




Windows系统配置Carla
一、环境准备
- 安装anaconda
推荐清华镜像源下载需要的版本 - 在anaconda上创建python环境,并安装依赖包
$ conda create -n (name) python==3.7 $ conda activate (name) $ pip3 install --user pygame numpy networkx $ pip3 install --user pygame numpy networkx -i http://pypi.douban.com/simple --trusted-host pypi.douban.com
二、Carla安装
Windows下只支持手动安装,在Carla官网下载所需版本的两个压缩文件。
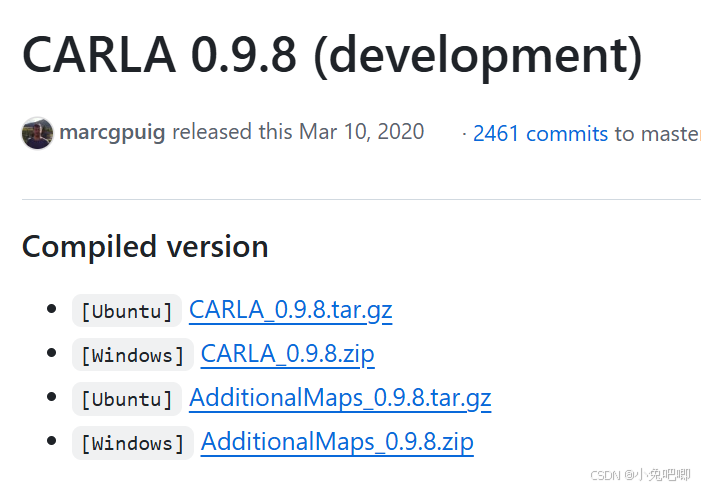
解压两个压缩包,并将AdditionalMaps解压至CARLA解压文件的根目录下。
三、检验成果
- 运行CarlaUE4.exe
在之后的实验中需要保证该端口一直运行 - 安装依赖库
$ cd ./PythonAPI/examples $ python -m pip install -r requirements.txt - 测试实例
手动控制:通过WASD控制汽车运动
自动控制$ python manual_control.py
出现以下画面证明安装成果。$ python automatic_control.py



















 3847
3847

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









