







RADIal数据集包含4D雷达原始数据和标注数据,论文可参考这篇博文
论文解读--Raw High-Definition Radar for Multi-Task Learning-优快云博客,这里主要是记录数据集的应用。
1 数据集构成
数据集可从google云盘下载,地址为RaDIaL - Google 云端硬盘,有如下文件。

其中raw_sequences和Ready_to_use文件夹下分别是ADC原始数据和做完2D-FFT的数据,使用不同的解析脚本读取并显示数据。
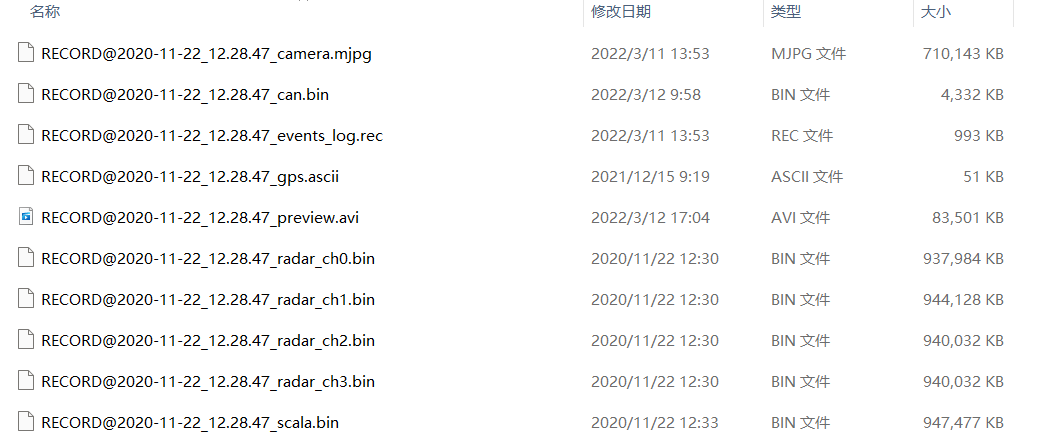
raw_sequences文件夹下是各个时间序列的数据,labels是标注数据。
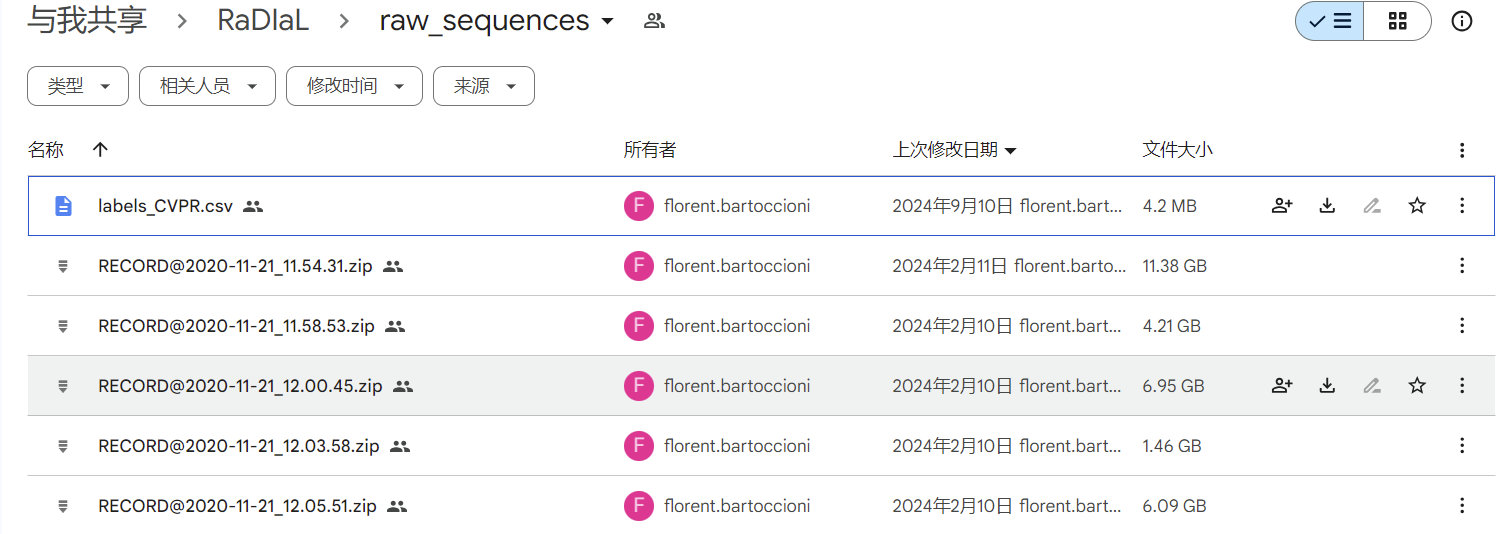
每组数据中包含视频数据、can数据、gps数据等。
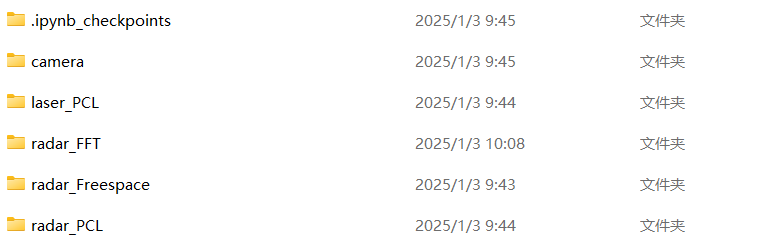
