







第三章讲了如何表示位姿,但实际位姿是未知的,需要估计,估计是有误差的,需要优化,进而将位姿估计问题转化为优化问题
总结图
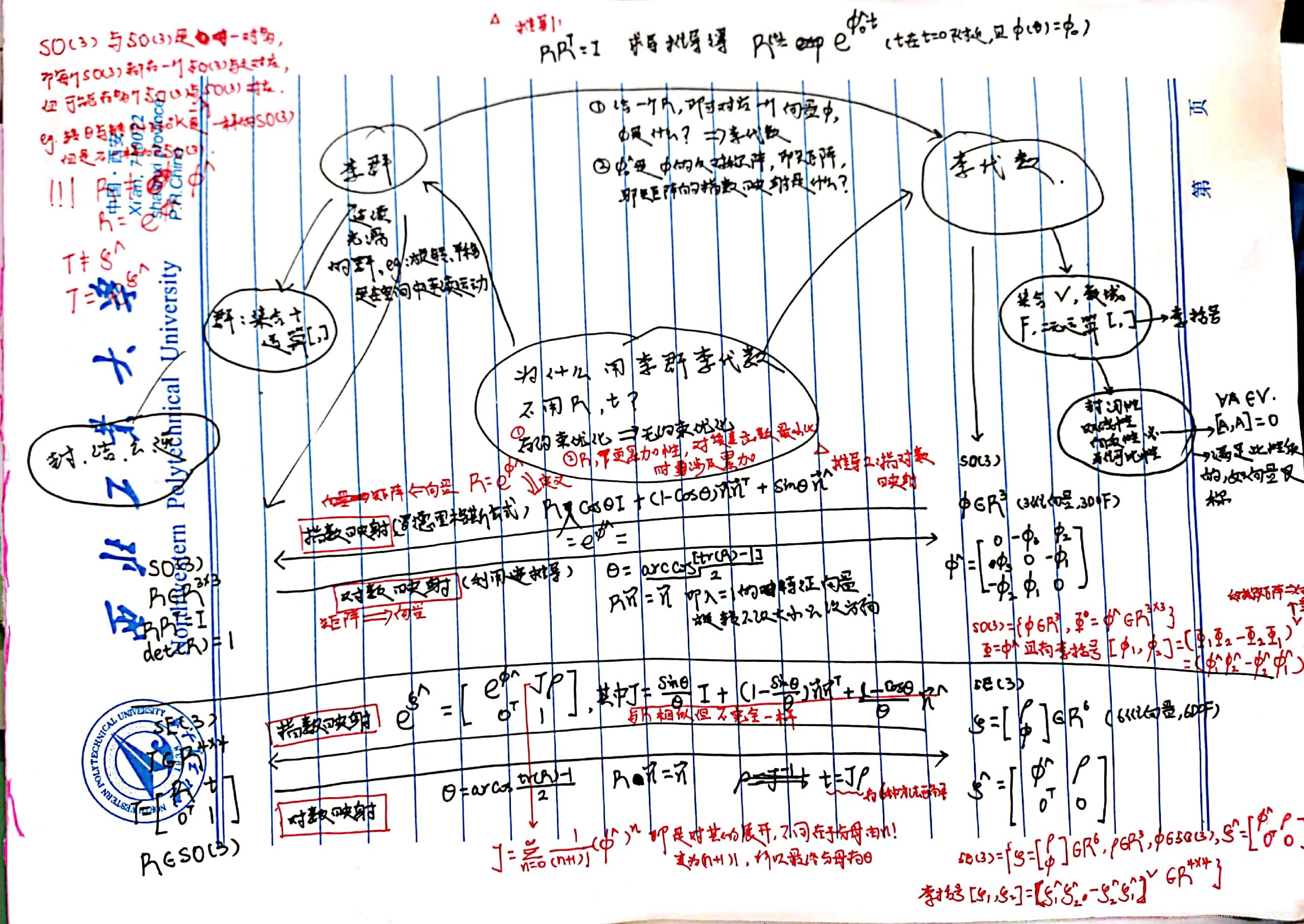
1.为什么需要李代数,不用R和t
- 将有约束的优化转为无约束的:R是一个旋转矩阵,是正交阵且行列式为1,自身存在约束。
- R和T只有累乘,没有累加性,但是很多损失函数也就是优化对象都是累加的
2.什么是群?什么是李群
- 群:集合+运算
- 满足性质:封,结,幺,逆
- 一般线性群:GL,n*n的可逆矩阵,对乘法成群
