







一维码识别
参考资料:(侵权删)
1、https://blog.youkuaiyun.com/qq_40908493/article/details/79829226?ops_request_misc=%25257B%252522request%25255Fid%252522%25253A%252522161188879716780274186320%252522%25252C%252522scm%252522%25253A%25252220140713.130102334.pc%25255Fall.%252522%25257D&request_id=161188879716780274186320&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allfirst_rank_v2~rank_v29-1-79829226.pc_search_result_cache&utm_term=vs2013+opencv+2.4.9%25E5%25AE%2589%25E8%25A3%2585zbar
2、https://blog.youkuaiyun.com/dcrmg/article/details/52194896?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522161190784316780255272641%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=161190784316780255272641&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allfirst_rank_v2~rank_v29-2-52194896.pc_search_result_cache&utm_term=opencv%2Bzbar二维码识别(一维码校正)&spm=1018.2226.3001.4449
zbar.h可以自动扫描识别一维码二维码,不需要校正也可识别。在参考资料的基础上修改了一些代码段及添加了注释,基本原理相同。
1、安装zbar.h后简单测试(如何安装配置参考资料1)
#include"opencv2/highgui/highgui.hpp"
#include "zbar.h"
#include <iostream>
using namespace std;
using namespace zbar; //添加zbar名称空间
using namespace cv;
double Point2PointDist(Point2f& a, Point2f& b);
double Line_Angle(Point2f& a, Point2f& b);
int main(int argc, char*argv[])
{
ImageScanner scanner; //构造扫描器ImageScanner对象,并使用set_config进行初始化
scanner.set_config(ZBAR_NONE, ZBAR_CFG_ENABLE, 1);
//加载灰度图并显示
