







全国职业院校技能大赛
竞赛任务书
样题四
赛项名称:生产单元数字化改造
英文名称:Digital transformation of production unit
赛项组别:高等职业教育(师生同赛)
赛项编号:GZ020
2023年全国职业院校技能大赛高职组
“生产单元数字化改造”赛项(样题四)
选手须知:
1.任务书共 11 页,如出现任务书缺页、字迹不清等问题,请及时向裁判示意,并进行任务书的更换。
2.参赛队应在6小时内完成任务书规定内容。
3.任务书中只能填写竞赛相关信息,不得出现学校、姓名等与身份有关的信息或与竞赛过程无关的内容,否则成绩无效。
4.在完成任务过程中,请及时保存程序及数据。
5.本赛程结束前,请选手自行备份项目程序及文件至“E:\赛位号”文件夹。
6.由于参赛选手人为原因导致竞赛设备损坏,以致无法正常继续比赛,将取消参赛队竞赛资格。
7.大赛提供的部分3D模型、器件手册及相关资料已存储到“E:\资料”文件夹下。
竞赛场次:第 场 赛位号:第 号
竞赛平台描述:
生产单元数字化改造竞赛平台是以数字化关键技术为核心,集成智能仓储、智能机器人、AMR自主移动机器人、智能视觉、SCADA系统监控、WMS系统、MES系统、数字孪生的综合应用单元。竞赛平台参考示意图如图1所示。
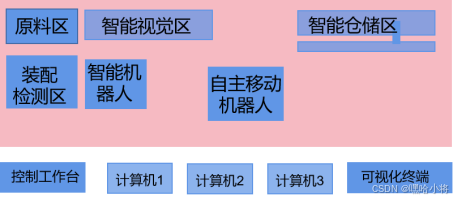
图1 竞赛平台布局参考示意图
其生产工艺参考流程为:根据客户联接器生产任务定制需求,在MES系统中下发任务订单,由机器人完成订单指定物料的取料,AMR自主移动机器人将物料运送至智能装配区,智能机器人与智能视觉配合完成物料的检测与抓取,按照任务订单要求,完成定制产品的组装与检测,根据检测结果,放置到指定仓位。生产任务执行过程中,实时采集仓位、智能机器人、AMR自主移动机器人、智能视觉、RFID等相关数据,通过数字孪生实现虚实结合,完成联接器装配。联接器装配示意图如图2所示。
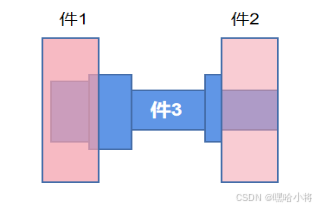
图2 联接器装配示意图
任务一:生产单元数字化改造方案设计(15%)
任务1.1 生产单元功能规划及仿真验证
1.1.1 根据生产工艺流程,绘制生产单元的工艺流程图,并生成PDF版本,以“赛位号+生产单元工艺流程图”为文件名,保存在“E:\赛位号”文件夹下。
1.1.2 智能仓储仿真设计
(1)在已构建的数字孪生模型基础上标定模型位置,实现实物与数字孪生模型位置的1:1布局,同时生成平面布局图,以“赛位号+智能仓储布局图”为文件名,并以PDF版本保存在“E:\赛位号”文件夹下。
(2)根据竞赛平台中提供的模型设置物理属性,创建运动属性,添加信号表。
(3)在仿真系统中控制智能仓储机器人的X轴、Y轴、Z轴位置运动。
1.1.3 生产单元系统仿真测试
在数字孪生软件中配置通信和信号,将配置的通信信号与模型驱动接口建立映射。编写PLC和触摸屏程序,通过PLC控制生产单元数字孪生模型,实现生产单元模型在软件中仿真测试。
(1)生产单元数字孪生模型的驱动接口与外部通信信号建立映射,实现数字孪生系统和PLC的数据交换。
(2)自行设计智能仓储虚拟仿真方案并实施测试,测试内容包括但不限于,通过触摸屏控制智能仓储机器人的X\Y\Z轴的移动,实现指定仓位取放料操作。
任务1.2 生产数据采集方案规划设计
1.2.1 根据生产工艺流程中对数据采集的要求,编制数据采集方案,需明确采集数据内容、智能硬件、通信协议、数据格式和通信链路,以“赛位号+数据采集方案”为文件名,并生成PDF版本保存在“E:\赛位号”文件夹下。
1.2.2 根据采集方案,绘制生产单元网络拓扑图,并规划各硬件网络地址,以“赛位号+网络拓扑图(采集)”为文件名,并生成PDF版本保存在“E:\赛位号”文件夹下。
1.2.3 数据库环境搭建及测试
(1)自行设计数据表格式。
(2)建立仓位、智能视觉、各机器人状态、RFID以及能耗数据变量,通过调试助手工具完成数据库的通信测试。
任务1.3 网络部署方案设计
1.3.1 基于网络安全和工业云平台数据应用,绘制基于防火墙和工业网关的网络拓扑图,以“赛位号+网络拓扑图(安全)”为文件名,并生成PDF版本保存在“E:\赛位号”文件夹下。
1.3.2 能够对赛项设置的网络“攻击”行为实施数据分析、防护处置和网络管控,并填写《网络信息安全分析报告》,以“赛位号+网络信息安全分析报告”为文件名,并生成PDF版本保存在“E:\赛位号”文件夹下。
