







简介:Q学习是强化学习中的一种无模型算法,通过与环境交互更新Q表以估计动作的期望奖励。EE5904课程的CA2部分专注于Q学习在网格世界中的应用,使用MATLAB实现该算法涉及初始化Q表、选择动作、执行并更新Q值等步骤。项目包含主文件、Q学习算法文件、网格世界模拟器和结果展示代码。为了优化Q学习的性能,可以采用学习率和ε衰减、经验回放缓冲区和贝尔曼方程离线更新等策略。Q学习在游戏控制、机器人导航、资源调度等领域具有广泛的应用前景。 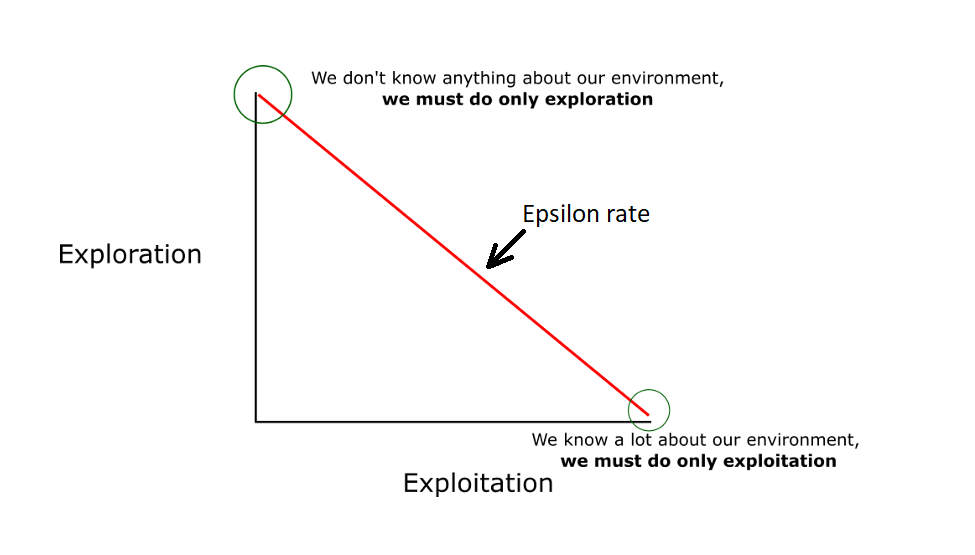
1. Q学习算法简介
Q学习是强化学习的一个重要分支,它通过与环境的不断交互,利用试错的方式,来学习在特定状态下采取何种动作可以获得最大化的长期累积奖励。本章将概述Q学习的基本概念、历史背景及在各种问题中的适用性,为读者提供一个全面的理解框架。
1.1 Q学习的发展历程
Q学习算法由Watkins在1989年提出,最初是作为一种无需环境模型的强化学习方法。它的核心思想是通过更新一个动作值函数(即Q值)来逐步改善策略,直到找到最优策略。Q学习的出现是强化学习领域的一个里程碑,因为它提供了一种在复杂或未知环境中进行有效学习的方法。
1.2 Q学习与其他强化学习方法的比较
Q学习与其他强化学习方法相比,如Sarsa和深度Q网络(DQN),在算法实现和使用上有着显著的区别。Q学习是一个在线学习算法,它不需要建立环境的精确模型,这使得它在处理实际问题时更为灵活。然而,Q学习也有其局限性,比如对高维状态空间的处理能力有限,因此后续发展出了各种改进版本和衍生算法。
1.3 Q学习的适用范围和优势
Q学习适合于那些状态空间相对较小,且能够获得即时奖励的场景。它的优势在于算法简单、易于实现,并且理论基础坚实。Q学习在游戏AI、机器人导航、资源管理等多个领域得到了广泛应用。通过一些特定的优化技术,Q学习也可以被应用到更复杂的问题中,如通过深度学习技术来处理大规模的状态空间问题。
2. 强化学习基础概念
2.1 强化学习的定义和特点
强化学习是机器学习的一个分支,其核心思想是通过与环境的交互来学习最优行为策略。不同于传统的监督学习或无监督学习,强化学习更加侧重于决策过程的学习。
2.1.1 强化学习的基本定义
强化学习是人工智能中的一个重要领域,它研究如何通过环境的反馈(即“奖励”或“惩罚”)来指导智能体自主学习决策策略。在强化学习中,智能体不断地尝试各种动作,并根据环境反馈调整其行为,以期在未来获得更大的累积奖励。
2.1.2 强化学习的核心组成部分
强化学习的核心组成部分包括智能体(Agent)、环境(Environment)、状态(State)、动作(Action)和奖励(Reward)。智能体通过选择动作来影响环境状态,而环境对每个动作提供奖励作为反馈,以帮助智能体学习。
2.1.3 强化学习与其他机器学习方法的区别
强化学习的最大特点在于其“试错”的学习过程,它不同于监督学习中对已有标签数据的学习,也不同于无监督学习中的模式识别。强化学习强调的是动态决策过程中的学习和适应,目标是最大化长期累积奖励,而不仅仅是一次性决策。
2.2 强化学习的关键术语和理论
2.2.1 状态、动作和奖励的概念
- 状态(State):环境所处的某种特定情况,是智能体可以观测和利用的信息。
- 动作(Action):智能体在给定状态下可以选择执行的行为。
- 奖励(Reward):环境给予智能体的即时反馈,是学习目标的导向信号。
2.2.2 马尔可夫决策过程(MDP)
马尔可夫决策过程是强化学习中的一个基本数学框架,用于描述决策的随机过程。MDP假设当前状态完全取决于前一个状态和前一个动作,且与更早历史无关(马尔可夫性质),并拥有明确的奖励函数和状态转移概率。
2.2.3 策略、价值函数和模型
- 策略(Policy):智能体根据当前状态选择动作的规则。
- 价值函数(Value Function):预测在特定状态下按照某个策略所能获得的期望累积奖励。
- 模型(Model):描述环境状态转移和奖励产生机制的数学模型。
2.3 强化学习的学习方法
2.3.1 有模型的学习方法
有模型学习需要学习环境的转移概率和奖励函数,典型算法包括值迭代(Value Iteration)和策略迭代(Policy Iteration)。
2.3.2 无模型的学习方法
无模型学习不直接学习环境模型,而是通过与环境的交互直接学习最优策略。Q学习是无模型学习中的一种重要算法。
