







 本文详细介绍如何在ROS环境中搭建工作空间,创建和使用自定义的消息和服务类型,以及如何通过编写简单的发布者和订阅者来测试这些自定义类型。
本文详细介绍如何在ROS环境中搭建工作空间,创建和使用自定义的消息和服务类型,以及如何通过编写简单的发布者和订阅者来测试这些自定义类型。
1、打开

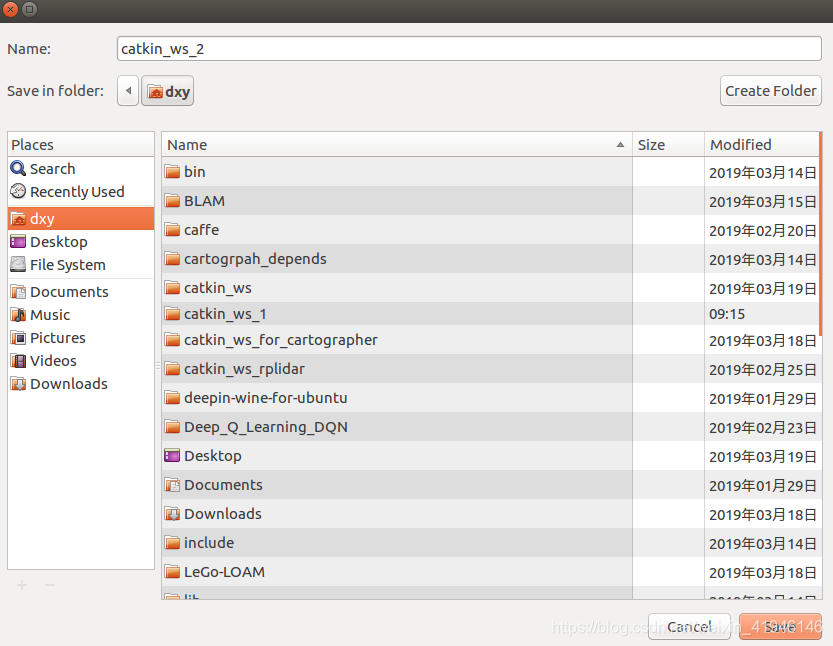
2、新建工作空间,catkin_ws_2,并点击save
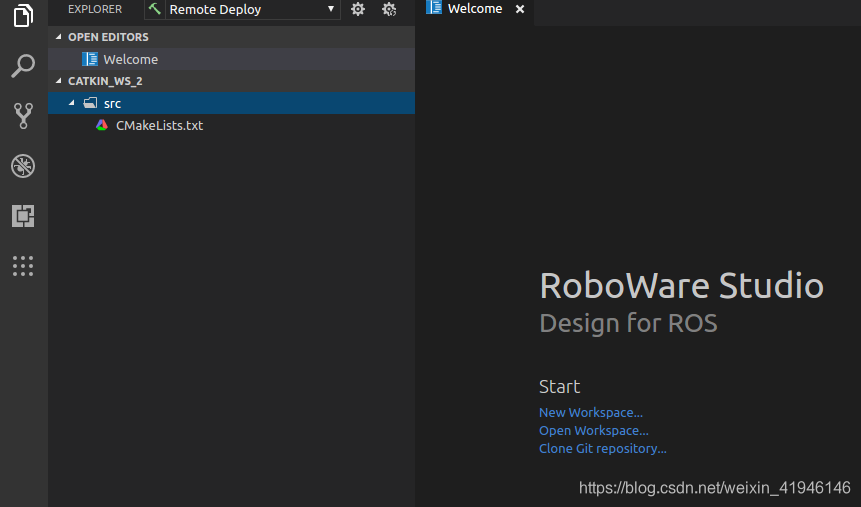
3、设置本地release,有关说明看下面截图