Mat imageGray = imread("6.png",0); //小于0或不写则加载原图,等于0则加载灰度图,大于0则加载RGB图像
if (!imageGray.data)
{
cout << "请确认图片是否存在" << endl;
system("pause");
return 0;
}
//imshow("原图", image);
//Mat imageGray;
//cvtColor(image, imageGray, CV_RGB2GRAY); //转换为灰度图
imshow("灰度图", imageGray);
//扫描并显示信息
int width = imageGray.cols;
int height = imageGray.rows;
uchar *raw = (uchar *)imageGray.data;
Image imageZbar(width, height, "Y800", raw, width * height);//y800实际为灰度图代号
scanner.scan(imageZbar); //扫描条码
Image::SymbolIterator symbol = imageZbar.symbol_begin();
if (imageZbar.symbol_begin() == imageZbar.symbol_end())
{
cout << "查询条码失败,请检查图片!" << endl;
}
for (; symbol != imageZbar.symbol_end(); ++symbol)
{
cout << "类型:" << endl << symbol->get_type_name() << endl << endl;
cout << "条码:" << endl << symbol->get_data() << endl << endl;
}
waitKey();
imageZbar.set_data(NULL, 0);
return 0;
}
结果图示:

2、(实际上条码有一定角度也能扫描出来)将一维码校正后再次扫描显示信息
#include "opencv2/core/core.hpp"
#include"opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "zbar.h"
#include <iostream>
using namespace std;
using namespace zbar; //添加zbar名称空间
using namespace cv;
double Point2PointDist(Point2f& a, Point2f& b); //用于计算频谱图直线距离
double Line_Angle(Point2f& a, Point2f& b);//计算直线角度
int main(int argc, char*argv[])
{
ImageScanner scanner; //构造扫描器ImageScanner对象,并使用set_config进行初始化
scanner.set_config(ZBAR_NONE, ZBAR_CFG_ENABLE, 1);
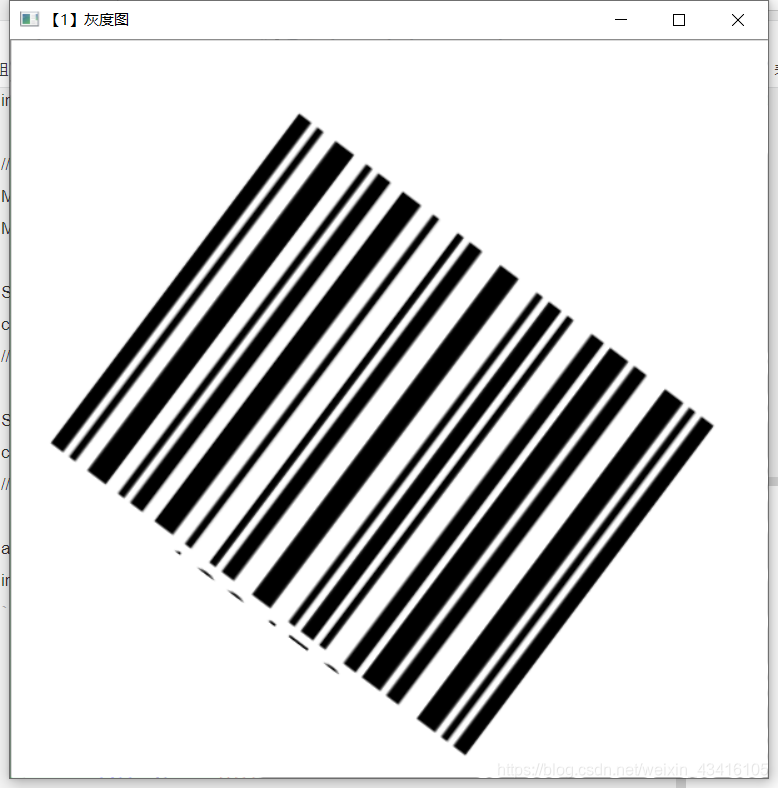