# Q学习算法的一个简单Python实现示例
# 假设环境状态和动作都已经定义好
# Q表格初始化
Q_table = np.zeros((state_count, action_count))
# Q学习的主要参数
alpha = 0.1 # 学习率
gamma = 0.9 # 折扣因子
epsilon = 0.1 # 探索率
# 伪代码实现Q学习
for episode in range(num_episodes):
state = env.reset()
done = False
while not done:
# 按照ε-贪婪策略选择动作
if random.random() < epsilon:
action = random.choice(range(action_count))
else:
action = np.argmax(Q_table[state])
# 执行动作并观察新状态和奖励
next_state, reward, done = env.step(action)
# Q表更新公式
Q_table[state, action] = Q_table[state, action] + alpha * (reward + gamma * np.max(Q_table[next_state]) - Q_table[state, action])
# 更新状态
state = next_state
2.3.3 基于价值的算法
基于价值的算法主要关注价值函数的估计和优化,其中Q学习是其代表算法之一。通过更新Q值来逼近最优策略的价值函数,实现策略的改进。
3. Q学习在网格世界中的应用
3.1 网格世界问题概述
网格世界的定义和问题描述
网格世界是强化学习中的一个简单而经典的环境,它提供了一个用于理解和解决强化学习问题的直观框架。在这个环境中,智能体(agent)在一个由网格组成的有限世界中移动,每个网格代表一个状态。智能体的目标是通过一系列移动(动作)到达目标状态,同时可能避开危险或惩罚状态。网格世界问题的经典版本,也被称为“迷宫”问题,能够很好地展示强化学习的基本概念,如状态、动作、奖励和策略。
在网格世界中,问题描述可以有多种形式,例如,找到从起点到终点的最短路径,或者在最小化惩罚的情况下最大化获得奖励的路径。网格世界问题可以用一个二维数组来表示,每个单元格代表一个状态,每个状态可以根据其位置赋予不同的奖励值。为了解决这个问题,智能体需要学习一种策略,根据当前状态选择动作,以达到预期的目标。
网格世界中的状态和动作空间
在网格世界问题中,状态空间由网格中的所有单元格组成。每个单元格可以被视为一个状态,智能体可以从一个状态移动到另一个状态,前提是这两个状态在网格上是相邻的。动作空间通常包括上、下、左、右四个方向的移动,这些动作能够将智能体从当前状态转移到一个新的状态。
为了使问题具有挑战性,可能会在某些状态中添加障碍物,使得智能体无法通过这些状态,或者为某些状态分配负奖励(惩罚),以此来模拟“陷阱”或“危险区域”。智能体必须学会避免这些状态,同时找到通往目标状态的最优路径。
网格世界的奖励系统设计
奖励系统是强化学习中激励智能体学习的关键机制。在网格世界中,奖励系统的设计影响着智能体的学习过程和最终策略的形成。奖励可以是正向的,也可以是负向的。正向奖励鼓励智能体在执行某个动作后保持或重复这一行为,而负向奖励(惩罚)则促使智能体避免执行导致惩罚的动作。
通常,目标状态会给予正向奖励,以表示任务完成;起点状态可能有一个小的正向奖励,鼓励智能体开始行动;而障碍物或惩罚状态则会被赋予负向奖励。智能体在探索环境的过程中,通过尝试不同的动作并观察随后的奖励来学习。通过这种方式,它逐渐构建起一个策略,即在每个状态下应执行的动作。
在设计奖励系统时,一个重要的考虑是奖励的稀疏性。在稀疏奖励环境中,奖励非常有限,智能体可能在很长一段时间内得不到任何反馈,这增加了学习的难度。而在密集奖励环境中,智能体会频繁获得反馈,这有助于加快学习过程。因此,合理设计奖励系统对于网格世界的Q学习应用至关重要。
3.2 Q学习在网格世界中的作用
Q学习解决网格世界问题的机制
Q学习是一种无模型的强化学习算法,其核心思想是通过学习一个状态-动作的值函数(Q函数)来找到最优策略。在网格世界问题中,Q学习通过不断地探索环境和更新Q值来实现对环境的理解和学习。智能体在每个状态尝试不同的动作,并观察随后的状态和奖励,然后根据一个更新规则(如贝尔曼方程)来更新Q值表。
在网格世界中,Q学习算法尝试寻找一个最优策略,即在任何给定的状态下选择能够最大化预期未来奖励的动作。为了实现这一点,算法维护一个Q表,其中Q(s,a)的值代表在状态s下执行动作a所能获得的预期回报。Q学习通过试错的方式,逐步调整Q表中的值,使得智能体能够根据学习到的Q表选择动作,最终达到目标状态。
