







 本文详细介绍Autoware安装过程中必须配置的软件包及解决常见问题的方法,包括使用pip和apt-get安装各种ROS相关的库,确保Autoware系统正常运行。
本文详细介绍Autoware安装过程中必须配置的软件包及解决常见问题的方法,包括使用pip和apt-get安装各种ROS相关的库,确保Autoware系统正常运行。
配置autoware必须安装的库:
pip install kvaser
sudo apt-get install -y python3-colcon-common-extensions
pip install canlib
sudo apt-get install ros-kinetic-velodyne
sudo apt-get install ros-kinetic-pcl_conversions
sudo apt-get install ros-kinetic-vision-opencv
sudo apt-get install libnlopt-dev freeglut3-dev qtbase5-dev libqt5opengl5-dev libssh2-1-dev libarmadillo-dev libpcap-dev gksu libgl1-mesa-dev libglew-dev python-wxgtk3.0 software-properties-common libmosquitto-dev libyaml-cpp-dev python-flask python-requests
sudo apt-get install ros-kinetic-controller-manager ros-kinetic-ros-control ros-kinetic-ros-controllers ros-kinetic-gazebo-ros-control ros-kinetic-joystick-drivers
sudo apt-get install ros-kinetic-nmea-msgs ros-kinetic-nmea-navsat-driver ros-kinetic-sound-play
sudo apt-get install ros-kinetic-grid-map ros-kinetic-gps-common