//1、加载灰度图并显示
Mat imageGray = imread("3.png", 0); //小于0或不写则加载原图,等于0则加载灰度图,大于0则加载RGB图像
if (!imageGray.data)
{
cout << "请确认图片是否存在" << endl;
system("pause");
return 0;
}
imshow("【1】灰度图", imageGray);
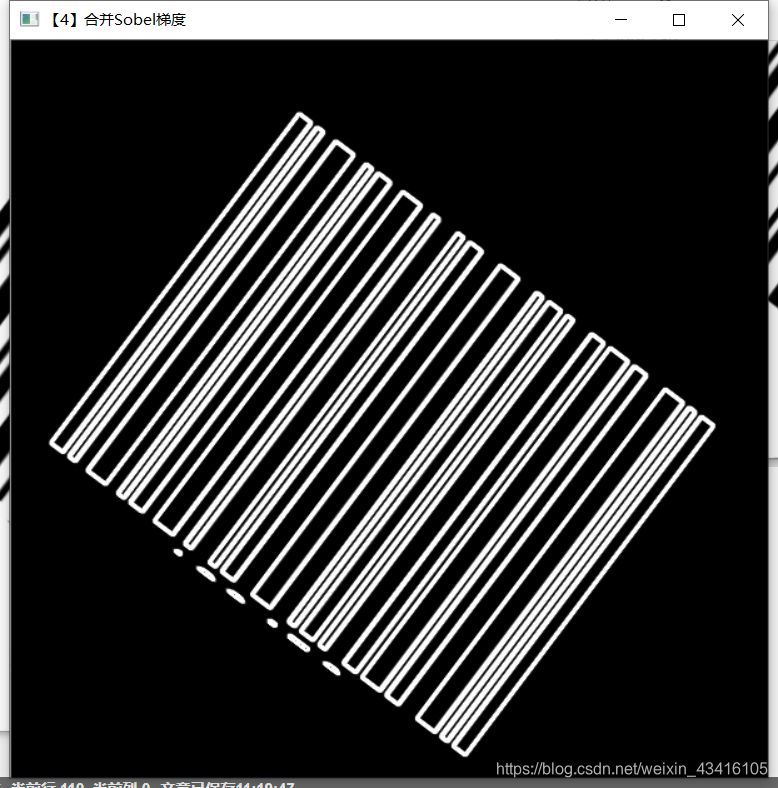
//2、计算图像x、y方向的梯度,并求和,突出边缘信息
Mat grad_x, grad_y,dst;
Mat abs_grad_x, abs_grad_y;
Sobel(imageGray, grad_x, CV_16S, 1, 0, 3, 1);
convertScaleAbs(grad_x, abs_grad_x);
//imshow("【2】x方向Sobel", abs_grad_x);
Sobel(imageGray, grad_y, CV_16S, 0, 1, 3, 1);
convertScaleAbs(grad_y, abs_grad_y);
//imshow("【3】y方向Sobel", abs_grad_y);
addWeighted(abs_grad_x, 1, abs_grad_y, 1, 0, dst);
imshow("【4】合并Sobel梯度", dst);
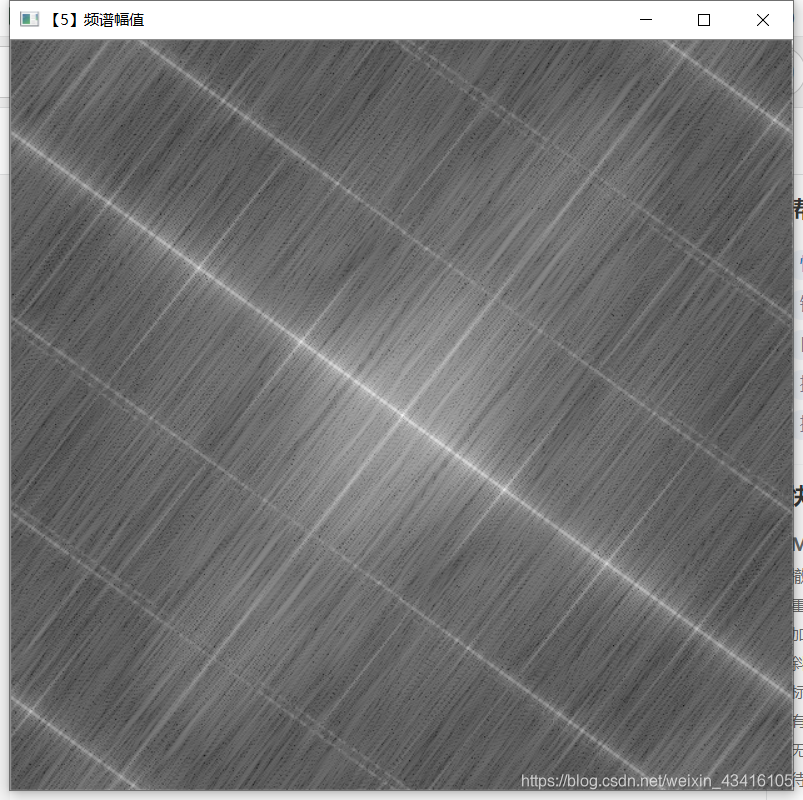
//3、离散傅里叶变换,画出频谱信息
//扩充边界
int m = getOptimalDFTSize(dst.rows);
int n = getOptimalDFTSize(dst.cols);
Mat padded; //填充边界,当图片尺寸为2,3,5的整数倍时,离散傅里叶变换速度最快
copyMakeBorder(dst, padded, 0,m - dst.rows, 0, n - dst.cols,BORDER_CONSTANT,Scalar::all(0));
//为傅里叶变化的结果(实部和虚部)分配存储空间
Mat planes[] = { Mat_<float>(padded), Mat::zeros(padded.size(), CV_32F) };
Mat complexI;
merge(planes, 2, complexI);
dft(complexI,complexI);//进行就地离散傅里叶变换
//将复数转换为幅值
split(complexI, planes);
magnitude(planes[0], planes[1], planes[0]);
Mat magnitudeImage = planes[0];
//进行对数尺度缩放
magnitudeImage += Scalar::all(1);
log(magnitudeImage, magnitudeImage);
//剪切和重分布幅度图像限
int cx = magnitudeImage.cols / 2;
int cy = magnitudeImage.rows / 2;
