务至关重要。仅仅因为我们具有极深的表示,我们在COCO物体检测数据集上获得了28%的相对提升。深度残差网络是我们提交到ILSVRC和COCO 2015竞赛的基础,在这些竞赛中,我们还赢得了ImageNet检测、ImageNet定位、COCO检测和COCO分割任务的第一名。
精读
为了解决什么问题 深度神经网络在增加层数时面临训练困难,特别是梯度消失和退化问题,导致更深的网络难以有效优化和训练。
做了什么开创性工作 提出了残差学习框架,通过将每一层转换为学习相对于输入的残差函数,而非直接学习映射函数,极大地简化了深层网络的训练过程。该框架允许网络通过“跳跃连接”来传递信息,避免了梯度消失问题。
有什么效果 通过引入残差学习,深度网络的训练变得更加高效。实验结果表明,ResNet能够训练深达152层的网络,取得了3.57%的错误率,在2015年ILSVRC图像分类任务中获得了第一名。此外,残差网络还在COCO数据集上的物体检测任务中提升了28%的相对准确性,并在多个ILSVRC和COCO竞赛任务中赢得了第一名。
如何理解残差函数?
假设你在做一项任务,任务是将一个箱子从一个地方搬到另一个地方。你知道搬家这个任务有很多步骤,比如搬箱子、整理、清理等等。如果你每次都要记住整个搬家的过程,那么你得花费很多时间,记住所有的细节。而如果你只需要记住你在每个步骤中需要做的“改进”或者“变化”,那样是不是会容易一些?这就像**残差网络**的工作方式。传统的神经网络就像是你需要一步步学习整个搬家过程(也就是整个映射),而**残差网络**则不直接去学习整个过程,而是去学习每一步中需要改变或者“改善”的部分(也就是残差)
说的比较形象就是:老大和小弟要去一个陌生的地方,但是呢?每到一个地方,老大不想走路去探路,让小弟去,小弟探好路回来报告给老大,老大直接按照小弟的指路继续前进!
一、Introduction—介绍
翻译
深度卷积神经网络(DCNN)已经为图像分类等任务带来了一系列突破。深度网络自然地将低、中、高层特征与分类器结合成端到端的多层结构,随着层数的增加(网络深度),特征的“层次”得到了丰富。最近的研究表明,网络深度是非常重要的,许多在挑战性数据集ImageNet上的领先结果都使用了“非常深”的模型,深度从16层到30层不等。其他许多复杂的视觉识别任务也从非常深的模型中受益。
随着深度的重要性被逐渐认识,一个问题随之而来:学习更好的网络是否仅仅通过堆叠更多层就能解决?答案并不简单,因为深度网络存在着梯度消失/梯度爆炸的问题,这些问题会从一开始就妨碍网络的收敛。然而,使用归一化初始化和中间归一化层等方法,已经能有效地解决这个问题,使得数十层的网络可以在反向传播算法(SGD)下开始收敛。
当更深的网络开始收敛时,暴露出一个退化问题:随着网络深度的增加,准确率会逐渐饱和(这可能不奇怪),然后迅速下降。令人意外的是,这种退化并不是由过拟合引起的,增加更多层的深度模型反而会导致更高的训练误差。图1显示了一个典型的例子。
训练准确率的退化表明,并非所有的系统都容易优化。假设我们考虑一个较浅的网络架构和它的深层版本,通过添加更多层来扩展它。实际上可以通过构造解决这个问题:添加的层是恒等映射,其余层是从已训练的浅层模型复制过来的。这个构造解的存在表明,较深的网络不应该比浅层网络产生更高的训练误差。但实验结果显示,现有的求解器在找到比构造解更好的解时往往失败,或者在合理的时间内无法完成。因此,本文提出了一种深度残差学习框架来解决退化问题。
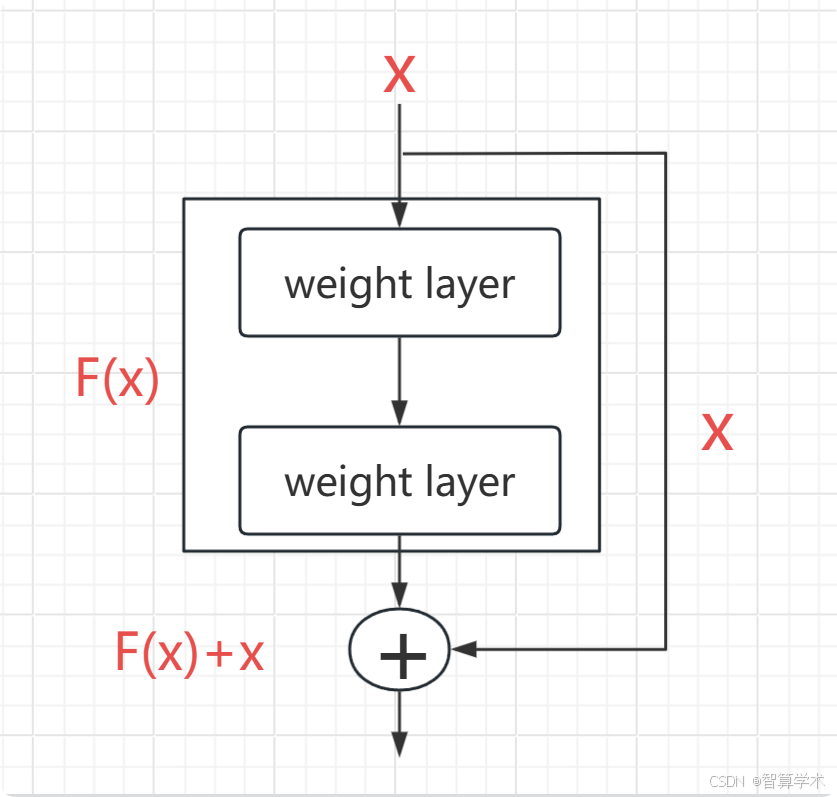
在残差网络中,我们不再希望每个堆叠的几层直接拟合一个目标映射,而是让这些层拟合一个残差映射。形式上,设目标映射为 H(x)H(x)H(x),我们让堆叠的非线性层拟合另一个映射 F(x):=H(x)−xF(x) := H(x) - xF(x):=H(x)−x,即原始映射转化为 F(x)+xF(x) + xF(x)+x。我们假设优化残差映射比直接优化原始的未参考映射更容易。极端情况下,如果恒等映射是最优的,那么将残差推向零比通过一堆非线性层拟合恒等映射要容易。
这种 F(x)+xF(x) + xF(x)+x 的形式可以通过带有快捷连接(shortcut connections)的前馈神经网络来实现。快捷连接是指跳过一层或多层,在我们的网络中,快捷连接执行的是恒等映射,并将其输出加到堆叠层的输出上。恒等快捷连接不会增加额外的参数或计算复杂度。整个网络仍然可以通过反向传播算法使用SGD进行端到端的训练,并且可以使用常见的深度学习库(如Caffe)轻松实现,而无需修改求解器。
我们在ImageNet数据集上进行了全面的实验,展示了退化问题,并评估了我们的方法。实验结果表明:
-
我们的极深残差网络更容易优化,而相应的“普通”网络(直接堆叠层)随着深度增加,训练误差更高;
-
我们的深度残差网络可以从大幅增加的深度中获益,准确率大幅提升,超越了以前的网络。
在CIFAR-10数据集上也观察到了类似的现象,表明我们的优化方法和效果不仅仅适用于特定的数据集。我们成功训练了超过100层的模型,并探索了超过1000层的模型。在ImageNet分类数据集上,我们的152层残差网络是目前在该数据集上提出的最深网络,且其复杂度低于VGG网络。我们的集成模型在ImageNet测试集上的Top-5错误率为3.57%,并赢得了2015年ILSVRC图像分类比赛的第一名。极深的表示还在其他识别任务中表现优异,帮助我们在ILSVRC和COCO 2015竞赛中获得了ImageNet检测、ImageNet定位、COCO检测和COCO分割任务的第一名。
这些强有力的证据表明,残差学习原理具有普适性,我们预计它不仅适用于视觉问题,也适用于其他非视觉问题。