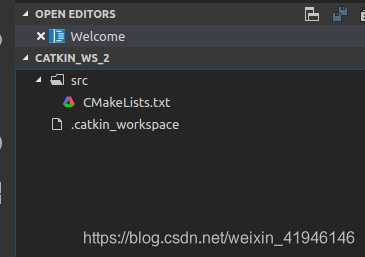
4、点击菜单栏中的ROS中build构建
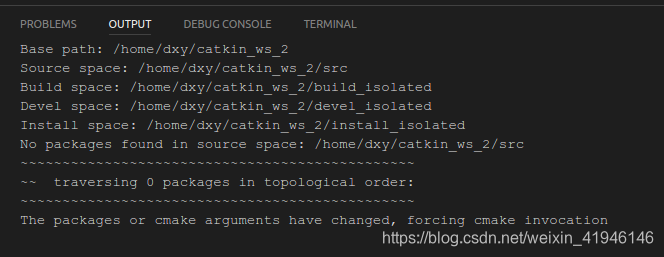
5、测试是否正常,点击菜单栏中的ROS中的Run roscore:ctrl + c 取消运行
6、添加ROS功能包,右键src,也可以建一个不加依赖的包,后期在右键编辑依赖的ROS包列表中添加也可
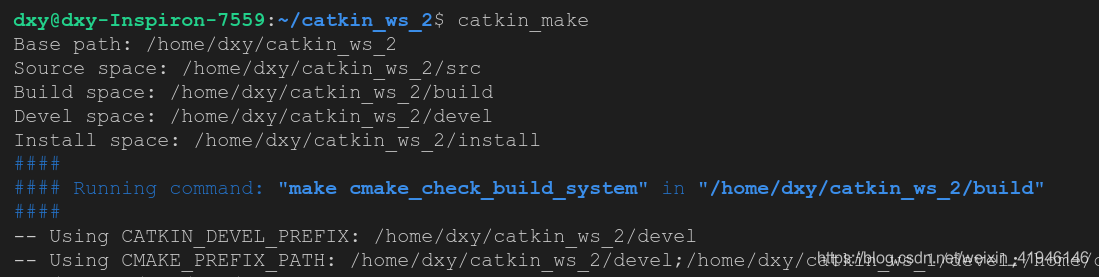
7、在查看-集成终端,可打开类似终端的界面,其实在ROS构建build后就可以找到终端,输入catkin_make进行初步编译,点击+号可以增加终端

8、创建ROS消息和ROS服务
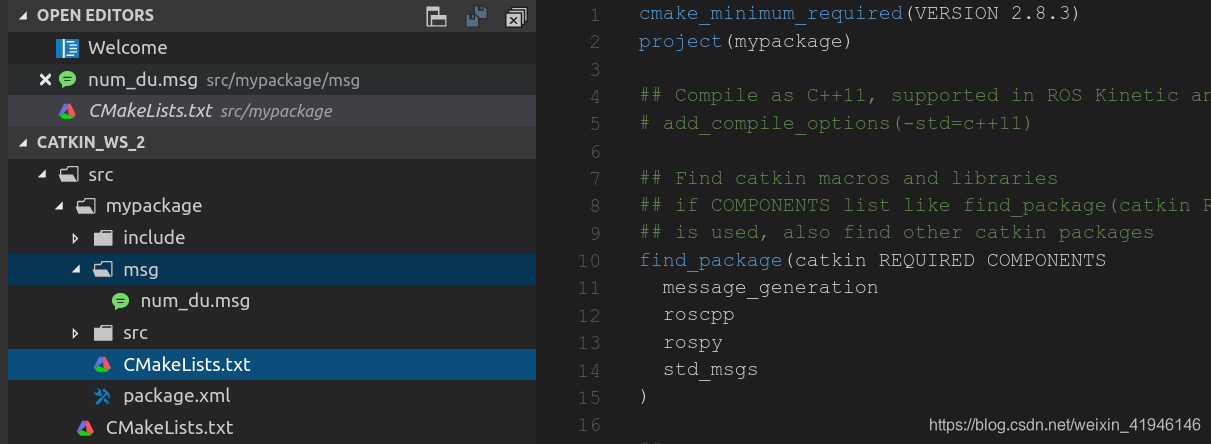
在mypackage右击,选择添加Msg文件add Msg file,并命名num_du.msg,然后回车,编辑num_du.msg
int64 num
string first_name
string last_name
uint8 age
uint8 score