(1)编制、使用网络安全工具软件检查并分析工业网络,找到可能的危险数据。
使用两台计算机,计算机1向计算机2发送三次数据,获取对应数据,以.pcapng格式进行保存,查看获取的数据信息,分析发送信息的时间和数据长度。
(2)基于网络监控与分析,追溯危险数据来源。
使用两台计算机,使用telnet明文传送方式,计算机1通过TCP协议向计算机2发送三条信息(信息内容裁判指定),计算机2获取对应数据,以.pcapng格式进行保存,查看获取的数据信息,分析计算机1的IP地址及计算机1发送的数据内容。
任务二:生产单元智能化集成(10%)
任务2.1 生产单元网络搭建
根据生产单元数字化改造方案设计的网络拓扑图,完成交换机、数据采集设备、生产单元设备软、硬件的网络连接及IP地址配置。
任务2.2 生产单元网络通讯测试
根据生产单元设备软、硬件的网络连接及IP地址配置,测试网络通讯状态,显示同一局域网下所有网络设备IP地址。
任务2.3 智能网关参数配置与数据采集
2.3.1 根据系统网络结构的规划,完成智能网关的参数配置,使其与SCADA系统建立数据连接。
2.3.2 通过智能网关能够采集生产单元电能的实时数据,并在智能网关的组态界面中能实时显示。
任务2.4 构建AMR自主移动机器人环境地图
2.4.1 在AMR自主移动机器人建图工具中,根据参考工艺流程控制其在竞赛单元场地运动,构建环境地图。
2.4.2 在AMR自主移动机器人建图工具中,控制AMR自主移动机器人移动到相应工位,建立工位点并保存坐标数据。设充电位为工位点1,智能装配出入库位为工位点2,智能仓储出库位(第2列)为工位点3,智能仓储入库位(第4列)为工位点4。
2.4.3 测试AMR自主移动机器人的自主导航功能,在建图工具操作界面中,利用“移动任务”功能,控制移动机器人自主地从工位点4移动至工位点2。
任务2.5 智能视觉信息采集
2.5.1 智能视觉安装及网络系统的连接
(1)安装智能视觉支架及智能视觉。
(2)连接相机的电源线、通信线。
测试要求如下:
启动智能视觉编程软件,实时显示智能视觉图像,调整智能视觉焦距和曝光支架至合适位置。
2.5.2 光源控制设定
编写PLC和触摸屏程序,控制光源关闭与打开,确保在光源打开的状态下,智能视觉均能够稳定、清晰地摄取图像信号。
测试要求如下:
(1)在触摸屏上设计“光源控制”按钮,点击“光源控制”按钮控制光源的打开与关闭。
(2)在智能视觉软件中能够实时查看智能视觉下方托盘中工件的图像,要求工件图像清晰。
任务2.6 防火墙配置与安全策略设置
2.6.1 通过防火墙管理界面,将其GE1端口配置为MES系统端口、GE2端口配置为内网接口、GE3端口配置为外网接口。
2.6.2 配置防火墙安全策略,实现外网设备通过外网接口不能访问MES系统,MES系统通过内网接口能够访问外网设备。
任务三:生产单元功能开发与测试(30%)
任务3.1 生产单元总控功能开发
3.1.1 编写PLC和触摸屏程序,在触摸屏上选取装配工件所对应的3个仓位号,依次进行智能仓储出库。
3.1.2 编写PLC和触摸屏程序,将智能仓储出库工件通过AMR自主移动机器人依次转运至智能视觉区。
3.1.3 编写PLC、触摸屏和智能视觉程序,智能视觉对工件进行颜色、尺寸、位置、形状的检测识别,PLC经过处理,传输智能视觉识别的数据给智能机器人。
3.1.4 编写智能机器人和PLC程序,智能机器人抓取工件物料放至暂存区,3种零件齐套后,工业机器人完成联接器装配。
3.1.5 编写PLC和智能机器人程序,对装配完成的成品进行测量,测量完成后将联接器放回托盘,通过RFID进行工件信息的更新写入。
3.1.6 通过AMR自主移动机器人转运至智能仓储区,完成联接器的入库。
任务四: 生产单元信息化技术集成(10%)
任务4.1 WMS系统的信息化集成
4.1.1 完成WMS系统的部署和配置,使其与智能仓储的PLC进行通讯,并实时显示通讯状态(在线或离线)。
4.1.2 编写PLC和触摸屏等程序,通过WMS系统的库存报警界面,自动生成每类产品的库存数量,当库存数量到达库存上限的阈值进行库存上限报警。
4.1.3 编写PLC和触摸屏等程序,通过WMS系统的库存报警界面,自动生成每类产品的库存数量,当库存数量到达库存下限的阈值进行库存上限报警。
任务4.2 SCADA系统信息化集成
4.2.1 SCADA系统配置和界面制作,使其与智能装配的PLC进行通讯,并实时显示通讯状态(在线或离线)。