状态空间和动作空间的映射
在网格世界中,状态空间映射到Q表中的行,而动作空间映射到Q表中的列。Q表的每个条目Q(s,a)对应于在特定状态下执行特定动作的预期回报。例如,如果一个网格世界有5x5的状态空间,且动作空间包含上下左右四个动作,则Q表将是一个5x5的矩阵,每个矩阵元素对应于一个状态-动作对的Q值。
Q学习算法在探索过程中会不断更新这个Q表。在每一步,智能体根据当前状态选择一个动作,根据Q值来估计这个动作的回报,然后执行该动作并转移到新状态。当智能体获得奖励后,它会使用以下更新规则来修改Q值:
Q(s,a) = Q(s,a) + α [r + γ max(Q(s',a')) - Q(s,a)]
这里的α是学习率,控制着学习的速度;r是智能体在执行动作后获得的即时奖励;γ是折扣因子,用于调节未来奖励的当前价值;max(Q(s',a'))是在新状态s'下所有可能动作的最大Q值。
奖励函数的设定与调整
在Q学习中,奖励函数的设定对智能体学习到的策略有极大的影响。在网格世界问题中,奖励函数的设计需要能够反映任务的目标和环境的特点。设定奖励函数的一个关键方面是选择何时以及如何向智能体提供正向或负向奖励。
正向奖励通常用于指示任务完成,例如在达到目标状态时给智能体一个正向奖励。负向奖励(或惩罚)则用于惩罚不利于达成目标的行为,比如进入一个惩罚区域或与障碍物碰撞。通过调整奖励的大小和分配方式,可以对智能体的行为产生直接的影响,引导它朝着期望的行为发展。
奖励函数的调整也与学习的收敛性和智能体行为的多样性密切相关。如果奖励过小,智能体可能无法获得足够的学习信号,导致学习过程缓慢;如果奖励过大,可能会导致学习过程不稳定,甚至出现过拟合现象。因此,找到一个合适的奖励函数是实现高效和稳定Q学习的重要部分。
在网格世界的实践中,奖励函数需要精心设计,以确保智能体能够发现并采取通往目标状态的路径。这涉及到对不同状态动作对的奖励分配进行平衡,使得智能体在面对各种选择时,能够作出最有利于达成目标的决策。此外,随着时间的推移,可以对奖励函数进行调整和优化,以改善智能体的表现和学习效果。
3.3 网格世界中的Q学习应用示例
为更好地理解Q学习在网格世界中的应用,可以考虑一个具体的例子。假设在一个简单的网格世界中,有一个智能体需要从起点(S)移动到目标点(G),同时避开危险区域(X)。在这个环境中,智能体可以选择上、下、左、右四个动作,每个动作都会使它移动到相邻的格子。
以下是一个简化的Q学习应用示例:
# Q学习示例代码
import numpy as np
# 设置学习参数
alpha = 0.1
gamma = 0.99
epsilon = 0.1
# 初始化Q表,这里使用一个空的字典
Q = {}
# 状态空间和动作空间
states = ['S', 'G', 'X', 'M1', 'M2', 'M3', 'M4']
actions = ['up', 'down', 'left', 'right']
# 状态转换函数,用于描述智能体在执行动作后如何转移状态
def state_transition(state, action):
# 为简单起见,这里省略了转换逻辑
pass
# 学习过程
for episode in range(1000):
# 从起点开始
s = 'S'
# 每个回合,智能体采取行动直到达到目标或失败
while s != 'G':
# 随机选择动作,增加探索的概率
a = np.random.choice(actions) if np.random.random() < epsilon else max(Q[s], key=Q[s].get)
# 执行动作并获取新状态和奖励
r = 0 # 奖励初始化为0
if a == 'right':
s_prime = state_transition(s, a)
if s_prime == 'G':
r = 10 # 达到目标状态
# 其他动作的转换和奖励省略
# Q值更新
Q[s] = Q.get(s, {})
Q[s][a] = Q[s].get(a, 0) + alpha * (r + gamma * max(Q.get(s_prime, {}).values()) - Q[s].get(a, 0))
# 输出最终的Q表
print(Q)
上述代码是一个非常简化的Q学习示例,它展示了在网格世界中如何通过Q学习来学习策略。代码中省略了奖励的具体逻辑以及状态转换的实现细节,但它体现了Q学习算法的核心思想:智能体通过尝试不同的动作并更新Q值表来学习如何从起点到达目标点。