Mat q0(magnitudeImage, Rect(0, 0, cx, cy)); // ROI区域的左上
Mat q1(magnitudeImage, Rect(cx, 0, cx, cy)); // ROI区域的右上
Mat q2(magnitudeImage, Rect(0, cy, cx, cy)); // ROI区域的左下
Mat q3(magnitudeImage, Rect(cx, cy, cx, cy)); // ROI区域的右下
//交换象限(左上与右下进行交换)
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
//交换象限(右上与左下进行交换)
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
normalize(magnitudeImage, magnitudeImage, 0, 1, CV_MINMAX);
imshow("【5】频谱幅值", magnitudeImage);
//4、二值化后找出频率变化最大的直线角度
//二值化并画出频谱图
Mat thresholdImg(magnitudeImage.size(), CV_8UC1);
magnitudeImage.convertTo(thresholdImg, CV_8UC1, 255, 0);//因归一化后数值均小于1,故应扩大回原有数值方便阈值化及后续操作
threshold(thresholdImg, thresholdImg,160,255,CV_THRESH_BINARY);
imshow("【6】频谱二值化图",thresholdImg);
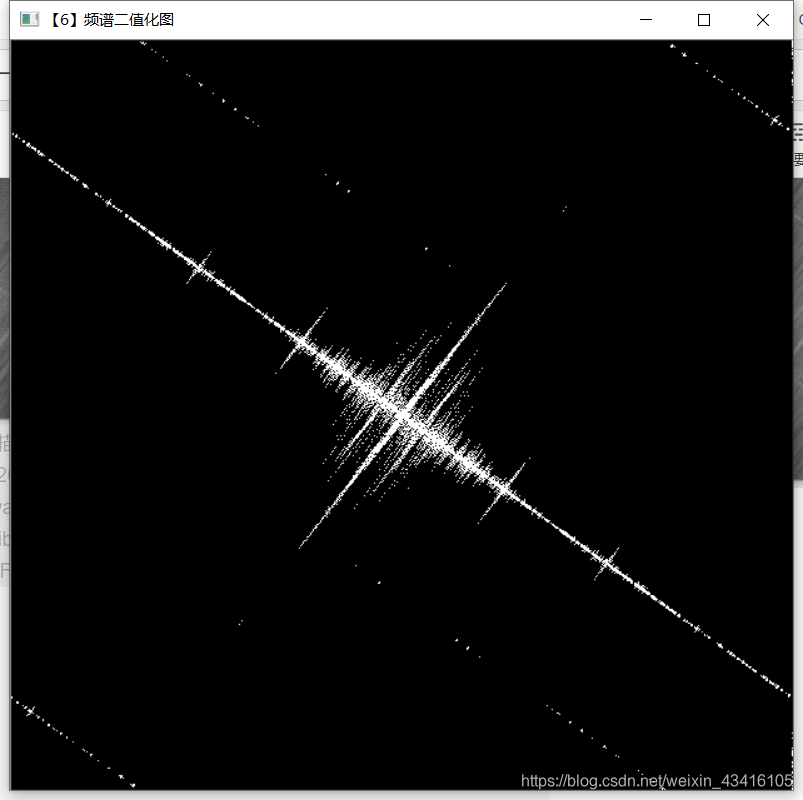
在此与参考资料2代码做了找出倾斜直线角度的修改,考虑到频谱二值化图中仍存在干扰,提高霍夫转换阈值可提取出最长线段,但阈值如果取得较低可能会出现多条线段,资料2中没有考虑到此种情况,将所有线段都画了出来(虽然只有一条),我则采用累计概率霍夫变换(好像更复杂了。。。)求出最长线段
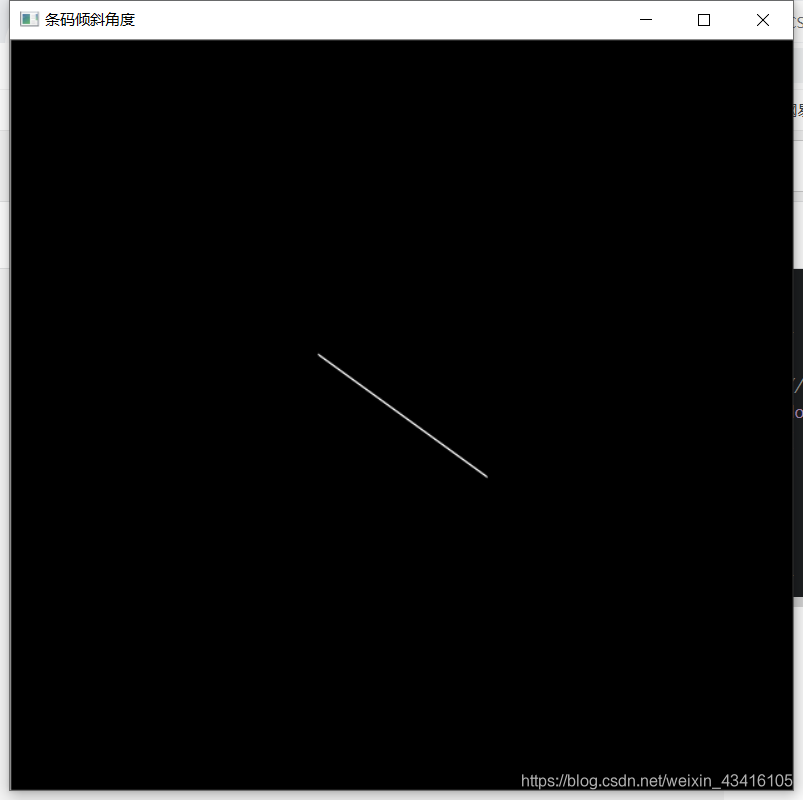
//找出最长直线及其角度
Mat angleImg(thresholdImg.size(),thresholdImg.type(),Scalar::all(0));
vector<Vec4i> lines;
HoughLinesP(thresholdImg, lines, 1, CV_PI / 180, 150, 0, 0);
int maxNum = 0;
double len = 0;
for (int i = 0; i < lines.size(); i++)
{
Vec4f j = lines[i];
Point2f point1 = Point2f(j[0], j[1]);
Point2f point2 = Point2f(j[2], j[3]);
if (len <=(Point2PointDist(point1, point2)))
{
len = Point2PointDist(point1, point2);
maxNum = i;
}
}
