







基本思想:
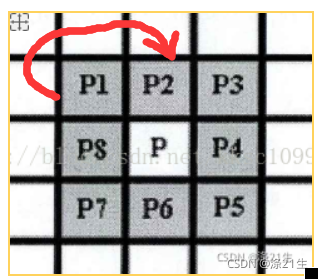
(1)从一个封闭空间的左上角像素点开始,如下图中的p1点,以该点为起始点。
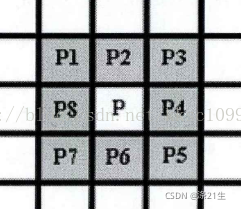
从该起始点的领域的空白像素点,以逆时针方向寻找,直到找到下一个边界点(图中为P2)。
2.每次遇到黑色像素点(即边界点) ,将它设置为当前边界像素点,然后原路返回到先前到达的白色像素,以顺时针方向搜索当前点的8邻域内的每一个像素,直到遇到下一个黑色像素。
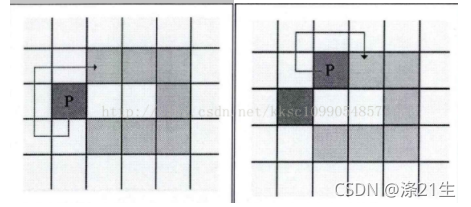
3,重复步骤2,直到第二次访问到初始边界点,终止。在整个运行过程走过的黒色像素就是目标的边界像素。
基本思想:
(1)从一个封闭空间的左上角像素点开始,如下图中的p1点,以该点为起始点。
从该起始点的领域的空白像素点,以逆时针方向寻找,直到找到下一个边界点(图中为P2)。
2.每次遇到黑色像素点(即边界点) ,将它设置为当前边界像素点,然后原路返回到先前到达的白色像素,以顺时针方向搜索当前点的8邻域内的每一个像素,直到遇到下一个黑色像素。
3,重复步骤2,直到第二次访问到初始边界点,终止。在整个运行过程走过的黒色像素就是目标的边界像素。
 4729
4729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