通过这个例子,我们可以看到Q学习是如何处理网格世界问题的,它通过迭代更新Q表来逐步改进其策略。Q学习算法的性能依赖于学习率、折扣因子和探索概率的合理设置,同时也需要一个良好设计的奖励系统来保证学习过程的效率和有效性。在实际应用中,需要对这些参数进行调整和优化,以适应具体的问题和环境。
通过理解这个简单的网格世界例子,我们能够更深入地掌握Q学习在解决更复杂问题中的应用。
4. MATLAB中Q学习的实现步骤
4.1 MATLAB环境下的Q学习基础
4.1.1 MATLAB在机器学习和强化学习中的应用
MATLAB(Matrix Laboratory的缩写)是一个高性能的数值计算环境,广泛应用于工程计算、数据分析、算法开发等领域。它是MathWorks公司推出的一套专业数值分析、可视化软件,它提供了丰富的数学函数库以及交互式开发环境,便于快速实现和验证算法。
在机器学习和强化学习领域,MATLAB同样提供了强大的支持,其内置的工具箱和函数库可以方便地处理数据、构建模型、进行模拟和可视化。通过Machine Learning Toolbox和Reinforcement Learning Toolbox,研究人员和工程师可以迅速搭建学习框架,测试算法性能,以及进行模型的训练和评估。
4.1.2 MATLAB中Q学习算法的安装和配置
要在MATLAB中使用Q学习算法,首先需要确保已安装了Reinforcement Learning Toolbox。这个工具箱提供了开发和测试强化学习算法所需的各种组件,包括环境、代理(agent)、学习算法等。
安装完成后,需要配置MATLAB的路径,以便能够调用相关的函数和工具箱。这通常可以通过MATLAB的路径管理器来完成,把相关工具箱的安装目录添加到MATLAB的搜索路径中。此外,为了能够运行示例,还建议检查并安装MATLAB的样例数据和文件。
4.2 MATLAB实现Q学习的步骤详解
4.2.1 环境设置与参数初始化
在MATLAB中实现Q学习算法的第一步是设置环境和初始化参数。环境的设置包括定义状态空间、动作空间和奖励函数。在网格世界问题中,状态空间可以定义为网格上的所有位置,动作空间则是指在每个状态下可采取的动作,如向上下左右移动。
在MATLAB代码中,这些设置通常涉及到创建相关的矩阵和向量,以及初始化Q表,也就是一个用来存储每个状态-动作对值的矩阵。参数初始化涉及到的还有学习率(alpha)、折扣因子(gamma)等,这些参数将在学习过程中控制更新策略。
% 定义环境参数
states = 1:16; % 假设一个4x4的网格世界
actions = {'up', 'down', 'left', 'right'}; % 可能的动作
alpha = 0.1; % 学习率
gamma = 0.9; % 折扣因子
epsilon = 0.1; % 探索率
% 初始化Q表
Q = zeros(length(states), length(actions));
4.2.2 Q表的构建和更新策略
在Q学习中,Q表是核心数据结构,记录了在特定状态下采取特定动作时的预期回报。构建Q表的过程包括选择动作和更新Q值。
选择动作时,可以使用ε-贪婪策略,这是一种平衡探索(exploration)和利用(exploitation)的方法。大部分时间选择当前已知最好的动作(利用),小部分时间随机选择其他动作(探索)。
Q值的更新依赖于Q学习公式: Q(s,a) = Q(s,a) + alpha * ( reward(s,a) + gamma * max(Q(s',allActions)) - Q(s,a) ) ,其中s和a是当前状态和动作,s'是采取动作后的状态,reward是奖励函数。
% 模拟动作选择和Q值更新
% 假设当前状态为1,动作为'up'
current_state = 1;
current_action = 'up';
[~, bestAction] = max(Q(current_state, :));
[~, secondBestAction] = max(Q(current_state, :), ~bestAction);
next_state = ... % 根据动作获得新状态
reward = ... % 根据状态获得奖励
% 更新Q表
Q(current_state, current_action) = Q(current_state, current_action) + ...