精读
1. 传统的神经网络遇到了什么问题
传统的深度神经网络面临以下几个问题:
-
梯度消失/爆炸问题:随着网络层数的增加,梯度在反向传播时容易消失或爆炸,这会导致训练过程中的收敛困难,特别是在深层网络中。
-
退化问题:尽管网络深度的增加理论上应该提高网络的表达能力,但实际上,随着网络深度的增加,训练准确率反而会先饱和然后迅速下降。这并不是由于过拟合引起的,而是由于深度增加后,优化变得更加困难,导致模型无法有效训练。
-
训练误差增加:在网络层数增加时,传统神经网络的训练误差并没有减少,反而有所增加,说明现有的优化方法难以有效处理深层网络。
2. 怎么解决的
为了应对上述问题,本文提出了残差学习框架,通过以下方式解决:
-
残差学习:通过将每层的目标从学习原始映射转换为学习“残差”映射,网络不再直接拟合目标映射,而是拟合输入与目标之间的差异(残差)。这种方法简化了优化过程,使得训练更加容易。
-
恒等映射(Shortcut Connections):残差网络使用快捷连接(shortcut connections),这些连接将输入直接加到输出上,避免了传统网络中每一层都必须学习复杂映射的问题。恒等快捷连接不会增加额外的参数或计算复杂度,从而使得网络可以更深而不至于出现退化问题。
-
深度残差网络:通过这些设计,网络的深度得以大幅增加,且能保持或提高训练准确度。实验结果表明,深度残差网络不仅解决了退化问题,而且比传统网络能在更大深度下获得更好的性能。
二、Related Work—相关工作
翻译
残差表示:在图像识别中,VLAD(Vector of Locally Aggregated Descriptors)[18]是一种通过与字典的残差向量编码的表示方法,而Fisher向量[30]可以被表述为VLAD的概率版本[18]。它们都是强大的浅层表示,用于图像检索和分类[4, 48]。对于向量量化,编码残差向量[17]被证明比编码原始向量更有效。在低层次视觉和计算机图形学中,为了解决偏微分方程(PDE),广泛使用的多重网格方法[3]将系统重新构造为多个尺度下的子问题,每个子问题负责处理粗尺度和细尺度之间的残差解。多重网格的替代方法是分层基预处理[45, 46],它依赖于表示两个尺度之间残差向量的变量。已有研究表明[3, 45, 46],这些求解器的收敛速度远快于标准求解器,后者未能考虑到解的残差特性。这些方法表明,良好的重构或预处理可以简化优化过程。
快捷链接:早期的实践和理论研究表明,快捷连接[2, 34, 49]已经被研究了很长时间。多层感知机(MLP)训练的一个早期实践是增加一个从网络输入到输出的线性层连接[34, 49]。在[44, 24]中,一些中间层直接连接到辅助分类器,以解决梯度消失/爆炸问题。[39, 38, 31, 47]的论文提出了通过快捷连接来对层响应、梯度和传播误差进行中心化的方法。在[44]中,一个“inception”层由一个快捷分支和几个更深的分支组成。与我们工作同时进行的“highway networks”[42, 43]提出了带有门控函数[15]的快捷连接。与我们使用的恒等快捷连接不同,这些门控是数据依赖的并且有参数。当门控快捷连接“关闭”时(接近零),highway网络中的层表示非残差函数。与此相反,我们的公式始终学习残差函数;我们的恒等快捷连接从不关闭,所有信息始终被传递,并且额外的残差函数会被学习。此外,highway网络在极深层次(例如,超过100层)时并未表现出准确度的提升。
精读
残差表示:(大白话式理解) 在处理图像时,使用“残差”来表示数据比直接使用原始数据更有效。就像做数学题时,把一个复杂问题拆成多个小问题来解决,速度更快。类似地,一些图像处理方法也通过拆解问题,提高了效率。
快捷连接:(大白话式理解) 快捷连接就是直接把输入信息跳过某些层,直接传递到后面的层。这就像是有人给你传递消息时,直接绕过中间的复杂步骤,节省时间。我们的方法是一直让信息传递,不关闭这些跳过的连接,而有些其他方法(如highway网络)则会根据情况来关闭这些连接。但对于非常深的网络(比如超过100层),其他方法没能提高准确率,而我们的做法在这种情况下效果更好。
三、Deep Residual Learning—深度残差学习
3.1. Residual Learning-残差学习
翻译
我们考虑将 H(x)作为一个需要通过几层堆叠的层来拟合的基础映射(不一定是整个网络),其中 x是这些层的输入。如果假设多个非线性层能够渐近地逼近复杂的函数,那么它也等价于假设它们能够渐近地逼近残差函数,即 H(x)−x(假设输入和输出的维度相同)。因此,与其期望堆叠的层直接拟合 H(x),我们显式地让这些层拟合一个残差函数 F(x):=H(x)−x。原始的函数因此变成了 F(x)+x。尽管这两种形式在渐近上应该都能逼近所期望的函数(如假设所述),但学习的难易程度可能不同。这种重构的动机来自于有关退化问题的反直觉现象(图1左)。正如我们在引言中讨论的,如果新增的层可以构建为恒等映射,则更深的模型应该具有不大于其浅层对比模型的训练误差。退化问题表明,求解器可能在通过多个非线性层来逼近恒等映射时遇到困难。通过残差学习的重构,如果恒等映射是最优的,求解器可以简单地将多个非线性层的权重驱动到零,以接近恒等映射。在实际情况下,恒等映射不太可能是最优的,但我们的重构可能有助于对问题进行预处理。如果最优函数更接近恒等映射而非零映射,那么求解器应该更容易找到以恒等映射为参考的扰动,而不是将函数学习为一个全新的函数。通过实验(图7),我们表明学习到的残差函数通常响应较小,这表明恒等映射为预处理提供了合理的基础。
精读
如何理解残差函数?
