




1 Intro
基于学习的方法对深度估计有非常好的效果,然而现存的方法都是监督学习需要大量的训练数据,本文作者提出一种单视图的深度估计方法,且不需要ground truth depth data。
2 Method
建立一种training loss去check左右一致性,可以使训练在不需要ground truth的监督。
2.1 Depth Estimation as Image Reconstruction
这里的想法是,给定一对经过校准的双目摄像机,如果能够学习一个从一个图像重建到另一个图像的函数,那么就已经学习了一些关于这些图像的三维形状的信息。
那么该方法就是试图找到一个dense correspondence field dr,通过左图可以重建右图。d就对应于image的disparity(这就是模型要去预测的每个像素的标量值),通过disparity来重建depth。
2.2 Depth Estimation Network
该网络可以通过左视图同时推断left-to-right和right-to-left的disparities,并且通过使左右disparities达到一致性来增强深度估计的效果。

Naively learning:通过从左图像来生成右视图disparity会并且与左视图的采样共同产生output即右视图。
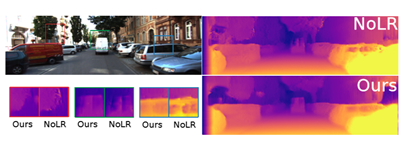
No LR:但是作者希望得到的disparity与input左视图对应,因此生成left view aligned disparity map,但是问题是这样会在深度不连续的地方产生失真和错误,下图可以看出:
CVPR2017 Oral【论文笔记】Unsupervised Monocular Depth Estimation with Left-Right Consistency
最新推荐文章于 2021-11-05 17:45:21 发布
 本文介绍了一种无需大量标记数据的单视图深度估计方法。通过建立训练损失检查左右图像的一致性,该方法能够在没有地面真实深度数据的情况下进行训练。模型通过学习从一个图像重建到另一个图像的过程,获取三维形状信息,从而预测每个像素的深度。
本文介绍了一种无需大量标记数据的单视图深度估计方法。通过建立训练损失检查左右图像的一致性,该方法能够在没有地面真实深度数据的情况下进行训练。模型通过学习从一个图像重建到另一个图像的过程,获取三维形状信息,从而预测每个像素的深度。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 440
440

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