alpha * (reward + gamma * Q(next_state, bestAction) - Q(current_state, current_action));
4.2.3 算法的收敛性分析
Q学习算法的目标是学习到最优策略,使得在所有可能的策略中能够获得最大的累积奖励。算法的收敛性分析是指分析Q学习算法是否会收敛到最优的Q值。
一般认为,如果学习率足够小,折扣因子在0到1之间,并且每个状态-动作对被访问无限次,那么Q学习算法将收敛到最优策略对应的Q值。然而,在实际应用中,可能会因为探索率、环境的复杂性等因素而影响收敛速度和稳定性。
% 算法参数初始化
numEpisodes = 1000; % 总的学习周期数
numSteps = 100; % 每个周期中的最大步数
% 开始Q学习过程
for episode = 1:numEpisodes
state = 1; % 初始状态
for step = 1:numSteps
% 选择动作
% ... epsilon-greedy策略代码 ...
% 执行动作,到达新状态
% ... 执行动作和环境交互代码 ...
% 更新Q表
% ... Q表更新代码 ...
% 检查是否达到终止条件
% ... 终止条件判断代码 ...
end
end
4.3 MATLAB代码实践和案例分析
4.3.1 编写MATLAB代码实现Q学习
实现Q学习的MATLAB代码通常包括定义环境、初始化参数、循环迭代地进行学习过程以及存储学习到的Q值。在MATLAB中,可以利用脚本或者函数来组织这些代码,以便进行模块化管理。
function [Q_table, rewards] = q_learning(alpha, gamma, epsilon, numEpisodes, numSteps)
% 定义状态空间、动作空间等
% 初始化Q表和奖励数组
% 循环迭代进行Q学习
for episode = 1:numEpisodes
state = ... % 初始化状态
for step = 1:numSteps
action = ... % 选择动作
next_state = ... % 执行动作并获取新状态
reward = ... % 计算奖励
Q_table = ... % 更新Q表
state = next_state; % 更新状态
% 记录每个步骤的奖励
rewards(episode, step) = reward;
end
end
% 返回学习到的Q表和每步奖励
end
4.3.2 代码调试和运行结果分析
编写完MATLAB代码后,需要进行调试以确保代码能够正确执行。调试过程包括检查语法错误、逻辑错误、循环条件和边界条件等。在MATLAB中,可以使用断点、单步执行和变量检查等调试工具。
运行代码后,需要分析结果,这通常涉及到绘制学习过程中的奖励变化图、Q值表的收敛情况等。通过这些分析,可以判断算法是否收敛,学习效果如何,并据此对学习过程进行调整。
4.3.3 案例解读:MATLAB在网格遍历中的应用
以网格遍历问题为例,一个智能体(agent)需要在4x4的网格世界中从起点移动到终点,过程中避免障碍物,并学习如何在最少的步骤内完成任务。在这个案例中,使用MATLAB可以构建一个Q学习模型,智能体通过与环境的交互来学习最佳行动策略。
