







STM32 HAL库高级定时器输入捕获脉宽测量
- ✨相比于上面所使用的高级定时器输入捕获从模式来测量PWM信号,实现方法更为复杂一下,但是还是将实现的方法记录下来。
- 📌本篇实现方法内容参考《定时器TIM的输入捕获——正交编码器模式与PWM输入》
- 🔖想了解详细的有关实现方法可以前往相关篇内容了解。
- 🌿本篇基于STM32f030R8单片机。
📓本工程主要改善了,减少测量误差,将测量换算内容,换到了中断函数中执行,用时间换精度。并且采用多次读取测量结果,取多次连续测量值中,出现频率最高的数值作为输出值,有效减少单次数据异常情况。
- 📑测量原理介绍
通过定时器输入捕获功能,当一个外部信号输入,上升沿输入捕获,定时器产生中断,让定时器计数复位清零,并设置下一次输入捕获方式,改为下降沿输入捕获。在下一次输入捕获得到的计数值就是脉宽值。
- 这种方法和采用定时器双通道输入捕获不同,只利用了定时器的一个输入捕获通道。
- 🌿双通道输入捕获功能图:
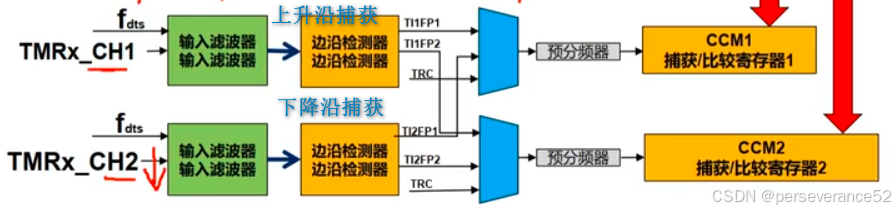
- 双通道输入捕获测量原理:一个通道配置上升沿输入捕获中断,一个通道配置下降沿输入捕获通道。当有一个完整的PWM周期信号输入时,上升沿信号输入时,定时器配置的上升沿捕获模式CCR1通道产生中断,复位计数器,开始记录CCR1的值,当下升沿信号输入时,定时器配置的下降沿输入捕获通道CCR2产生中断,记录CCR2的值,此时CCR2的值就是脉宽值,再下一个上升沿信号过来,则是一个完整的信号周期捕获。
🛠STM32CubeMX配置
- 🔧高级定时器1配置:(👉🏻在参数配置上,尽可能的将捕获定时器的自动载计数值设置大一点,减少定时器溢出更新事件)
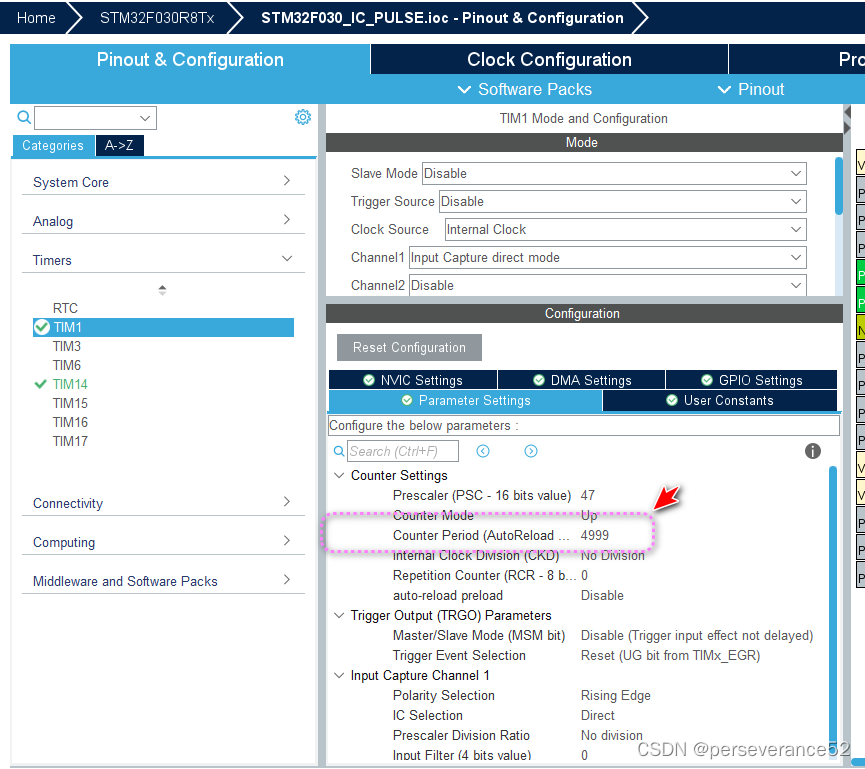
- 🌿时钟源:外部时钟
- 🌿定时器1分频系数,更具个人使用的芯片型号而定。
- 🌿向上计数方式。
- 🌿不开启自动重装载(auto-reload preload),相对于不使能影子寄存器。
- 其他都是默认选项配置。
-
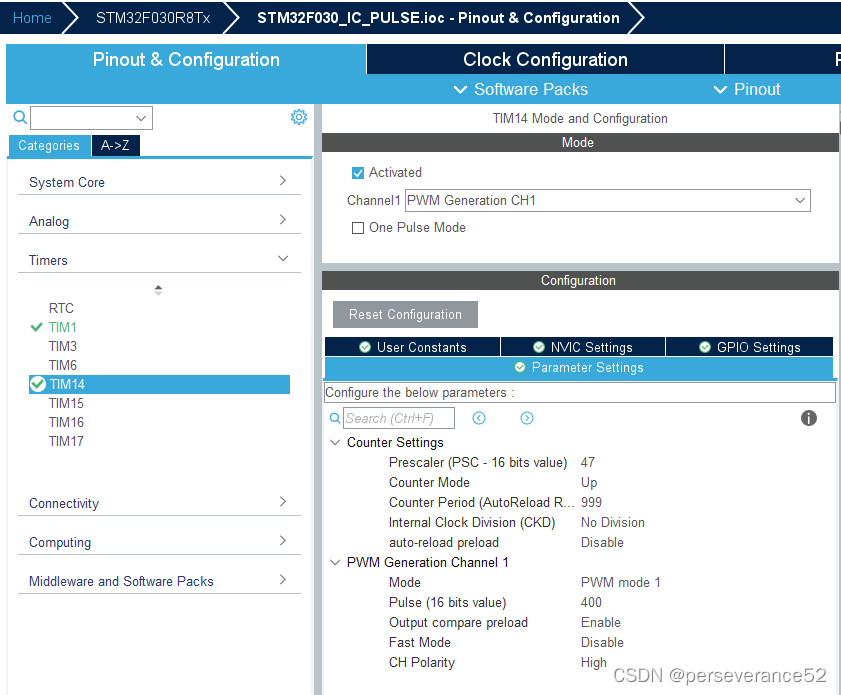
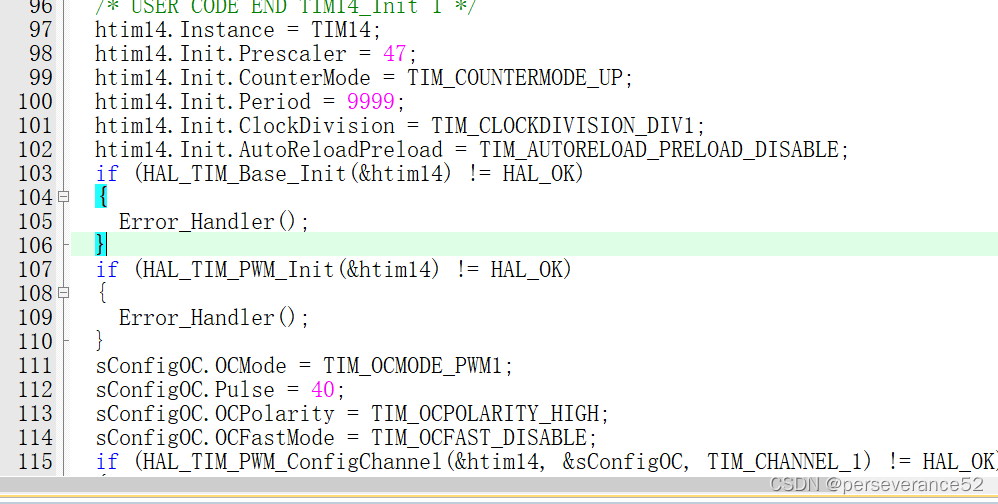
🔨 配置定时器14作为一个PWM信号输出源:
-
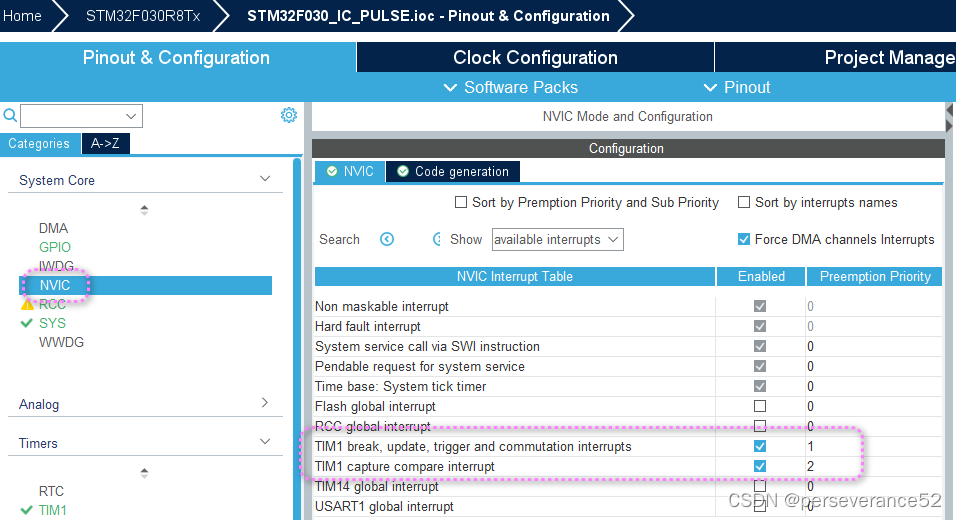
🔰使能定时器捕获、更新中断,以及中断优先级配置:(TIM1更新中断 > TIM1捕获中断)
📑功能代码实现部分
- 📝中断回调函数:
/**
* @brief 输入捕获回调函数
* @retval None
*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef* htim)
{
static uint8_t RisingEdge_count = 0;
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
if(capture_flag & 0x40) //0X40是0100 0000,高电平期间捕获到下降沿
{
capture_flag &= 0x3F; //0X3F是0011 1111,清除捕获到上升沿的标记位和捕获完成的标记位
value2 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); //获取当前的捕获值
__HAL_TIM_DISABLE(htim); //关闭定时器
__HAL_TIM_SET_COUNTER(htim, value2); //以value2为基准重新计数
TIM_RESET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1); //复位极性选择才能进行下行配置