X 是输入特征矩阵 也就是原始矩阵,在传统的神经网络结构中,直接F(x)+x 进行训练,但是在残差网络中,我另外接了一根线,也就是说 原始矩阵x,它有了选择权,当F(x)训练的参数是垃圾参数或者说是对我们最终的结果起反作用时,原始矩阵x可以选择跳过F(x),这样的话就能保证最起码特征矩阵带的信息不会因为F(x)的垃圾参数的原因丢失信息,也就是说经过变换的特征矩阵接近于恒等于最原始的矩阵,保证了不会因为超深的神经网络因为太深的结构而导致信息丢失
3.2. Identity Mapping by Shortcuts-通过快捷方式进行身份映射
翻译
我们在每几个堆叠的层上采用残差学习。一个基本的残差块如图 2 所示。形式上,在本文中,我们将基本残差块定义为:y = F(x, {Wi}) + x,其中,x 和 y 分别是所考虑层的输入和输出向量。函数 F(x, {Wi}) 代表需要学习的残差映射。例如,在图 2 所示的两层结构中,残差映射为:F = W2σ(W1x),其中,σ 表示 ReLU 激活函数 [29],为了简化符号省略了偏置项。运算 F + x 通过一个快捷连接(shortcut connection)和逐元素加法(element-wise addition)来实现。我们在加法后应用第二个非线性变换(即 σ(y),见图 2)。在公式 (1) 中的快捷连接不会引入额外的参数或计算复杂度。这不仅在实际应用中很有吸引力,而且在对比普通网络和残差网络时尤为重要。这样,我们可以在相同的参数量、深度、宽度和计算成本(除了可以忽略的逐元素加法)下,公平地比较普通网络和残差网络。
在公式 (1) 中,x 和 F 的维度必须相等。如果不相等(例如在改变输入/输出通道数时),我们可以通过快捷连接使用线性投影 Ws 来匹配维度:y = F(x, {Wi}) + Ws x,在公式 (1) 中,我们也可以使用方阵 Ws。但我们通过实验表明,恒等映射(identity mapping)已经足够解决退化问题,并且更具计算经济性,因此 Ws 仅用于匹配维度。
残差函数 F 的形式是灵活的。在本文的实验中,F 包含两层或三层(见图 5),但也可以使用更多层。然而,如果 F 只有一层,公式 (1) 变为:y = W1 x + x,在这种情况下,我们并未观察到性能上的优势。此外,尽管上述符号是针对全连接层的,但同样适用于卷积层。函数 F(x, {Wi}) 可以表示多个卷积层,并且逐元素加法是在两个特征图上按通道进行的。
精读
残差块是怎么设计的?
一个 残差块(Residual Block) 就是多个神经网络层的组合,并且有一个「快捷连接(Shortcut Connection)」直接把输入 x 传递到输出 y,公式如下:y = F(x, {Wi}) + x
其中:
-
F(x, {Wi})代表要学习的残差映射,通常由几层神经网络组成(比如W2σ(W1x),即两层带 ReLU 的全连接层)。 -
F + x通过「快捷连接」进行逐元素加法(element-wise addition)。 -
计算完
y之后,还会再加一个非线性激活函数(比如 ReLU)
如果输入和输出的维度不匹配怎么办? 可以用一个 线性投影(Ws) 来调整维度,比如:y = F(x, {Wi}) + Ws X ,就是调整一下 x 的输入维度,来和F(x)的尺寸适配后,好做加和计算
3.3. Network Architectures-网络架构
翻译
我们测试了多种普通网络(plain nets)和残差网络(residual nets),并观察到了一些一致的现象。为了便于讨论,我们描述了两个在 ImageNet 上的模型如下。
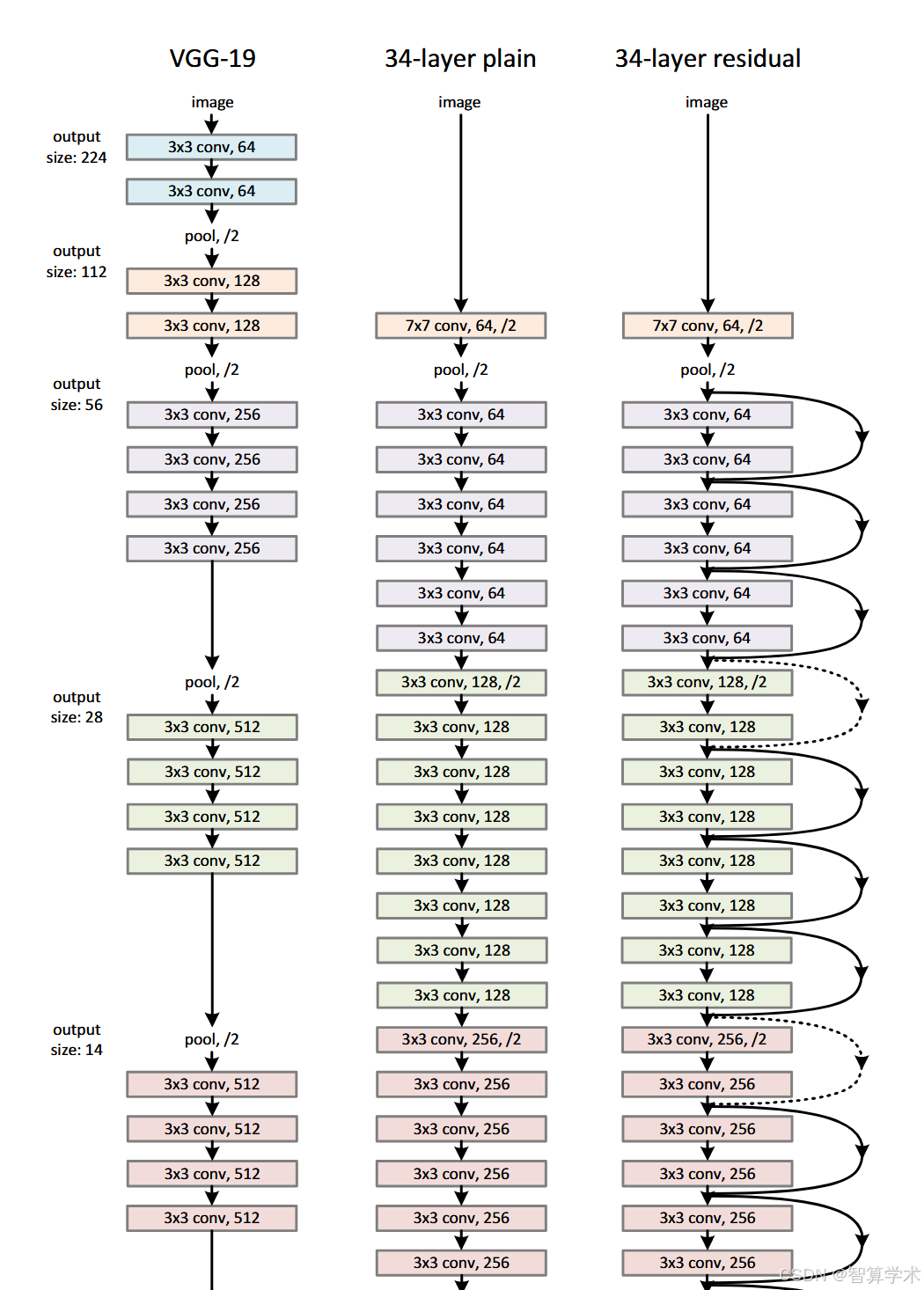
普通网络:我们的普通网络基线(图 3 中间)主要受到 VGG 网络 [41](图 3 左侧)设计理念的启发。卷积层主要采用 3×3 的卷积核,并遵循以下两个简单的设计规则:
-
对于相同的输出特征图尺寸,使用相同数量的滤波器(filters)。
-
当特征图尺寸减半时,滤波器数量加倍,以保持每层的计算复杂度不变。
为了进行下采样(downsampling),我们直接使用步长(stride)为 2 的卷积层。网络的最后一层是全局平均池化层(Global Average Pooling),接着是一个 1000 维全连接层(Fully Connected Layer)和 Softmax 层。
该网络的总权重层数为 34 层(见图 3 中间)。值得注意的是,相比 VGG 网络(图 3 左),我们的模型使用更少的滤波器,计算复杂度更低。我们的 34 层普通网络计算量为 3.6G FLOPs(乘加运算次数),仅为 VGG-19(19.6G FLOPs)的 18%。
残差网络:基于上述普通网络,我们加入了快捷连接(Shortcut Connections)(见图 3 右侧),将其转换为残差网络。
