






前言
GNSS/IMU组合导航不同之处体现在三个方面:对惯性导航参数如何校正;使用什么类型的GNSS观测量;INS和组合算法如何辅助GNSS接收设备。
按照以上三方面的组合方式,划分为非耦合、松耦合、紧耦合、深耦合等。
一、非耦合
指GNSS简单为以一定的时间间隔,重置惯性导航参数。
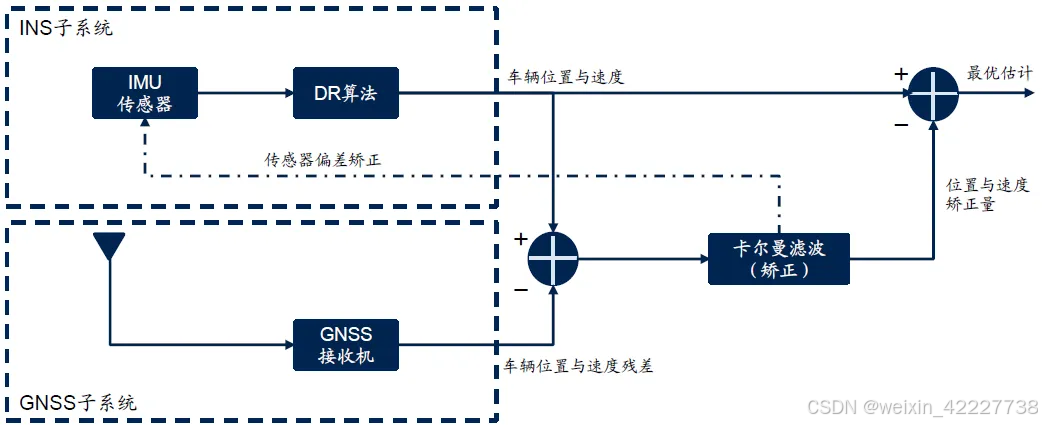
二、松耦合
指INS独立进行机械编排(姿态更新,速度更新,姿态更新),而GNSS位置和速度作为组合算法的观测输入,将其融入到导航滤波器,因此松耦合是一个级联结构,称为位置域组合,即GNSS定位结果修正INS累积误差。
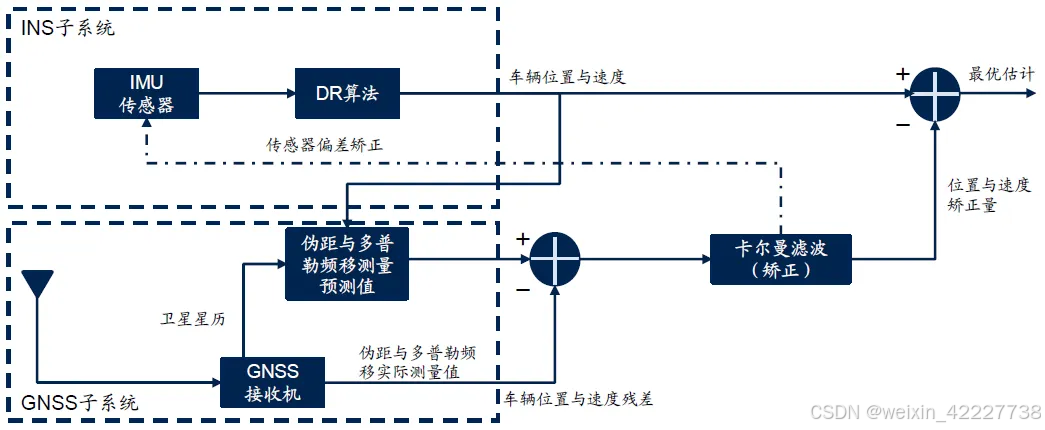
三、紧耦合
指使用GNSS伪距和伪距率、伪距增量或者ADR测量作为组合算法的输入,称为距离域组合,即INS与GNSS在观测量层面进行融合,GNSS观测量辅助INS,INS辅助GNSS数据处理,以提高精度和稳定性。
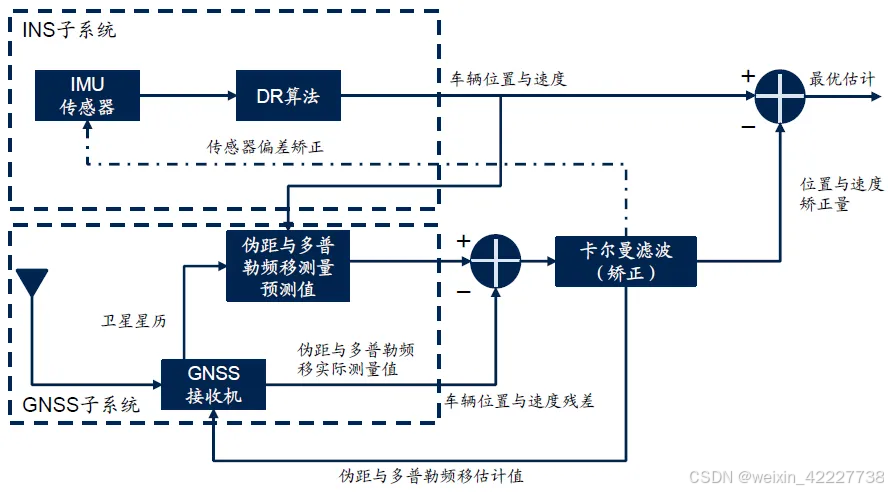
四、深耦合
指GNSS/INS组合和GNSS信号跟踪合并为单个估计算法。这种组合采用GNSS相关通道中的I和Q信号作为测量值,生成用于控制GNSS接收机中参考码和载波的NCO命令(即测距处理器的工作),称为跟踪域的组合。INS介入GNSS信号处理层面,INS辅助GNSS信号捕获、跟踪,可以改善GNSS动态灵敏度,动态精度,抗干扰性能。
五、对比
| 松耦合 | 紧耦合 | 深耦合 | |
|---|---|---|---|
| 信息融合深度 | GNSS导航结果 | GNSS观测量 | GNSS信号 |
| 接收机调整 | 不需要 | 导航解算 | 基带控制 |
| 实现难度 | 容易 | 较难 | 复杂 |
| 动态性能 | 一般 | 较好 | 优越 |
| 完好性 | 抗干扰能力差 | 少于4颗卫星持续更新 | 好,接收机观测质量改善 |
| 系统成本 | 一般需要战术级以上IMU器件 | 一般需要战术级以上IMU器件 | 较低,可采用MEMS IMU |
| 现状 | 低端商用 | 商用/军用 | 研究/军用 |
六、 其他
超紧耦合通常用来描述带有GNSS跟踪环辅助的跟踪域和距离域的组合,而紧密耦合用于位置域和距离域的组合。
参考资料
https://www.bynav.com/cn/resource/bywork/healthy-work/757.html


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