4.2.2 完成SCADA系统智能装配的智能机器人数据监控界面制作,手动操作智能机器人,SCADA系统工业机器人信息界面实时更新智能机器人6个轴的关节数据(J1、J2、J3、J4、J5、J6)。
4.2.3 完成SCADA系统智能装配工作站的装配流程监控界面制作,并实时显示智能装配工作站的装配步骤、装配合格数量和装配不合格数量。
任务4.3 MES系统的信息化集成
4.3.1 完成MES系统配置和变量解析,使其与智能装配的PLC进行通讯,并实时显示通讯状态(在线或离线)。
4.3.2 完成MES系统的智能机器人信息界面数据的变量解析,手动操作智能机器人,MES系统的智能机器人信息界面实时更新智能机器人6个轴的关节数据(J1、J2、J3、J4、J5、J6)。
4.3.3 完成MES系统中盘点管理界面数据的变量解析,通过MES系统的盘点管理界面下发仓位排序盘点指令,机器人依次对各仓位进行盘点,根据仓位号由低到高排序,托盘优先存放仓位号小的仓位,并将仓位信息实时同步到MES系统的盘点管理界面。
任务五:生产单元运行生产(15%)
任务5.1 基于MES系统的生产与管控
根据客户联接器生产任务定制需求,在MES系统中下发任务订单,由机器人完成订单指定物料的取料,AMR自主移动机器人将物料运送至智能装配区,智能机器人与智能视觉配合完成任意位置物料的检测与抓取,按照任务订单要求,完成定制产品的组装与检测,根据检测结果,放置到指定仓位。
任务5.2 基于MES系统的设备管理
生产任务执行过程中,实时采集仓位、智能机器人、AMR自主移动机器人、RFID等相关数据,并在MES看板中显示。
5.2.1 看板显示设备状态
(1)实时显示智能仓储状态。
(2)实时显示智能机器人设备状态。
5.2.2 看板显示仓位管理状态
(1)实时显示看板显示仓位信息。
(2)看板显示工件信息跟踪,实时跟踪工件状态信息。
任务5.3 数字孪生系统虚实联动
在已构建的数字孪生模型基础上标定模型位置,实现实物与数字孪生模型位置的1:1布局。在提供的虚拟仿真软件中,完善智能机器人、智能仓储、AMR自主移动机器人、智能装配和智能视觉区动作属性。
虚拟工作站系统各部分位置应与实物布局有一定对应关系。
测试要求如下:
(1)基于生产单元数字孪生系统开放的通信协议,在数字孪生软件中配置通信和信号,将配置的通信信号与模型驱动接口建立映射。
(2)基于MES系统的生产与管控,生产任务执行过程中,通过实时数据采集和数字孪生软件,实现虚实联动。
任务六:生产单元数据应用(10%)
任务6.1 根据4个以上生产订单的生产结果,完成智能网关配置并制作产品检验统计界面,实时统计和计算本次生产订单的订单号、各物料所用数量和装配质量结果(合格/不合格)。
| 订单号 | 件1数量 | 件2数量 | 件3数量 | 装配质量结果 |
| 1 |
任务6.2 完成智能网关配置并设计自主移动机器人电量管理界面,根据生产订单的自主移动机器人用电量,生成曲线图,根据订单运行时间计算下次自主移动机器人充电时间。
任务6.3 完成智能网关配置并设计智能仓储统计界面,根据生产订单的出入库时间,生产柱状图,根据订单运行时间计算下一次智能仓储的出入库速度,并进行优化,提升工作效率。
任务七:生产单元改造方案自评估(5%)
根据生产单元的数字化改造过程,完成生产单元数字化改造评估总结(含:1.数字化单元改造设计的思路和特点;2.设计方案解决的关键技术问题;3.本单元数字化改造后的性能提升等内容),以PDF版本保存《生产单元数字化改造评估总结报告》在“E:\赛位号”文件夹下。
任务八:职业素养(5%)
考查选手操作过程中的安全规范;设备、工具仪器使用情况;卫生清洁情况;穿戴规范;工作纪律,文明礼貌等。由现场裁判进行过程记录、现场评分、选手确认。
在任务施工过程中正确选择工具,安全可靠的使用工具,设备安装稳固、部件均匀排布、行列对齐、间距相等、整齐美观;布线合理、所有线都装入线槽。施工完成后需对地板卫生进行打扫、对桌面进行整理、对工具设备进行还原。
任务要求如下:
1.赛位区域地板、桌面等处卫生打扫。
2.使用的工具还原规整、设备摆放工整规整等。
3.工位设备安装整齐、设备部件均匀排布、布线合理美观等。
4.操作的安全规范。
5.着装规范。
6.资料归档完整。
7.现场工作纪律。
8.完成任务的计划性、条理性,以及遇到问题时的应对状况等。



















 764
764

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











