







 本文详细介绍了如何在Ubuntu 16.04上安装ROS Kinetic,并通过ROS运行rplidar A1的Hector SLAM。首先,配置Ubuntu存储库,添加ROS源,安装ROS Kinetic桌面完整版。接着,初始化rosdep,创建工作空间,安装必要的工具。然后,连接并测试rplidar A1,确保其正常工作。最后,介绍了如何安装和运行Hector SLAM,实现激光雷达的数据处理和建图。
本文详细介绍了如何在Ubuntu 16.04上安装ROS Kinetic,并通过ROS运行rplidar A1的Hector SLAM。首先,配置Ubuntu存储库,添加ROS源,安装ROS Kinetic桌面完整版。接着,初始化rosdep,创建工作空间,安装必要的工具。然后,连接并测试rplidar A1,确保其正常工作。最后,介绍了如何安装和运行Hector SLAM,实现激光雷达的数据处理和建图。
ubuntu16.04上 Ros Kinetic 跑 rplidar A1的 Hector Slam
ROS 上跑rplidar Hector Slam
天了噜~这是我第一次写 优快云 。小白也是刚刚接触ros和激光slam,因为没有看到ubuntu16.04的ros安装,所以想记录下来,也想把余下的做好,所以第一篇,第二篇````每一篇我都会认真,作为自己的监督。
好啦,那就开始啦?!
ROS
ROS作为机器人操作系统并不是一个像Windows、Linux那样可以独立运行的操作系统,他需要运行在Linux环境下。所以运行ROS的前提是电脑要装有Linux系统,我的是Ubuntu。安装之前需要注意的问题是ROS版本通常与Ubuntu版本是一一对应的:
ROS Melodic 仅支持Ubuntu Artful(17.10)、Bionic(18.04 LTS)和Debian Stretch
ROS Kinetic 仅支持Wily (15.10) and Ubuntu Xenial (16.04 LTS)和Jessie (Debian 8)
ROS Jade 仅支持Trusty (14.04)、Utopic (14.10) 和 Vivid (15.04)。
ROS Indigo 仅支持 Saucy (13.10) 和 Trusty (14.04)。
ROS Hydro 仅支持Precise(12.04)、Quantal(12.10)和Raring(13.04)。
- 安装过程参考ROS的中文版WIKI: http://wiki.ros.org/kinetic/Installation/Ubuntu
1.1 配置Ubuntu存储库
将Ubuntu存储库配置为允许“restricted,”、“universe”和“multiverse”。(其实这步我没有做什么,只是看了一眼。。 至于怎么打开的软件和更新,按windows ,然后输入 ,软件和更新就可以了)
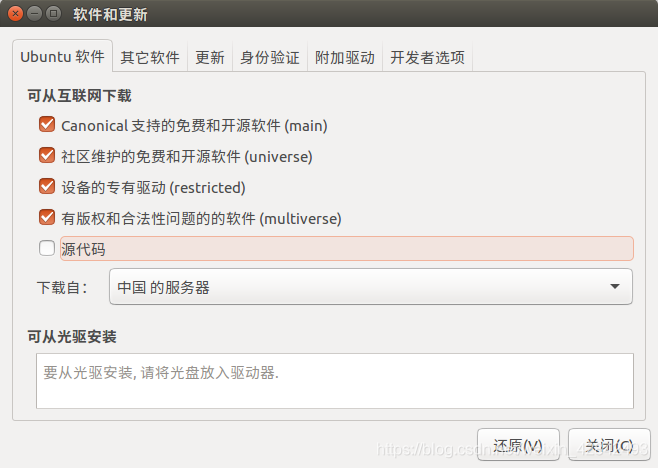
(注:在Ubuntu中打开终端的快捷键是Ctrl+Alt+T,开始配置环境吧)
1.2添加 sources.list
sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
1.3添加Keys
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
1.4安装
先更新Debian软件包索引
sudo apt-get update
安装桌面完整版(包含ROS、rqt、rviz、通用机器人函数库、2D/3D仿真器、导航以及2D/3D感知功能):
sudo apt-get install ros-kinetic-desktop-full
1.5初始化 rosdep
sudo rosdep init
rosdep update
1.6环境设置
每次启动新的shell时,如果将ROS环境变量自动添加到您的bash会话中,这很方便:
echo “sourc
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1291
1291

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