/*输入捕获功能的重配与开启,硬件启动会产生几个时钟的延迟*/
TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_ICPOLARITY_RISING); //下次上升沿捕获
__HAL_TIM_ENABLE(htim); //重开定时器
}
else //捕获到上升沿
{
capture_flag |= 0x40; //0X40是0100 0000,标记捕捉到了一次上升沿
RisingEdge_count++;
if((RisingEdge_count % 2 == 0)) //每捕获两次相同跳变沿表示过了一个PWM周期
{
value3 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); //检测完一个周期的那个上升沿为value3
capture_flag |= 0x80; //标记捕获完了一个周期
Pulse_Width = value2 + OverflowCount_high * TIM1_Period_Value - value1 + 4; //经验值:再进行4个时钟的补偿
PWM_Period_ARR[PWM_Period_CNT++] = value3 + OverflowCount_high * TIM1_Period_Value + OverflowCount_low * TIM1_Period_Value - value1 + 7;
if(PWM_Period_CNT == 5)
{
PWM_Period = findMostFrequentNum(PWM_Period_ARR, 5);
PWM_Period_CNT = 0;
}
OverflowCount_high = OverflowCount_low = 0;//清空溢出计数
__HAL_TIM_CLEAR_IT(&htim1, TIM_IT_UPDATE);//清零中断标志位
}
else //正在检测PWM信号的第一个上升沿,意味着下次捕获下降沿
{
capture_flag &= 0x7F; //0X7F是0111 1111,清除PWM捕获完成标志,开始新一轮PWM周期捕获
value1 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); //第一个上升沿是value1
}
__HAL_TIM_DISABLE(htim);
__HAL_TIM_SET_COUNTER(htim, value1); //以value1为基准重新计数
TIM_RESET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1); //复位极性选择才能进行下行配置
TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_ICPOLARITY_FALLING); //下次下降沿捕获
__HAL_TIM_ENABLE(htim); //重开定时器
}
}
}
/**
* @brief (高级定时器TIM特有)更新溢出中断函数
*/
//void TIM1_UP_IRQHandler(void)
//{
// HAL_TIM_IRQHandler(&htim1);
//}
/**
* @brief 更新溢出回调函数
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