代码实现中,需要定义网格世界的环境,包括障碍物位置、起点和终点。然后,智能体通过执行Q学习算法,学习在不同状态下采取何种动作。在这个过程中,智能体会逐步构建起一个Q表,其中包含了每个状态和动作对的预期收益值。通过多轮训练,智能体能够找到最优路径,并且Q表也会趋于稳定。
最终,通过分析Q学习的结果,可以得到网格遍历的最佳策略,并可视化智能体的学习过程以及最终的学习路径。这不仅有助于理解Q学习算法的工作原理,也展示了其在解决实际问题中的应用潜力。
5. 网格遍历问题的模拟
5.1 网格遍历问题的理论背景
5.1.1 网格遍历问题的定义
网格遍历问题是一种经典的计算机科学问题,它要求找到一条从起点到终点的路径,在这个路径上,代理(例如机器人或者游戏中的角色)需要遍历网格中的每一个单元格至少一次。通常情况下,这个网格可以被看作是一个二维数组,而每个单元格则可以代表不同的状态或者环境情况。
网格遍历问题是强化学习领域的典型问题之一,尤其是适用于Q学习算法进行状态空间的探索。Q学习算法的目标是找到一系列最优动作策略,使得代理从网格的一个位置移动到另一个位置,达到提升整个遍历过程的效率和效果。
5.1.2 网格遍历问题与Q学习的结合
将网格遍历问题与Q学习结合,可以为算法提供一个具体的实践案例。在网格遍历中,代理需要学习在不同的状态(位置)下采取什么动作(移动方向),以达到遍历整个网格的目的,并最大化累计奖励。
这一过程中,Q学习算法的决策依赖于当前状态和动作的价值函数Q(s, a)。通过不断与环境互动(例如,代理在网格中移动并获取奖励或惩罚),算法逐渐更新Q值,最终能够找到一条效率最高的路径。
5.1.3 网格遍历问题的求解思路
求解网格遍历问题通常包括以下步骤:
- 确定网格的尺寸和初始状态,以及终止状态。
- 为网格中的每个状态定义可能的动作集合。
- 设置奖励函数,通常到达目标状态给予正奖励,而触碰到障碍或者边界可能获得负奖励或惩罚。
- 初始化Q表,设定学习率α,折扣因子γ,以及探索率ε。
- 采用Q学习算法,让代理在网格中移动,更新Q表中的Q值。
- 当代理能够稳定地达到目标状态时,算法结束,并输出代理的路径。
5.2 MATLAB网格遍历问题模拟
5.2.1 模拟环境的搭建
为了模拟网格遍历问题,我们需要在MATLAB中创建一个二维网格,并定义网格的状态、动作空间、奖励系统,以及代理的初始位置。
% 定义网格大小
gridSize = [10, 10]; % 10x10的网格
% 初始化网格状态,0表示空地,1表示墙壁,2表示目标点
grid = zeros(gridSize);
% 设置墙壁和目标位置
grid([3,3],[3,5]) = 1; % 位置[3,3]和[3,5]是墙壁
grid([7,7]) = 2; % 位置[7,7]是目标点
% 设置起始点
startPos = [1,1];
5.2.2 算法参数的设定和调整
在MATLAB中,我们需要定义Q学习算法的关键参数,包括学习率α,折扣因子γ,以及探索率ε。这些参数对于算法的性能和收敛速度至关重要。
alpha = 0.1; % 学习率
gamma = 0.9; % 折扣因子
epsilon = 0.1; % 探索率
% 其他可能需要设定的参数包括动作集合、状态集合等
5.2.3 模拟结果的分析和优化
在模拟实验中,我们运行Q学习算法,并记录代理遍历网格的过程以及每次移动后的奖励值。通过MATLAB的绘图工具,我们可以直观地展示代理的学习过程和路径。
% 运行Q学习算法并记录结果
% ...