特殊正交群:SO,旋转矩阵
特殊欧氏群:SE,n维欧式变换
李群:具有连续光滑性质(可微)的群。SO和SE在实数空间(可以连续旋转),是李群。
3. 由李群引出李代数
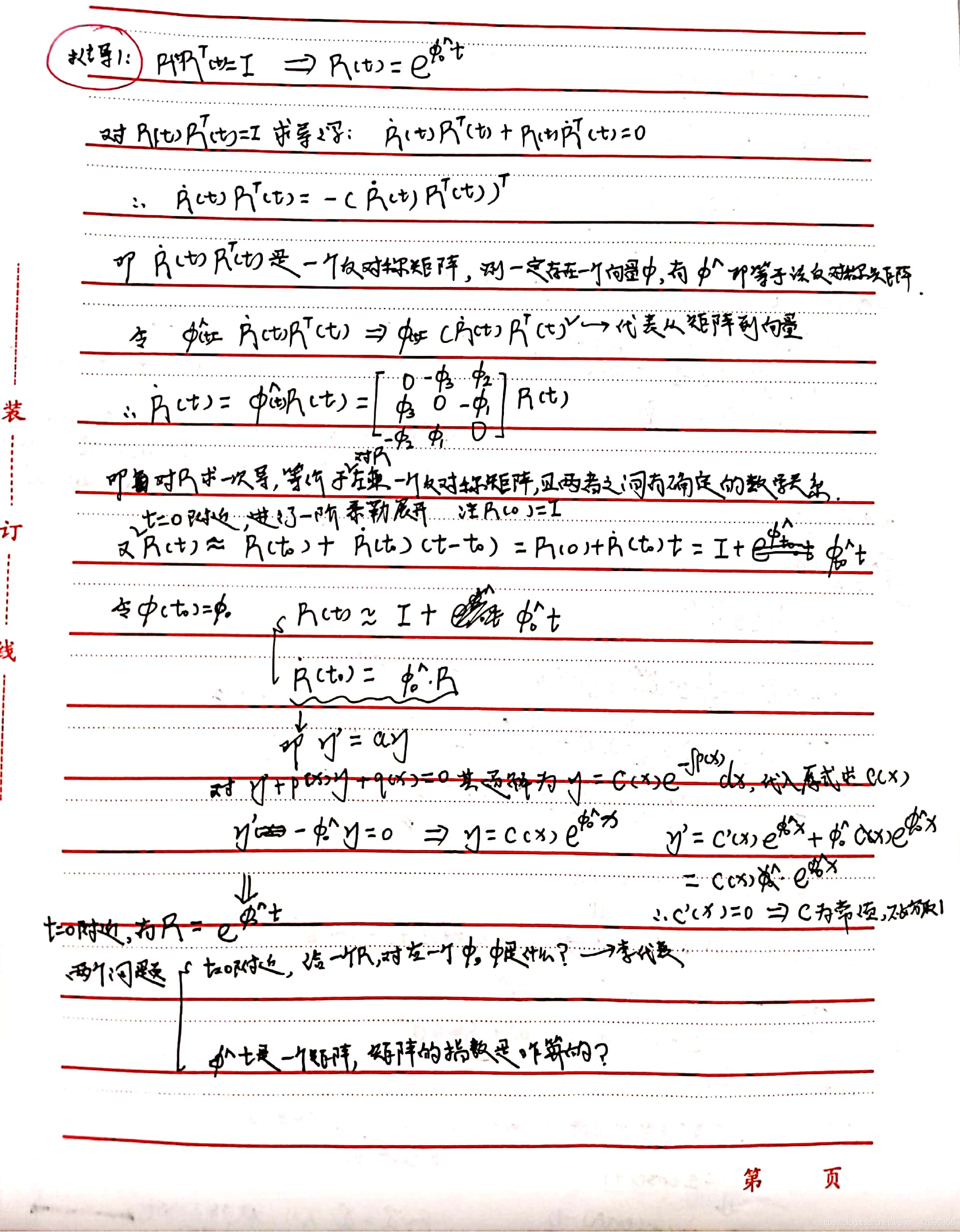
R (t) = exp(φ^t)
即旋转矩阵是某个向量的反对称矩阵的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1400
1400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