{
if((capture_flag & 0X80) == 0) //PWM的一个周期没检测完
{
if(capture_flag & 0x40) //在高电平期间溢出M次
{
OverflowCount_high++;
}
else //在低电平期间溢出N次
{
OverflowCount_low++;
}
}
else //PWM的一个周期检测完了
{
OverflowCount_high = 0;
OverflowCount_low = 0;
}
}
- ⚡连续读取的数值中获取出现频率最高的数值实现方法:
//比较函数,用于排序
int compare(const void* a, const void* b)
{
return (*(int*)a - * (int*)b);
}
uint32_t findMostFrequentNum(uint32_t arr[], int size)
{
// 对数组进行排序
qsort(arr, size, sizeof(int), compare);//需要包含stdlib.h头文件
int maxCount = 1; // 最大重复次数
int currentCount = 1; // 当前元素的重复次数
uint32_t mostFrequentNumber = arr[0]; // 最频繁出现的数
for(int i = 1; i < size; i++)
{
if(arr[i] == arr[i - 1])
{
// 如果当前元素与前一个元素相同,则重复次数加1
currentCount++;
}
else
{
// 如果当前元素与前一个元素不同,则重复次数重置为1
currentCount = 1;
}
if(currentCount > maxCount)
{
// 如果当前元素的重复次数超过最大重复次数,则更新最大重复次数和最频繁出现的数
maxCount = currentCount;
mostFrequentNumber = arr[i];
}
}
return mostFrequentNumber;
}
- 📗main函数代码以及相关变量定义:
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
volatile char capture_flag = 0; //捕获状态标记变量,0x80最高位标记捕获完一个周期,0x40表示捕获到了上升沿
volatile uint8_t OverflowCount_high = 0; //高电平期间溢出次数
volatile uint8_t OverflowCount_low = 0; //低电平期间溢出次数
volatile uint32_t value1, value2, value3; //下图中三个边沿中的值
volatile uint32_t Pulse_Width = 0; //脉宽
volatile uint32_t PWM_Period = 0; //周期
uint32_t PWM_Period_ARR[5] = {0};
uint8_t PWM_Period_CNT = 0;
/* USER CODE END PV */
int main(void)
{
/* USER CODE BEGIN 1 */
uint32_t TimerUART;
// uint16_t plusewidth = 500;//脉冲宽度;f=1000 000/500=2000Hz
// uint16_t plusedelay = 20;//脉宽40us
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
