







多传感器系统分析:800万像素前视摄像头、周视摄像头、环视摄像头与雷达的接入设计
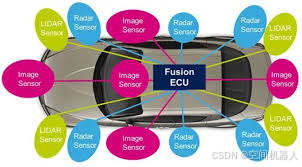
在高级驾驶辅助系统(ADAS)或自动驾驶系统中,摄像头和雷达的多传感器融合非常关键。本文分析了如何接入1个800万像素120°前视摄像头、5个200万像素100°周视摄像头、4个360°环视摄像头、3个毫米波雷达和12个超声波雷达,并对系统的带宽需求、处理能力及架构进行了详细讨论。
1. 摄像头系统分析
1.1 前视摄像头
- 像素:800万像素
- 视角:120°
- 用途:前视摄像头主要用于检测前方道路、行人、车辆以及交通标志,提供前向视觉数据。
- 带宽需求:
假设前视摄像头输出30帧/秒(FPS),24位颜色深度,数据带宽可以估算为:
对于如此高分辨率的摄像头,通常使用MIPI CSI-2接口,支持高带宽数据传输。带宽 = 800万像素 × 30 FPS × 24位 = 5.76 Gbps

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1185
1185

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