当输入和输出维度相同时(图 3 中的实线快捷连接),我们可以直接使用恒等映射(Identity Mapping),即公式(1):y = F(x, {Wi}) + x,当维度发生变化时(图 3 中的虚线快捷连接),我们考虑以下两种方案:
-
方案 A:仍然使用恒等映射,但用额外的零填充(zero-padding)来匹配更高的维度。这种方法不会引入额外的参数。
-
方案 B:使用公式(2)中的投影映射(Projection Shortcut),通过 1×1 卷积来匹配维度:y = F(x, {Wi}) + Ws x,对于以上两种方案,当快捷连接跨越不同尺寸的特征图时,我们采用步长(stride)= 2 进行计算。
精读
-
普通网络(Plain Network)
-
这个网络的设计灵感来源于VGG网络,采用的卷积核大多数是3x3的,设计上有两个简单的规则:
-
如果输出的特征图尺寸相同,网络的每一层卷积的滤波器(卷积核)的数量也相同。
-
如果特征图的尺寸减半,那卷积的滤波器数量就会翻倍,保持每一层计算量差不多。
-
-
通过卷积层进行下采样(图像尺寸缩小),最后加一个全局平均池化层和一个1000类的全连接层进行分类。
-
和VGG网络相比,这个普通网络的滤波器数量更少,复杂度更低。
-
-
残差网络(Residual Network)
-
在普通网络的基础上,增加了shortcut连接,形成了残差网络。
-
输入和输出维度相同时,可以直接使用恒等映射(就是直接把输入加到输出上,不做其他改动),这种连接方式没有增加额外的参数。
-
当维度增加时,有两种处理方式:
-
方式A:依然使用恒等映射,只是通过填充零来调整维度,避免了新增参数。
-
方式B:使用投影shortcut,利用1x1的卷积来调整维度。
-
-
对于不同尺寸的特征图,shortcut连接会以步幅2来进行处理。
-
总结: ResNet的核心思想就是通过shortcut连接(也叫残差连接)来解决深层网络训练时的“退化问题”。也就是说,深层网络的表现可能因为层数过多而变得不如浅层网络,但残差连接可以让每一层网络学习到一个“残差”,而不是直接去学习一个完整的输出。这样,网络不仅能加深,而且还能保持或者提高性能,同时减少计算复杂度。
3.4. Implementation-实现
翻译
我们的ImageNet实现遵循了[21, 41]中的做法。图像会根据较短边随机调整尺寸,范围在[256, 480]之间,以进行尺度增强[41]。然后从图像中随机裁剪出224×224的区域,或者进行水平翻转,并减去每个像素的均值[21]。我们使用了[21]中的标准颜色增强方法。在每个卷积层后和激活函数前,我们都采用批量归一化(BN)[16]。我们按[13]中的方法初始化权重,并从头开始训练所有的plain/residual网络。我们使用小批量大小为256的SGD。学习率从0.1开始,当误差停滞时,学习率除以10,模型训练最多进行60 × 10^4次迭代。我们使用0.0001的权重衰减和0.9的动量。我们不使用dropout[14],遵循[16]中的做法。在测试时,为了进行比较研究,我们采用标准的10裁剪测试[21]。为了获得最佳结果,我们采用了[41, 13]中的全卷积形式,并在多个尺度下平均得分(图像的短边调整为{224, 256, 384, 480, 640}中的某个值)。
精读
-
数据增强:
-
图像的短边会被随机调整大小,范围在256到480之间,用于尺度增强。
-
从调整后的图像中随机裁剪出224×224的区域,或者进行水平翻转。
-
在每个像素上减去其均值,以进行标准化处理。
-
-
批量归一化(Batch Normalization):
-
在每个卷积层后面加上批量归一化,归一化操作在激活函数前进行,以加速训练和提高稳定性。
-
-
权重初始化:
-
所有的权重初始化方法遵循特定的规则(参考文献中提到的方法)。
-
-
训练策略:
-
使用SGD(随机梯度下降)优化器,批量大小为256。
-
初始学习率为0.1,当误差不再下降时,学习率会降低10倍。
-
模型训练总共进行60万次迭代。
-
使用权重衰减(0.0001)和动量(0.9)来防止过拟合。
-
-
未使用Dropout:
-
根据参考文献中的方法,没有使用dropout。
-
-
测试时的标准方法:
-
使用标准的10裁剪方法进行测试,确保多个裁剪结果能够反映模型的准确性。
-
-
多尺度测试:
-
为了获得最佳结果,采用了多尺度方法:将图像调整为不同尺寸(224、256、384、480、640),并对多个尺度的结果进行平均。
-
总结来说,模型训练通过数据增强、批量归一化、权重初始化、适当的优化策略、以及多尺度测试等手段来确保更好的训练效果和预测性能。
四、Experiments--实验
4.1. ImageNet Classification
翻译