MX_TIM14_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
uint32_t sysclock = 0;
//sysclock =RCC_GetHSIFreq();
sysclock = HAL_RCC_GetSysClockFreq();//RCC_GetHSIFreq()
TimerUART = HAL_GetTick();
printf("STM32F030 SysClockFreq:%d \r\n", sysclock);
// __HAL_TIM_SET_AUTORELOAD(&htim14, plusewidth - 1); //调整分频系数,可以改变arr以改变频率
// __HAL_TIM_SET_COMPARE(&htim14, TIM_CHANNEL_1, plusedelay); //PWM脉冲宽度,修改占空比比较值
/* 使能PWM输出 */
HAL_TIM_PWM_Start(&htim14, TIM_CHANNEL_1);
/* 清零中断标志位 */
__HAL_TIM_CLEAR_IT(&htim1, TIM_IT_UPDATE);
/* 使能定时器的更新事件中断 */
__HAL_TIM_ENABLE_IT(&htim1, TIM_IT_UPDATE);
/* 使能输入捕获 */
HAL_TIM_IC_Start_IT(&htim1, TIM_CHANNEL_1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while(1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if((HAL_GetTick() - TimerUART) > 1000)
{
printf("/********************/\r\n");
printf("脉宽为: %d us\r\n", Pulse_Width);
printf("周期为: %d us\r\n", PWM_Period);
printf("/********************/\r\n");
TimerUART = HAL_GetTick();
}
}
/* USER CODE END 3 */
}
- 📜测试调试输出:
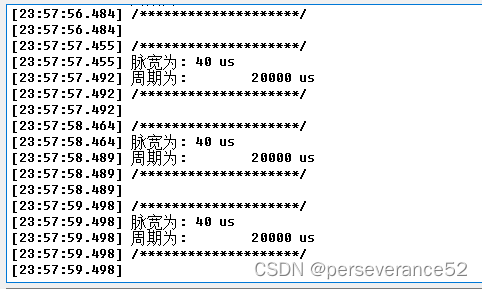
- ✨修改PWM相关参数测试了几次,结果也没有发现测量的输出结果异常,符合预期。
📚测试工程
链接:https://pan.baidu.com/s/1pgs9OFyiI291pxBMsuutdQ
提取码:rotp
定时器1双通道输入捕获实现脉宽和周期计数
- 基于STM32F446
- 中断处理函数:
/**
* @brief 输入捕获回调函数
* @retval None
*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef* htim)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
__HAL_TIM_CLEAR_FLAG(htim, TIM_FLAG_CC1); //清除中断标志位
__HAL_TIM_SET_COUNTER(htim,0 ); // 重装载计数器值 0
// HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
PWM_CYCLE = htim1.Instance->CCR1;
if(OverflowCount > 0)
{
PWM_CYCLE += OverflowCount*65536;