% 绘制路径图
plotPath = grid;
plotPath(startPos) = 3; % 标记起始点
figure;
imagesc(plotPath);
axis square;
colormap([1 1 1; 0 0 0; 0 1 0]); % 白色为空地,黑色为墙壁,绿色为目标点
title('代理遍历网格路径图');
最终,我们将通过模拟结果分析代理的学习效果,并针对不同的参数配置对算法性能进行优化。这可能包括调整学习率、折扣因子等参数,或是对动作集合和状态集合进行细化。
在下一节中,我们将具体实现Q学习算法,并通过代码实践和案例分析深入理解网格遍历问题的解决过程。
6. Q学习项目文件结构与功能
6.1 Q学习项目文件组织结构
6.1.1 项目文件的目录结构
在进行Q学习项目开发时,一个合理的文件组织结构可以显著提高代码的可维护性、可扩展性以及团队协作的效率。典型的Q学习项目文件结构可能包含以下目录:
-
src:存放所有源代码文件。 -
data:用于存储训练数据和结果数据。 -
models:存放训练好的模型文件。 -
results:用于存放算法的输出结果,如训练结果图表等。 -
scripts:存放运行脚本、配置文件或参数文件。 -
tests:存放单元测试或集成测试代码。 -
docs:文档目录,存放项目说明文档、用户手册或技术文档等。 -
notebooks:Jupyter Notebook或类似格式的交互式文档,用于数据探索和分析。
6.1.2 主要文件和脚本的功能描述
项目中的每个文件和脚本都有其特定的功能和目的,以下是一些关键文件和脚本的描述:
-
main.py:项目的主要入口文件,负责启动训练或测试流程。 -
train.py:包含训练算法的详细流程,如环境初始化、模型训练循环等。 -
test.py:用于评估训练好的模型在测试数据上的性能。 -
environment.py:定义Q学习环境,包括状态空间、动作空间和奖励机制。 -
agent.py:实现Q学习智能体,包括学习策略和行为选择逻辑。 -
utils.py:存放工具函数,如绘图函数、数据处理函数等。
6.1.3 文件依赖关系和调用机制
在Q学习项目中,文件之间的依赖关系决定了调用顺序和模块之间的交互方式。例如:
-
environment.py需要在train.py和test.py中被导入,以创建可交互的环境。 -
agent.py会根据environment.py中定义的环境接口,实现策略选择和学习更新。 -
main.py会依次调用train.py和test.py,以执行完整的训练和评估流程。
6.2 Q学习项目各功能模块解析
6.2.1 环境模拟模块
环境模拟模块是强化学习中的关键组件,它负责提供学习的“舞台”,即智能体与之交互的环境。以下是环境模块的关键组成部分:
- 状态空间 :定义了环境中所有可能的状态,状态的表示方式取决于问题的复杂度。
- 动作空间 :描述了智能体可以执行的所有动作,通常对应于解决问题所需的步骤或选择。
- 奖励函数 :决定了智能体执行动作后的即时反馈,影响智能体的学习过程。
示例代码展示了如何在Python中定义一个简单的网格世界环境:
class GridWorld:
def __init__(self, width, height):
self.width = width
self.height = height
# 初始化状态空间等
def reset(self):
# 重置环境状态
pass
def step(self, action):
# 根据动作更新环境状态,并返回新的状态、奖励和终止标志
pass
6.2.2 策略学习模块
策略学习模块负责实现智能体的决策过程。在Q学习中,它主要通过Q表或Q函数来实现。以下是一些关键点:
- Q表更新 :根据从环境中获得的奖励和下一个状态,智能体更新其Q表中的值,通常使用贝尔曼方程进行更新。
- 探索与利用 :智能体在探索(尝试新的或未知的动作)和利用(选择已知最优的动作)之间需要平衡,这通常通过诸如epsilon-greedy策略来实现。
示例代码展示了如何在Python中实现Q表更新:
def q_learning_update(state, action, reward, next_state, q_table, learning_rate, discount_factor):
"""
参数说明:
state: 当前状态
action: 当前动作
reward: 执行动作后获得的奖励
next_state: 执行动作后的新状态
q_table: Q表
learning_rate: 学习率
discount_factor: 折扣因子
"""
q_table[state][action] = q_table[state][action] + learning_rate * (reward + discount_factor * np.max(q_table[next_state]) - q_table[state][action])
6.2.3 结果展示模块
结果展示模块通常用于评估智能体的性能,并以可视化的方式向用户提供反馈。以下是一些关键点:
- 训练过程记录 :记录训练过程中的关键指标,如每次迭代的回报值。
- 结果可视化 :利用图表展示训练过程,帮助分析智能体性能和学习趋势。
示例代码展示了如何在Python中使用matplotlib库绘制训练过程的回报值图:
import matplotlib.pyplot as plt
def plot_rewards(rewards, title="Training Rewards"):
plt.figure(figsize=(10, 5))
plt.plot(rewards)
plt.title(title)
plt.xlabel("Episode")
plt.ylabel("Reward")
plt.show()
6.3 项目的扩展和优化
6.3.1 代码的模块化和封装
为了保持项目的可维护性和可读性,需要对代码进行模块化和封装。关键点包括:
- 代码的高内聚和低耦合 :保证每个模块完成一个单一的功能,同时减少模块间的依赖。
- 接口清晰 :为每个模块提供明确的接口,便于其他模块调用。
6.3.2 项目的可维护性和可扩展性
一个良好的项目结构应便于未来维护和扩展,这包括:
- 文档完善 :详细说明每个模块、函数或类的作用、参数和返回值。
- 代码重构 :定期重构代码,消除冗余和不规范的部分,提升代码质量。
6.3.3 对接其他机器学习库和工具
为了提高项目的功能性和灵活性,可以考虑对接其他流行的机器学习库和工具:
- 数据预处理 :使用如scikit-learn的库来辅助进行数据预处理。
- 模型训练 :使用深度学习框架(如TensorFlow或PyTorch)来实现更复杂的策略网络。
以上内容展示了Q学习项目文件结构与功能的细节,以及如何组织项目文件,设计功能模块,以及如何进行项目的扩展和优化,以确保项目能够灵活应对各种开发需求和维护挑战。
7. Q学习性能优化策略
Q学习算法作为强化学习中的经典算法之一,其性能直接决定了问题解决的质量与效率。为了使算法达到最佳效果,本章将详细探讨Q学习的性能分析、优化方法以及针对实际问题的性能优化案例。
7.1 Q学习性能分析
性能评价是优化算法的前提,对Q学习算法而言,性能主要从以下指标进行评价:
7.1.1 性能评价指标
- 收敛速度 :指算法收敛到最优解或稳定解所需要的迭代次数。
- 学习稳定性 :指算法在整个学习过程中的稳定性,即值函数估计是否在合理范围内波动。
- 策略质量 :最终得到的策略是否能够稳定地获得较高的奖励。
7.1.2 学习效率和稳定性分析
为了提高学习效率和稳定性,可以通过调整学习率(α)、折扣因子(γ)和探索与利用策略(ε-greedy)来实现。
7.1.3 过拟合和欠拟合的识别与处理
识别Q学习是否出现过拟合或欠拟合,主要看训练模型是否能够泛化到未见过的状态。处理方法包括:
- 正则化 :给目标Q值增加惩罚项。
- 早停法 (Early Stopping):在验证集上表现不再提升时停止训练。
- 数据增强 :通过模拟不同的环境或状态来增加训练数据的多样性。
7.2 Q学习优化方法探讨
本小节介绍几种优化Q学习性能的方法。
7.2.1 学习率和折扣因子的调整
- 学习率(α) :影响到每次更新时新旧信息的比例,应随学习过程递减。
- 折扣因子(γ) :对未来奖励的重视程度,高的γ值鼓励长期规划。
7.2.2 探索与利用(Exploration vs. Exploitation)策略
- ε-greedy策略 :一定概率进行随机探索,其余时间利用已知信息选择最优动作。
- Softmax选择 :基于动作价值的概率分布来选择动作,平衡探索与利用。
7.2.3 异常状态和动作处理
在实际应用中,会遇到异常状态或动作。可以通过以下方式进行处理:
- 异常检测 :监测Q表中非正常的更新,并进行调试。
- 动作/状态空间缩减 :限制动作或状态的范围,避免无效探索。
7.3 实际问题中的性能优化案例
接下来,我们通过一个具体案例来展示性能优化的实践过程。
7.3.1 实际问题的Q学习模型构建
假设我们需要解决一个机器人路径规划问题,环境是未知的,需要机器人通过不断尝试学习出最优路径。
7.3.2 性能优化实践
- 使用动态调整的学习率α,随着学习进程递减。
- 折扣因子γ设置为0.9,以鼓励长期规划。
- 初始采用较高的探索概率ε,随着学习次数的增加逐步降低ε值。
- 引入动作折扣因子,对频繁执行的动作进行调整,避免路径过于单一。
- 设计异常状态识别机制,并在遇到时回退到上一个稳定状态。
7.3.3 案例总结与经验分享
通过上述优化,机器人成功在限定次数内找到了最优路径。本案例中,优化的效果明显,学习过程的稳定性得到显著提升。最重要的是,经过实际测试,该策略在现实环境中也显示出了很好的泛化能力。
通过本章的分析,我们可以得出性能优化是提升Q学习算法性能的关键步骤。在实际应用中,需要针对具体问题进行细致的调整和优化。性能优化不仅仅是对算法参数的调整,还包括了算法结构、学习过程和策略的选择等多方面的综合考量。
简介:Q学习是强化学习中的一种无模型算法,通过与环境交互更新Q表以估计动作的期望奖励。EE5904课程的CA2部分专注于Q学习在网格世界中的应用,使用MATLAB实现该算法涉及初始化Q表、选择动作、执行并更新Q值等步骤。项目包含主文件、Q学习算法文件、网格世界模拟器和结果展示代码。为了优化Q学习的性能,可以采用学习率和ε衰减、经验回放缓冲区和贝尔曼方程离线更新等策略。Q学习在游戏控制、机器人导航、资源调度等领域具有广泛的应用前景。

















 822
822

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