我们在ImageNet 2012分类数据集[36]上评估了我们的方法,该数据集包含1000个类别。模型在128万张训练图像上进行训练,在5万张验证图像上进行评估。最终结果是在10万张测试图像上得出的,由测试服务器报告。我们评估了top-1和top-5错误率。
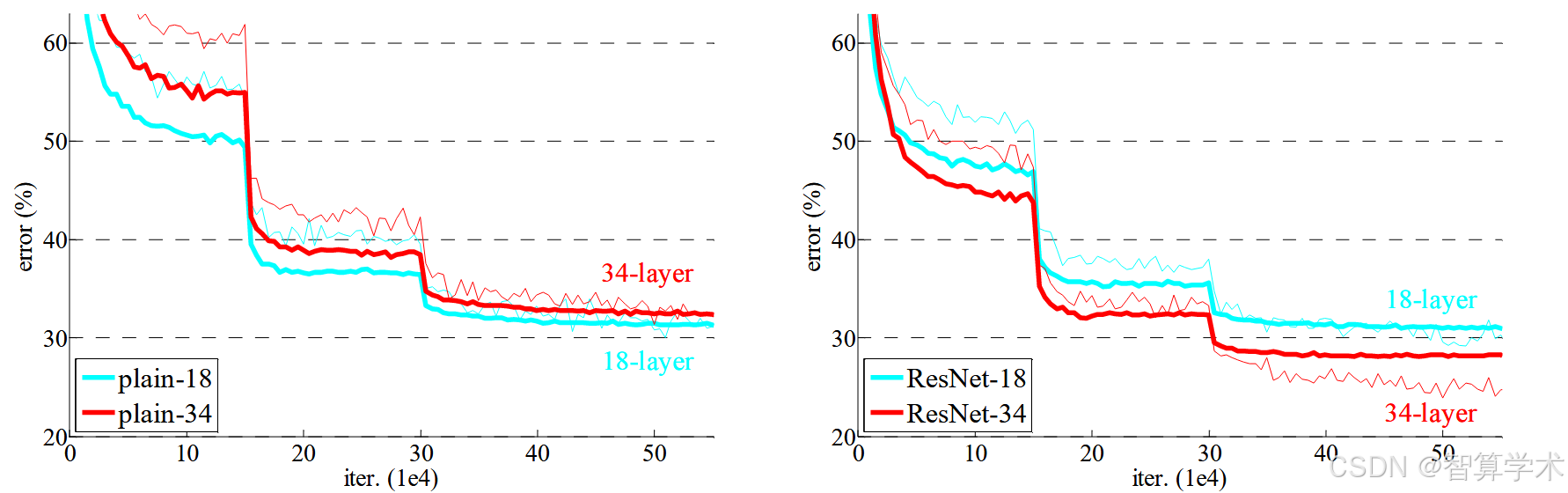
Plain网络 我们首先评估了18层和34层的plain网络。34层的plain网络如图3(中)所示,18层的plain网络与其结构类似。具体架构详见表1。表2的结果显示,深层的34层plain网络的验证错误率高于较浅的18层plain网络。为了揭示原因,在图4(左)中,我们比较了它们在训练过程中的训练/验证误差。我们观察到了退化问题——即使18层plain网络的解空间是34层plain网络的子空间,34层plain网络在整个训练过程中训练误差始终较高。我们认为,这种优化困难不太可能是由于梯度消失导致的。这些plain网络是使用BN[16]训练的,BN确保了前向传播的信号具有非零方差。我们还验证了反向传播的梯度也有健康的范数,说明前向和反向信号都没有消失。事实上,34层plain网络仍然能够达到具有竞争力的准确率(表3),表明求解器在某种程度上是有效的。我们推测,深层plain网络可能有非常低的收敛速度,这影响了训练误差的减少。我们将在未来研究这种优化困难的原因。
Residual网络 接下来,我们评估了18层和34层的Residual网络(ResNet)。基础架构与上述plain网络相同,只是在每对3×3卷积层中添加了shortcut连接,如图3(右)所示。在第一次比较中(表2和图4右),我们对所有shortcut使用了身份映射,并对维度增加进行了零填充(选项A)。因此,它们与plain网络相比没有额外的参数。
从表2和图4中我们得出三个主要观察结果。首先,使用残差学习的情况有所逆转——34层ResNet比18层ResNet表现更好(提高了2.8%)。更重要的是,34层ResNet展示了显著较低的训练误差,并且能够更好地推广到验证数据。这表明,退化问题在这种设置下得到了有效解决,我们通过增加深度获得了准确度的提升。其次,与plain网络相比,34层ResNet将top-1错误率减少了3.5%(表2),这得益于训练误差的成功减少(图4右 vs. 左)。这个比较验证了残差学习在极深网络中的有效性。最后,我们还注意到,18层的plain/residual网络在准确性上相当接近(表2),但18层ResNet收敛速度更快(图4右 vs. 左)。当网络不是“过深”时(此处是18层),当前的SGD求解器仍然能够为plain网络找到好的解。在这种情况下,ResNet通过提供更快的收敛速度,在训练的早期阶段缓解了优化问题。
精读
讨论了在ImageNet数据集上评估不同深度的Plain网络和Residual网络(ResNet)表现的实验结果。
-
Plain网络:
-
研究了18层和34层的plain网络。34层网络比18层网络深,但是发现34层网络的训练误差比18层高,表现不如18层。虽然两者的解空间有重叠,但34层网络仍然难以训练,可能是因为它们收敛得非常慢,导致训练误差难以下降。
-
由于使用了Batch Normalization(BN),前向和反向的信号没有消失,梯度也正常。这个训练困难可能并非由于梯度消失,而是因为深度增加导致网络优化变得更加困难。
-
-
Residual网络(ResNet):
-
引入shortcut连接(残差连接)后,34层的ResNet比18层的ResNet表现更好,训练误差显著降低,模型也能更好地推广到验证数据集。
-
使用残差学习后,34层的ResNet比18层ResNet减少了更多的错误(top-1误差减少了3.5%)。这表明,使用残差学习的网络可以有效解决深层网络的退化问题,且通过增加深度能够提升性能。
-
当网络深度相对较浅(18层)时,ResNet能够更快地收敛,比plain网络更有效。
-
总结:Residual网络(ResNet)通过引入shortcut连接,解决了深层网络的退化问题,使得更深的网络能够有效训练,并且在测试中取得了更好的结果。
Identity vs. Projection Shortcuts—恒等 vs 映射 Shortcuts
翻译
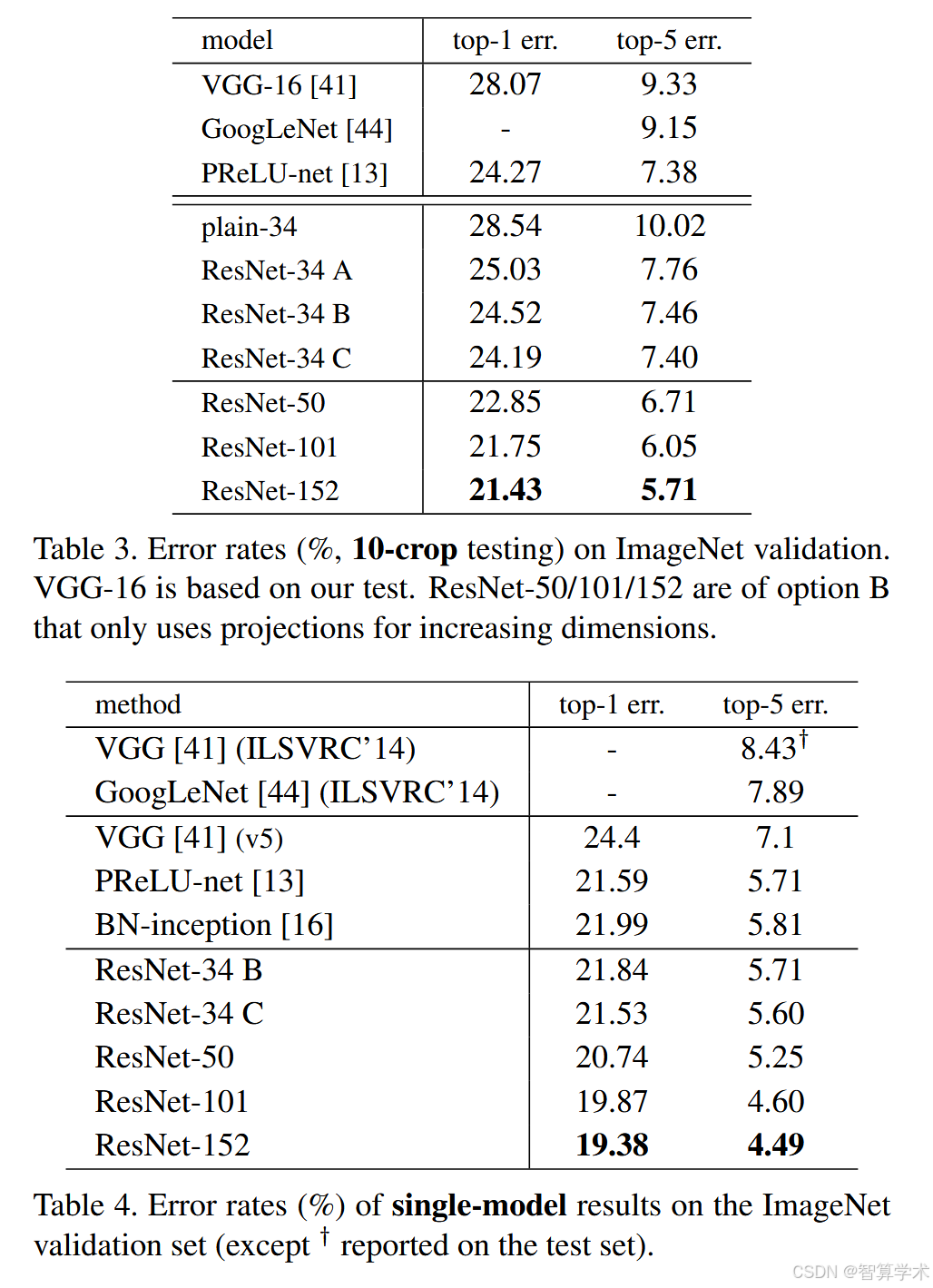
我们已经展示了无参数的恒等快捷连接有助于训练。接下来,我们研究了投影快捷连接(公式(2))。在表3中,我们比较了三种选项:(A)对于增加维度的情况,使用零填充快捷连接,所有快捷连接都是无参数的(与表2和图4右侧相同);(B)对于增加维度的情况,使用投影快捷连接,其他快捷连接为恒等连接;(C)所有的快捷连接都是投影连接。表3显示,这三种选项都比普通的网络有显著的提升,选项B稍微优于选项A。我们认为这是因为在选项A中,零填充的维度没有残差学习。选项C稍微优于选项B,我们认为这是由于引入了多个(十三个)投影快捷连接,增加了额外的参数。但选项A/B/C之间的小差异表明,投影快捷连接对于解决退化问题并非必须。因此,在本文其余部分我们不使用选项C,以减少内存/时间复杂度和模型大小。恒等快捷连接在不增加瓶颈架构复杂度方面尤其重要,下面将介绍这种架构。