}
OverflowCount = 0; // 溢出次数清零
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
__HAL_TIM_CLEAR_FLAG(htim, TIM_FLAG_CC2); //清除中断标志位
PWM1_Duty = htim1.Instance->CCR2;
if (OverflowCount > 0) // 如果计数器溢出过
{
PWM1_Duty += OverflowCount * 65536;
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin); // LED闪烁
}
}
}
/**
* @brief 更新溢出回调函数
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef* htim)
{
if (__HAL_TIM_GET_IT_SOURCE(htim,TIM_FLAG_UPDATE) != RESET) //计数器更新中断
{
__HAL_TIM_CLEAR_FLAG(htim, TIM_FLAG_UPDATE); //清除中断标志位
OverflowCount++;
}
if(OverflowCount >= 1000) //每1000个溢出周期更新一次PWM占空比
{
OverflowCount = 0;
// printf("PWM1_Duty=%d,PWM_CYCLE=%d\r\n",PWM1_Duty,PWM_CYCLE);
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin); //LED闪烁
}
}
- main执行内容:
......
/* USER CODE BEGIN 2 */
/* 使能输入捕获 */
HAL_TIM_IC_Start_IT(&htim1, TIM_CHANNEL_1); //上升沿输入捕获中断
HAL_TIM_IC_Start_IT(&htim1, TIM_CHANNEL_2); //上升沿输入捕获中断
__HAL_TIM_CLEAR_FLAG(&htim1,TIM_FLAG_UPDATE); //清除中断标志位
__HAL_TIM_CLEAR_FLAG(&htim1,TIM_FLAG_CC1); //清除中断标志位
__HAL_TIM_CLEAR_FLAG(&htim1,TIM_FLAG_CC2); //清除中断标志位
Tick_Time = HAL_GetTick(); //获取当前时间
/* USER CODE END 2 */
......
while (1)
{
if (Tick_Time+1000 < HAL_GetTick()) //每隔1秒更新一次PWM占空比
{
printf("PWM1_Duty=%d,PWM_CYCLE=%d\r\n",PWM1_Duty,PWM_CYCLE);
Tick_Time = HAL_GetTick();
HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin); //LED闪烁
}
}
- 由于定时器输入捕获计数器(CCR2)溢出问题,只能测量大于12Hz的信号,小于100KHz。
- 🔖此文章仅作为个人学习探索知识的总结,不作为他人或引用者的理论依据,由于学识所限,难免会出现错误或纰漏,欢迎大家指正。


















 1350
1350

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