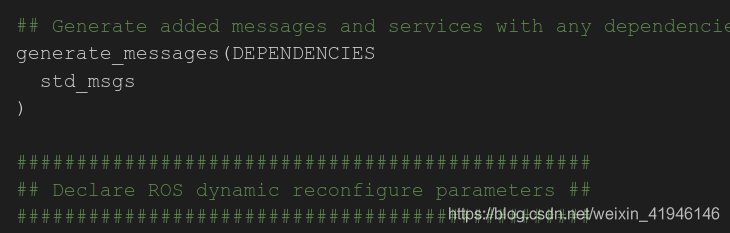
同时,CMakeList.txt也会自动加入一些依赖项(如果不是这个IDE,必须手动添加)

这个软件非常强大的体现
9、测试msg:
首先要确保新建的工作空间的环境变量添加到.bashrc中,第二呢就要用rospacke profile刷新一下,否则找不到这个新建的工作空间。

10、创建一个Srv空文件夹:
功能包右击选中Srv,并命名AddTwoints.srv,输入如下:同样,自动保存在CMakeLists.txt中:

11、在终端通过rossrv show 命令,检车ROS是否能够识别该服务:

12、重新编译我们的package:catkin_make
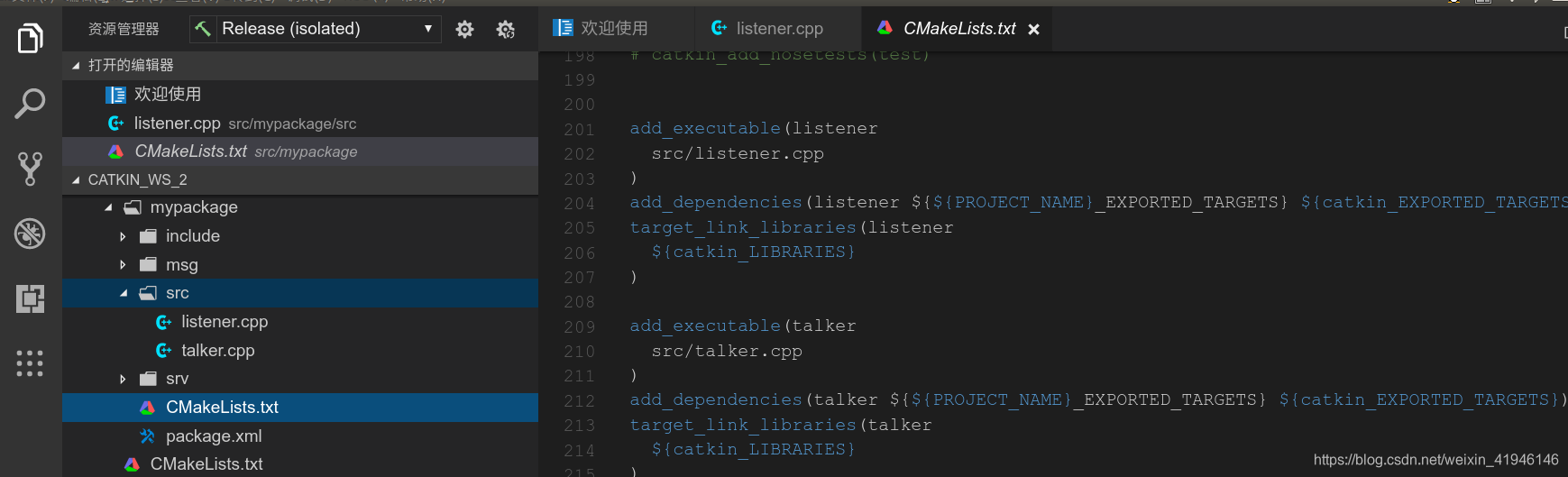
13、创建消息发布talker和订阅listener:
选中src并右击选择新建cpp源文件,然后分别命名为talker.cpp和listener.cpp,然后选中 加入到新的可执行文件中:
然后就可以编写代码:并发现CMkeList.txt自动更新了
14、然后catkin_make就可以开始重新编译功能包了
15、运行talker 和listener
打开第一个终端:运行roscore
打开第二个终端:rosrun mypackage talker
打开第三个终端:rosrun mypackage listener


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