Ready_to_use文件夹下是做完2D-FFT的数据,可以直接调用使用。
2 Ready_to_use数据解析显示
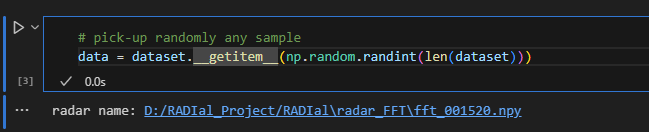
在RADIal的工程loader中可以直接调用该文件夹下的数据,使用如下图的juypter脚本运行代码。
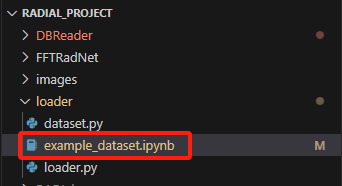
这里第2段代码是选择根目录,建议使用绝对路径,相对路径容易出现问题。

第3段代码是随机选择一组数据显示,调用_getitem函数读取fft数据,源代码61行有后缀arr_0,python不能识别,将其删除后可正常读取数据。

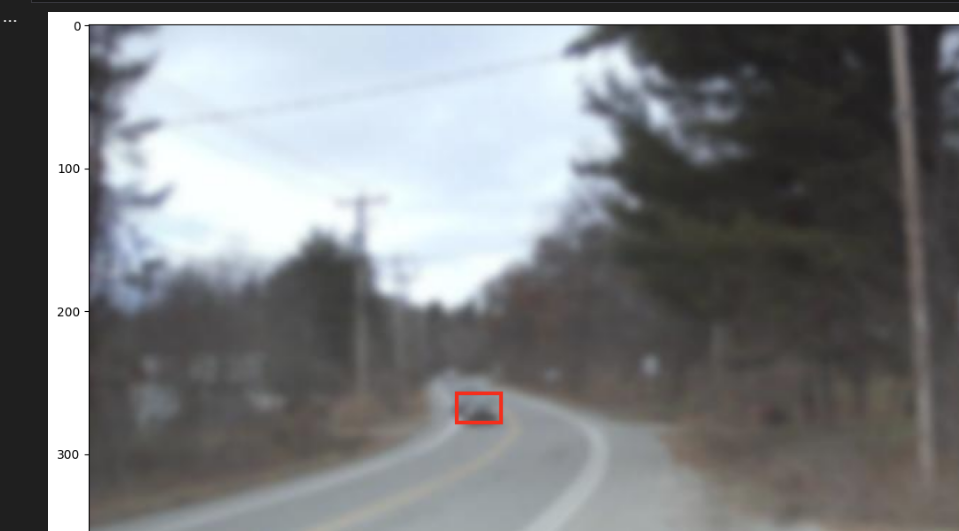
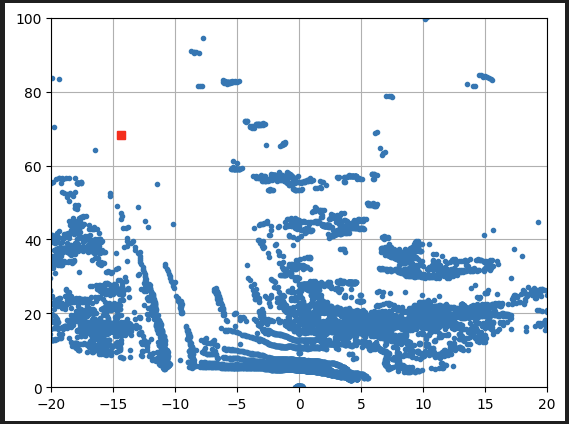
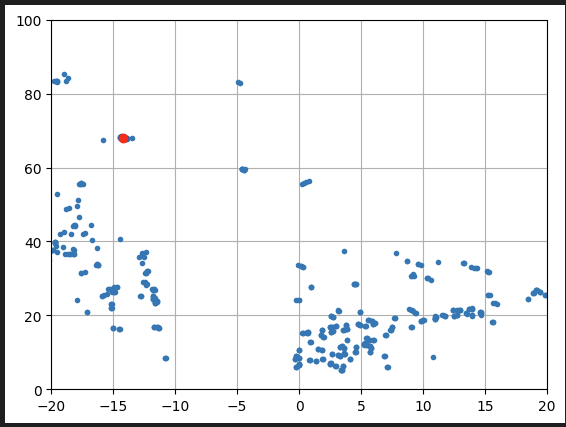