精读
在这部分,作者比较了三种不同类型的快捷连接(shortcut connections):
-
零填充快捷连接(选项A):当网络维度增加时,使用零填充来补充新的维度,这样没有额外的学习参数。
-
投影快捷连接(选项B):对于增加维度的部分,使用投影(即使用1×1卷积)来调整维度,其他地方仍然使用恒等连接。
-
全部投影快捷连接(选项C):所有的维度都通过卷积核(即使用1×1卷积)来进行调整。
实验结果表明,三种选项都比普通网络(没有任何快捷连接)要好。具体来说,选项B(部分投影快捷连接)比选项A(零填充快捷连接)稍微好一点,因为零填充并没有实现任何实际的残差学习。而选项C(全部投影快捷连接)略微优于选项B,但差别不大,主要是因为选项C引入了更多的参数,导致模型变得更加复杂。
通过这些比较,作者得出结论:虽然投影快捷连接能进一步提升性能,但对于解决“退化问题”来说并非必须。因此,在后续的研究中,作者选择不使用选项C,以减少模型的复杂度(如内存和计算量),并保持恒等快捷连接的优势,尤其是在处理一些复杂网络结构时,恒等快捷连接有助于避免增加计算复杂度。
Deeper Bottleneck Architectures
翻译
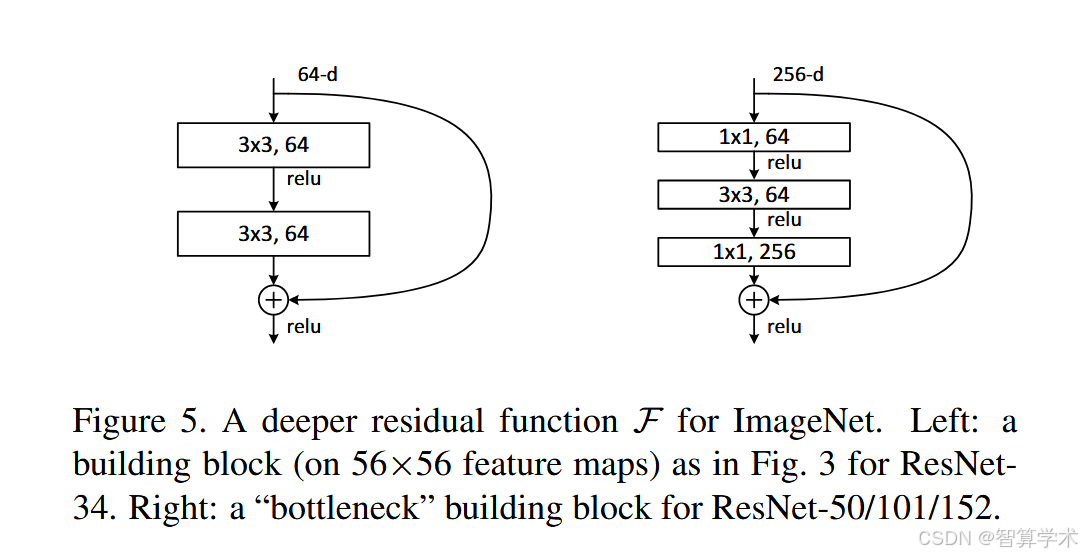
接下来,我们描述了针对ImageNet的更深网络。考虑到训练时间的限制,我们将构建块修改为瓶颈设计。对于每个残差函数F,我们使用一个由三层堆叠组成的结构,而不是两层(见图5)。这三层分别是1×1、3×3和1×1的卷积,其中1×1层负责减少和恢复维度,而3×3层则作为瓶颈,具有较小的输入/输出维度。图5展示了一个例子,其中两种设计具有相似的时间复杂度。参数无关的身份快捷方式对瓶颈架构尤其重要。如果将图5(右)中的身份快捷方式替换为投影,时间复杂度和模型大小将翻倍,因为快捷方式连接到两个高维的端点。因此,身份快捷方式使得瓶颈设计的模型更加高效。
50层ResNet:我们将34层网络中的每个2层块替换为这个3层的瓶颈块,从而得到了50层的ResNet(见表1)。我们使用选项B来增加维度。该模型有38亿FLOP。
101层和152层ResNet:通过使用更多的3层块,我们构建了101层和152层的ResNet(见表1)。值得注意的是,尽管深度大幅增加,但152层的ResNet(113亿FLOP)仍然比VGG-16/19网络(分别为153亿/196亿FLOP)的复杂度低。50/101/152层的ResNet在准确性上都显著优于34层网络(见表3和表4)。我们没有观察到退化问题,因此从大幅增加的深度中获得了显著的准确性提升。在所有评估指标中,深度的优势都得到了体现(见表3和表4)。
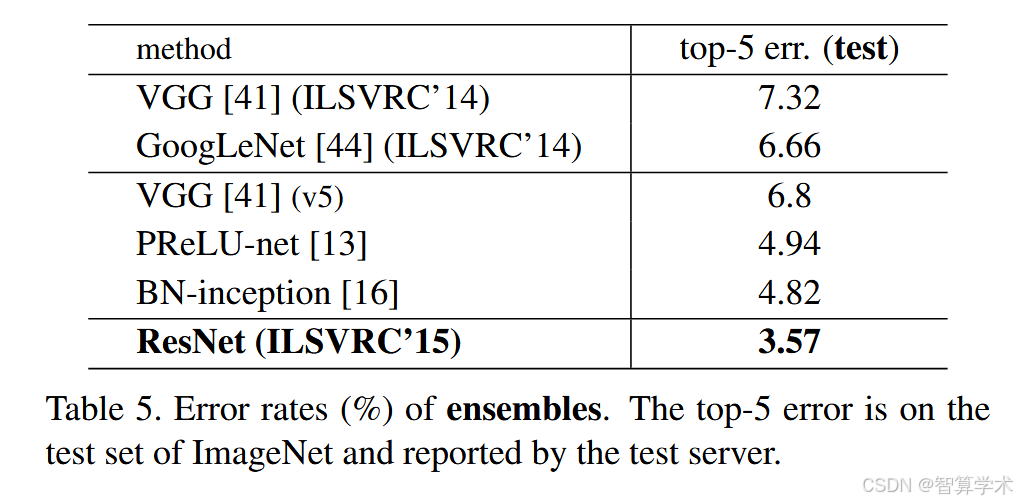
与最先进方法的比较:在表4中,我们与之前最佳的单模型结果进行了比较。我们的34层ResNet基线模型已经达到了非常有竞争力的准确性。我们的152层ResNet在验证集上的单模型top-5错误率为4.49%。这个单模型结果超越了所有之前的集成结果(见表5)。我们将六个不同深度的模型进行集成(提交时只包含两个152层的模型)。这使得测试集上的top-5错误率达到了3.57%(见表5)。该成绩在2015年ILSVRC中获得了第一名。
精读
瓶颈设计:为了优化训练时间,采用了瓶颈设计,即每个残差模块由三层卷积层组成:1×1、3×3、1×1。1×1卷积层负责减小和恢复维度,3×3卷积层则是瓶颈,减少输入和输出的维度,提升计算效率。
网络深度增加:通过将34层ResNet的2层模块替换为3层瓶颈设计,得到了50层ResNet。更深的网络包括101层和152层ResNet,尽管深度增加,152层的ResNet仍比VGG-16和VGG-19的复杂度低。
减少计算负担:瓶颈设计有效地减少了计算复杂度,使得深度更大的网络在计算上更高效。
提升准确率:50层、101层和152层ResNet相较于34层网络,在准确性上有显著提升,且没有出现退化问题。
152层ResNet表现:152层ResNet在验证集上的top-5错误率为4.49%,超过了所有以前的集成模型。
集成模型:他们将六个不同深度的ResNet模型组合成一个集成模型,达到了3.57%的top-5错误率,获得了2015年ILSVRC比赛的第一名。
结论:通过优化深度和瓶颈设计,成功解决了深度增加带来的训练问题,显著提升了模型的准确性,并在图像分类任务中获得了优秀的成绩。
4.2. CIFAR-10 and Analysis
翻译
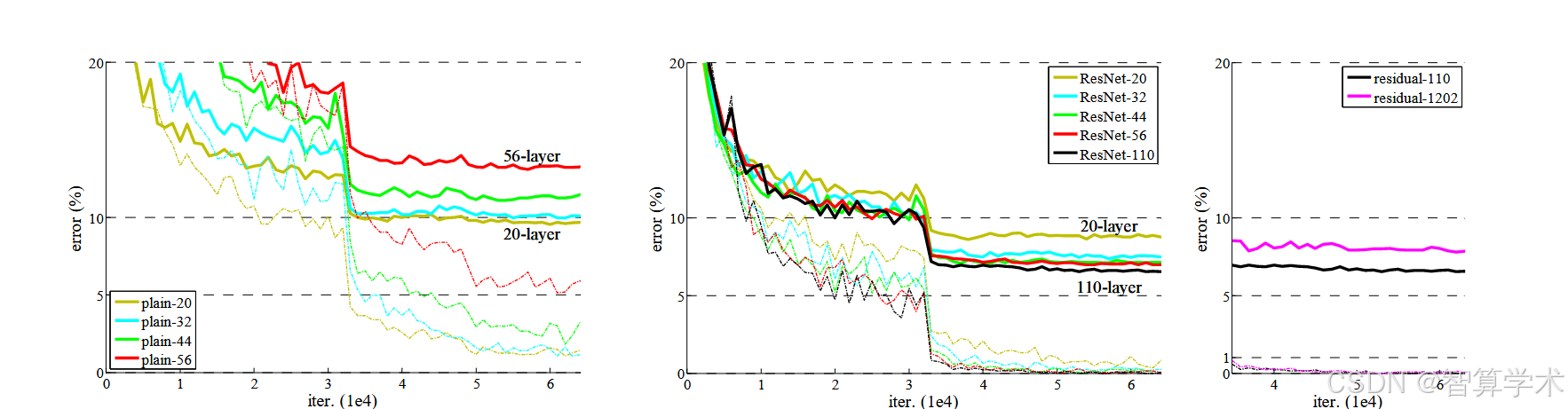
