






在我参加比赛的时候,我花了点时间,参考了网上的各种摄像头识别图像算法(虫随法,摩尔邻域跟踪算法,八邻域链码边界跟踪算法,生长算法,canny边缘检测算子),探索出了一种高效的识别算法,经测试,该算法要比生长算法抑或是八邻域算法要简单的多,同时执行效率也不逞多让。
硬件:鹰眼摄像头,镜头广度无要求
软件:IAR
思路:我定义了四个方向,使其作为我们基础算子的奔跑方向.让我们的黑色像素按照图像的边沿进行奔跑
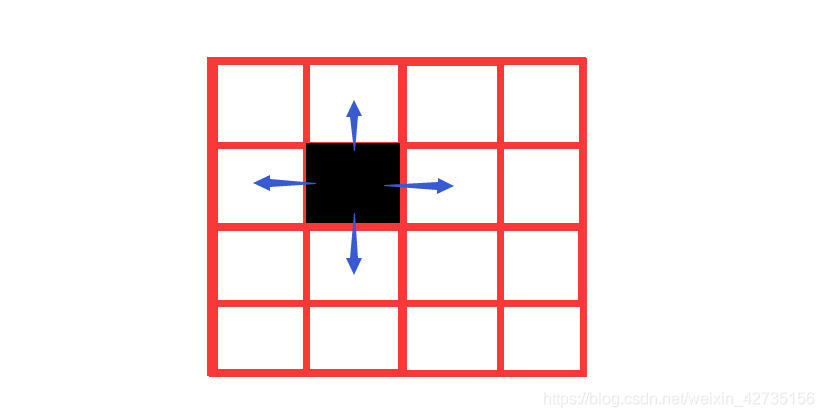
从图中我们可以看到每一个元素都有且仅有四个运动方向,我的算法并不会从一个点跳转到另一个明显不连接的点,算法最终产出的是一条比较粗的边缘线,因为具有边沿特征.的像素点是相连接的!
那么什么是所谓的四方向算子呢,重点来了重点来了哦,敲黑板敲黑板.

















 3080
3080

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









