







GRASS GIS 是一个强大的开源地理信息系统软件,专注于地理空间数据管理和分析;SAGA GIS 是一个开源的地理信息系统软件,专注于栅格数据处理和空间分析。这两款软件我仅仅使用过SAGA,这款软件对于水文学的一些分析比较支持,计算水文学相关的一些地形指数非常方便。目前,GRASS GIS 和 SAGA GIS 都已经集成到 QGIS 中,用户可以通过 QGIS 的“处理工具箱”直接访问并使用这两个工具。
下面,我们将从软件的主要功能、支持的系统、软件官网等方面对其进行简单的介绍。
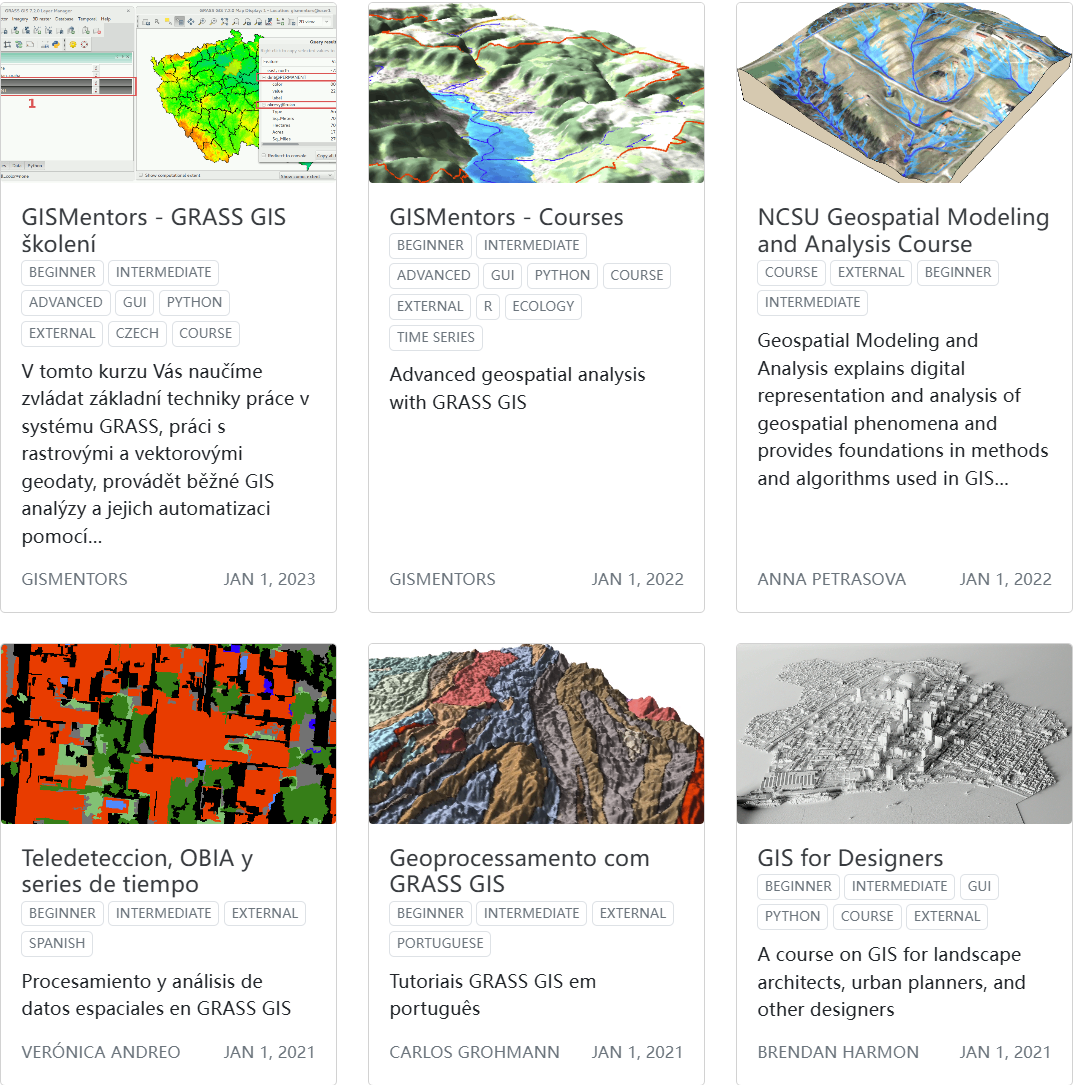
GRASS GIS的官网网址为https://grass.osgeo.org/,该软件支持的操作系统包括Windows、macOS和Linux。GRASS GIS是一款开源软件,用户可以从其官网下载最新版本的软件。GRASS GIS提供了丰富的官方教程,涵盖了从基础操作到高级功能应用的多个方面,帮助用户更好地掌握软件的使用。主要功能包括数据管理、地图制图、简单的三维建模等,支持R语言与Python。


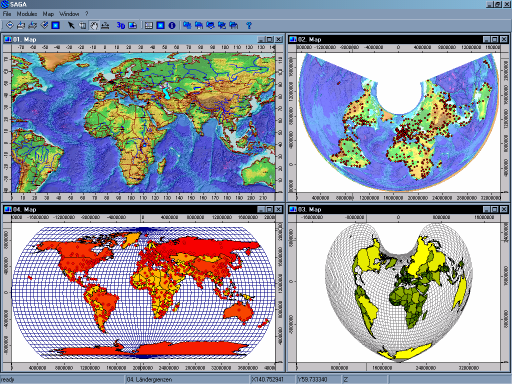
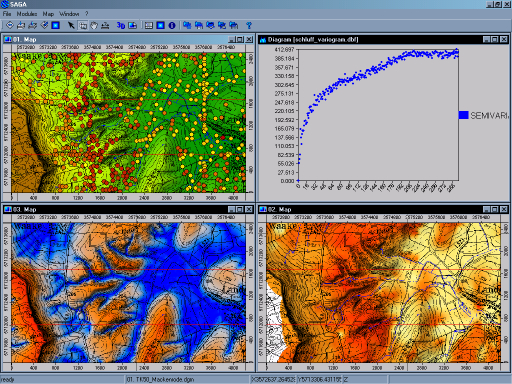
SAGA GIS的官网网址为http://www.saga-gis.org/en/index.html,该软件支持的操作系统包括Windows、Linux。SAGA GIS是一款开源软件,用户可以从其官网下载最新版本的软件。SAGA GIS提供了丰富的官方教程,例如以地形湿度指数(TWI)和水流功率指数(SPI)为例的使用教程。此外,其快速入门文档还介绍了如何运行软件、导入数据、进行地形分析以及保存数据等。这款软件主要用于地形分析、水文分析、地理数据处理与分析,支持C++和Python脚本编程。


















 343
343

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