sudo apt-get install ros-kinetic-jsk-visualization
sudo apt-get install ros-kinetic-rviz
sudo apt-get install gfortran一开始必须要安装caffe GPU ,所以必须安装配置caffe
1、缺少cv_bridge模块,采用:
sudo apt-get install ros-kinetic-vision-opencv 解决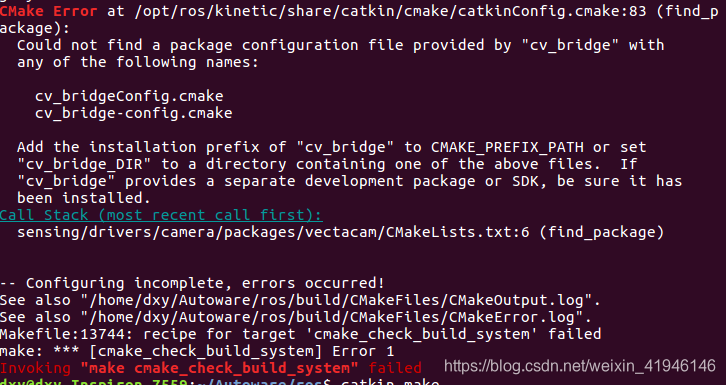
2、缺少pcl_conversions模块,解决办法是参考 Could not find a package configuration file provided by "pcl_conversions"_苏碧落-优快云博客 链接:
直接安装: 即可。
sudo apt-get install ros-kinetic-navigation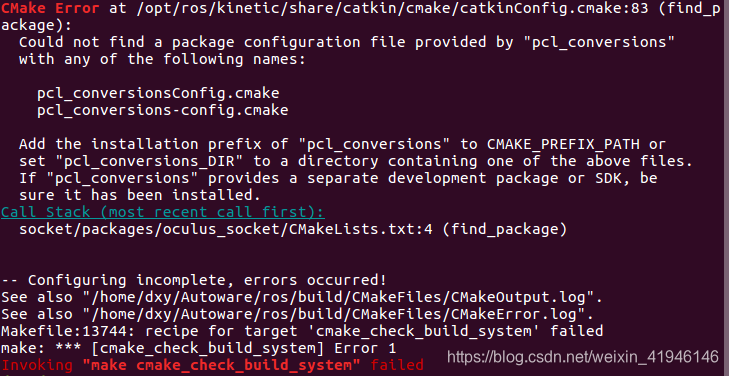
3、缺少jsk_rviz_plugins模块,解决
sudo apt-get install ros-kinetic-jsk-visualization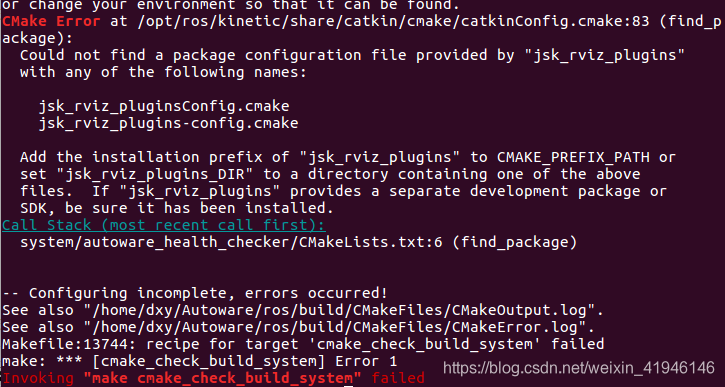
4、缺少velodyne_pointcloud模块, 解决
sudo apt-get install ros-kinetic-velodyne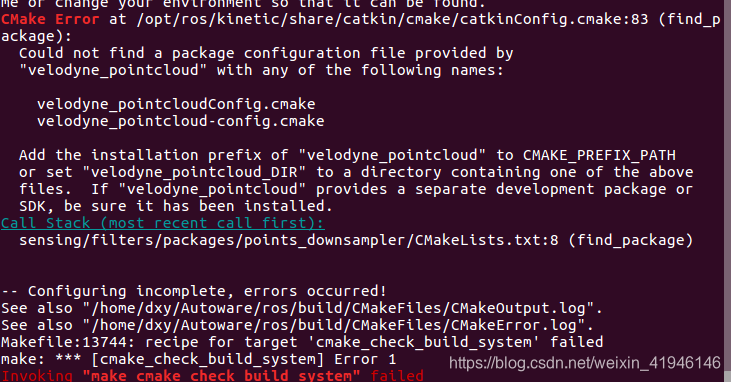
5、此错误没解决,换一种编译方式编译:
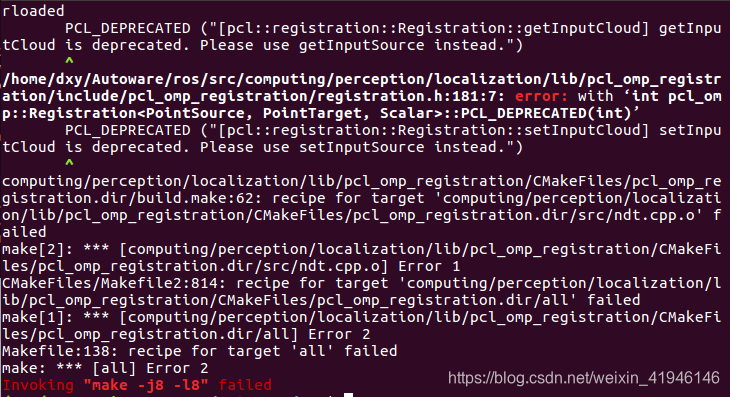
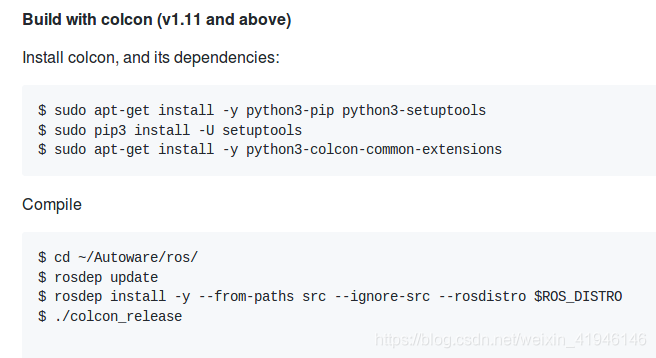
即可
6、运行demo的问题
a)在定位时setup_tf.lauch文件找不到,原因是launch文件地址写错,改过来就好。
b)下载的数据必须放在home下的.autoware中才行。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