Point2f a = Point(lines[maxNum][0], lines[maxNum][1]);
Point2f b = Point(lines[maxNum][2], lines[maxNum][3]);
line(angleImg, a,b, Scalar::all(255),1,CV_AA);
imshow("条码倾斜角度", angleImg);
double angle=Line_Angle(a, b);
Point center = Point(imageGray.cols/2,imageGray.rows/2);
Mat rotMat = getRotationMatrix2D(center,angle,1);
Mat rotImg(imageGray.size(), imageGray.type());
warpAffine(imageGray,rotImg,rotMat,rotImg.size());
imshow("校正图像", rotImg);
//扫描并显示信息
int width = rotImg.cols;
int height = rotImg.rows;
uchar *raw = (uchar *)rotImg.data;
Image imageZbar(width, height, "Y800", raw, width * height);//y800实际为灰度图代号
scanner.scan(imageZbar); //扫描条码
Image::SymbolIterator symbol = imageZbar.symbol_begin();
if (imageZbar.symbol_begin() == imageZbar.symbol_end())
{
cout << "查询条码失败,请检查图片!" << endl;
}
for (; symbol != imageZbar.symbol_end(); ++symbol)
{
cout << "类型:" << endl << symbol->get_type_name() << endl << endl;
cout << "条码:" << endl << symbol->get_data() << endl << endl;
}
waitKey();
imageZbar.set_data(NULL, 0);
return 0;
}
//计算两点之间距离
double Point2PointDist(Point2f& a,Point2f& b)
{
double res = sqrt(pow(a.x - b.x, 2) + pow(a.y - b.y, 2));
return res;
}
//计算一条直线与水平线角度
double Line_Angle(Point2f& a,Point2f& b)
{
float k = 0;
k= (b.y -a.y) / (b.x-a.x);
double angle = atan(k) / CV_PI * 180; //图片x轴在正上方
return angle;
}



















 9749
9749

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