我们在 CIFAR-10 数据集上进行了更多的研究。CIFAR-10 数据集包含 50,000 张训练图像和 10,000 张测试图像,共有 10 个类别。我们展示了在训练集上训练并在测试集上评估的实验。我们关注的是极深网络的表现,而不是追求最先进的结果,因此我们故意使用简单的架构,具体如下:平凡/残差架构遵循图 3(中/右)的形式。网络输入是 32×32 的图像,且每个像素减去均值。第一层是 3×3 的卷积层。然后,我们使用一系列 6n 层的堆叠结构,分别在特征图大小为 {32, 16, 8} 上进行 3×3 卷积,每个特征图大小有 2n 层。滤波器的数量分别是 {16, 32, 64}。下采样通过步幅为 2 的卷积进行。网络以全局平均池化、一个 10 类的全连接层和 Softmax 层结束。总共有 6n+2 层加权层。下表总结了架构:当使用快捷连接时,它们连接到每对 3×3 层(总共 3n 个快捷连接)。在这个数据集上,我们在所有情况下使用身份快捷连接(即选项 A),因此我们的残差模型在深度、宽度和参数数量上与平凡网络完全相同。我们使用 0.0001 的权重衰减和 0.9 的动量,并采用 [13] 中的权重初始化和 BN [16],但不使用 dropout。我们在两块 GPU 上以小批量大小 128 进行训练。我们从 0.1 的学习率开始,在 32k 和 48k 次迭代时将其除以 10,并在 64k 次迭代时终止训练,训练是基于 45k/5k 的训练/验证划分进行的。我们遵循 [24] 中的简单数据增强方法进行训练:在每一边填充 4 个像素,并从填充后的图像中随机采样一个 32×32 的裁剪或其水平翻转。测试时,我们只评估原始 32×32 图像的单视角。我们比较了 n = {3, 5, 7, 9},得到 20、32、44 和 56 层的网络。图 6(左)展示了平凡网络的表现。深层平凡网络在深度增加时表现出更高的训练误差。这一现象与 ImageNet(图 4 左)和 MNIST(见 [42])上的表现相似,表明这种优化难题是一个基本问题。图 6(中)展示了 ResNets 的表现。与 ImageNet 的情况相似(图 4 右),我们的 ResNets 成功克服了优化难题,并且随着深度的增加,表现得到了提升。我们进一步探讨了 n = 18,得到了 110 层的 ResNet。在这种情况下,我们发现 0.1 的初始学习率稍大,不适合开始收敛,因此我们使用 0.01 进行训练热身,直到训练误差低于 80%(大约 400 次迭代),然后再恢复到 0.1 并继续训练。其余的学习调度与之前相同。这个 110 层的网络收敛得很好(图 6 中)。它的参数比其他深而薄的网络(如 FitNet [35] 和 Highway [42])少(见表 6),但仍处于最先进的结果(6.43%,表 6)。
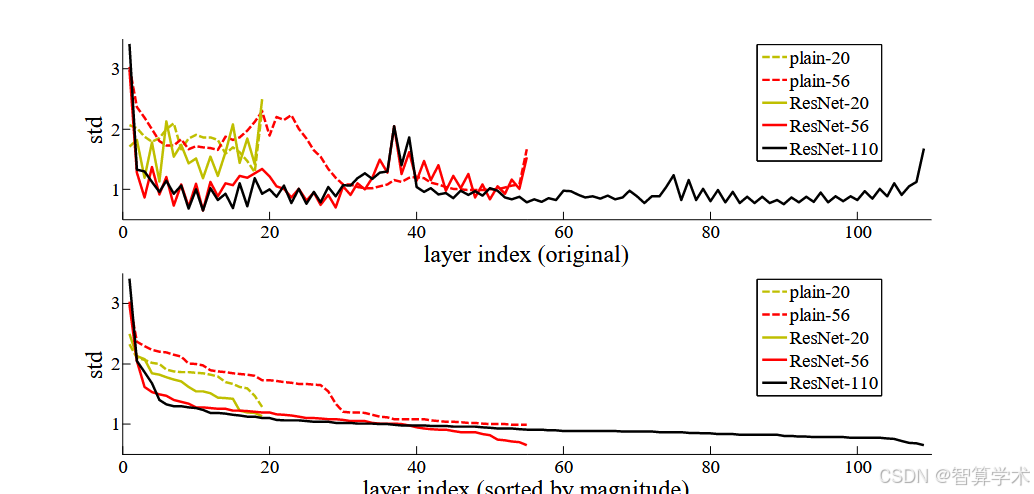
层响应分析:图 7 展示了各层响应的标准差(std)。这些响应是每个 3×3 层的输出,经过 BN 和其他非线性函数(ReLU/addition)之前的结果。对于 ResNets,这一分析揭示了残差函数的响应强度。图 7 显示,ResNets 的响应通常比其平凡网络的响应小。这些结果支持了我们基本动机(见第 3.1 节)的观点,即残差函数通常比非残差函数更接近零。我们还注意到,随着 ResNet 网络深度的增加,响应的幅度逐渐减小,从 ResNet-20、56 和 110 的比较中可以看出。层数越多,ResNet 中的每一层对信号的修改越小。
探索 1000 层以上的网络:我们探索了一个超过 1000 层的极深网络。我们设置 n = 200,得到一个 1202 层的网络,按照上述方式进行训练。我们的模型没有遇到优化困难,这个 1202 层的网络能够实现训练误差 <0.1%(图 6 右)。其测试误差仍然较好(7.93%,见表 6)。但是,这种极深模型仍然存在一些未解问题。这个 1202 层的网络的测试结果不如我们的 110 层网络,尽管它们的训练误差相似。我们认为这是因为过拟合。对于这个小数据集,1202 层的网络可能过于庞大(19.4M 参数)。强正则化(如 maxout [10] 或 dropout [14])可以用于获得该数据集上的最佳结果(见 [10, 25, 24, 35])。在本文中,我们没有使用 maxout/dropout,而是通过深而薄的架构设计对模型进行了正则化,以便不偏离优化难题的研究重点。但是,结合更强的正则化可能会改善结果,这一点我们将在未来的研究中进一步探讨。
精读
实验设置:
-
数据集:使用 CIFAR-10 数据集,包含 50,000 张训练图像和 10,000 张测试图像,分为 10 个类别。
-
网络架构:实验主要关注非常深的网络,但不追求最先进的结果。使用了简单的架构,其中包括平凡(plain)和残差(residual)架构,输入是 32×32 的图像,经过预处理(像素均值减去)。网络结构采用 3×3 的卷积层,并堆叠 6n 层卷积层,层数随 n 的不同而变化。
模型设计:
-
网络结构中每层卷积的滤波器数量为 {16, 32, 64},特征图尺寸分别为 {32, 16, 8}。
-
下采样通过步幅为 2 的卷积实现,网络最后使用全局平均池化,接一个 10 类的全连接层并通过 Softmax 进行分类。
-
在使用残差连接时,所有的快捷连接都是身份连接(即选项 A)。
训练设置:
-
使用权重衰减(0.0001)和动量(0.9),采用 BN(批归一化)进行训练,但不使用 dropout。
-
采用 mini-batch 训练,批量大小为 128,使用两块 GPU。
-
学习率初始值为 0.1,每训练 32k 和 48k 次迭代后学习率分别除以 10,训练在 64k 次迭代时结束。
-
数据增强方法:每边填充 4 像素,随机裁剪或水平翻转图像。
深度网络表现:
-
平凡网络:随着深度增加,训练误差升高,表现出优化难题。这个问题在 CIFAR-10、ImageNet 和 MNIST 数据集上都存在,表明这是一个基本的优化难题。
-
残差网络(ResNet):相比平凡网络,ResNet 成功克服了优化难题,并且随着网络深度的增加,准确率提高。
110 层网络实验:
-
在 n = 18 时,得到了一个 110 层的 ResNet。在初始学习率为 0.1 时,网络收敛较慢,因此使用了更小的学习率 0.01 来热身训练,直到训练误差低于 80%,然后恢复为 0.1 继续训练。这个 110 层网络收敛良好,且参数量比其他深而薄的网络(如 FitNet 和 Highway)少,但表现接近最先进的结果。
层响应分析:
-
通过分析每层的标准差(响应的幅度),发现 ResNet 网络的每一层响应普遍小于平凡网络。这表明,残差函数可能更接近零,且随着网络层数增加,单个层对信号的修改逐渐减小。
-
探索 1000 层以上的网络:
-
实验中还探索了一个超过 1000 层的网络。通过设置 n = 200,构建了一个 1202 层的网络,成功避免了优化困难,并且训练误差小于 0.1%。但是,这个网络的测试误差(7.93%)高于 110 层的网络,可能是因为过拟合问题。网络参数过多(19.4M)导致在小数据集上表现不如预期。
过拟合和正则化:
-
对于深度超过 1000 层的网络,可能会出现过拟合,因为网络参数过多,而 CIFAR-10 数据集比较小。为了避免过拟合,通常会使用更强的正则化方法,如 maxout 或 dropout,尽管本文没有使用这些方法,而是通过设计深而薄的架构进行正则化。未来研究可能会探索结合强正则化方法来进一步提高结果。
4.3. Object Detection on PASCAL and MS COCO—PASCAL和MS COCO上的对象检测
翻译
我们的方法在其他识别任务上也表现出良好的泛化性能。表7和表8展示了在PASCAL VOC 2007和2012 [5]以及COCO [26]数据集上的目标检测基准结果。我们采用Faster R-CNN [32]作为检测方法。在这里,我们关注的是将VGG-16 [41]替换为ResNet-101所带来的改进。检测实现(见附录)在两种模型下是相同的,因此这些提升只能归因于更好的网络。最显著的是,在具有挑战性的COCO数据集上,我们在COCO的标准指标(mAP@[.5, .95])上获得了6.0%的提升,相当于28%的相对改善。这一提升完全归因于学习到的表示。基于深度残差网络,我们在ILSVRC和COCO 2015比赛的多个赛道上获得了第一名:ImageNet检测、ImageNet定位、COCO检测和COCO分割。详细信息见附录。
精读
-
方法的泛化能力:我们的模型在不同的识别任务上都表现得很好,能够适应其他数据集的需求。
-
目标检测任务:我们在PASCAL VOC 2007和2012,以及COCO数据集上进行了目标检测的基准测试,采用了Faster R-CNN作为检测框架。
-
模型改进:我们将VGG-16网络替换成了ResNet-101网络,进行比较。在这两个网络的检测实现是相同的,因此提升的效果完全是因为网络结构本身的优势。
-
COCO数据集上的提升:在COCO数据集上,我们得到了6.0%的提升,这意味着相对提升了28%。这种提高主要得益于ResNet网络更好的特征表示能力。
-
比赛成绩:基于深度残差网络,我们在2015年的ILSVRC和COCO比赛中获得了多个赛道的第一名,包括ImageNet检测、ImageNet定位、COCO检测和COCO分割任务。
总结:通过使用ResNet-101网络,我们在多个任务和数据集上取得了显著的性能提升,尤其是在COCO数据集上。


















 6406
6406

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