后续调用显示图片、激光点云、毫米波雷达点云如下:
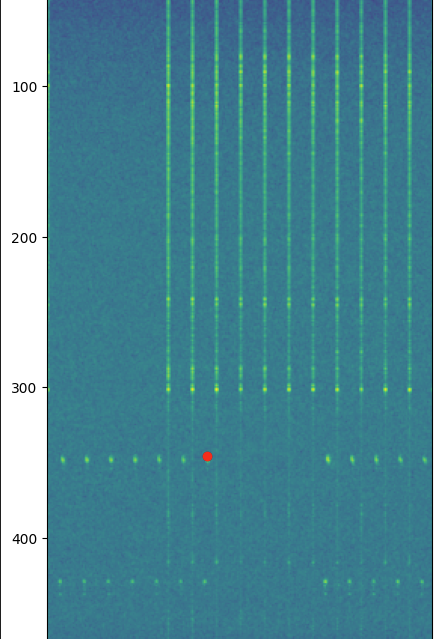
读取FFT频谱的结果如下:
3 raw_sequences数据解析显示
原始数据显示使用SignalProcessing文件夹下的脚本,这里需要导入DBReader目标,否则会出现找不到对应函数库的问题。
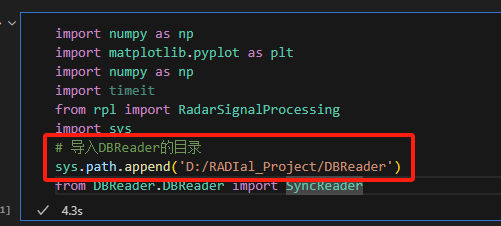
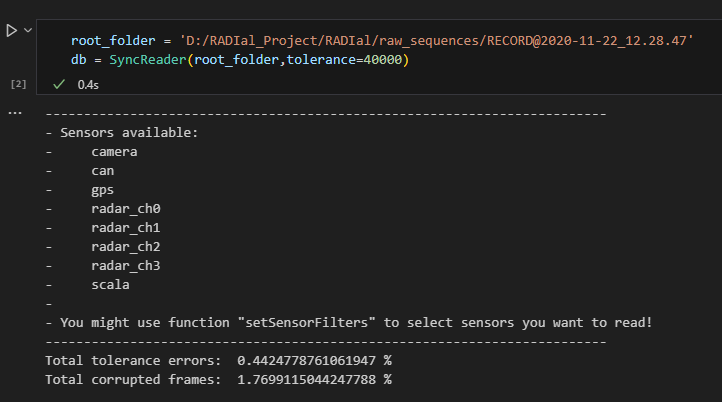
同样的,数据的根目录使用绝对路径:
从读取的数据中选择图片,显示如下:
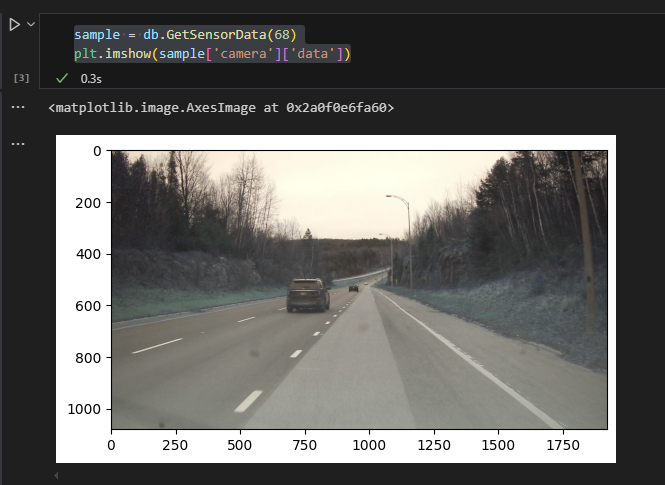
这里的图片显示比第2节的清晰,因为这里是原始数据。
第4段代码是调用校准参数,这里仍然建议用绝对路径,第5段代码是调用信号处理算法获取点云,是核心处理代码,代码在rpl.py文件中。
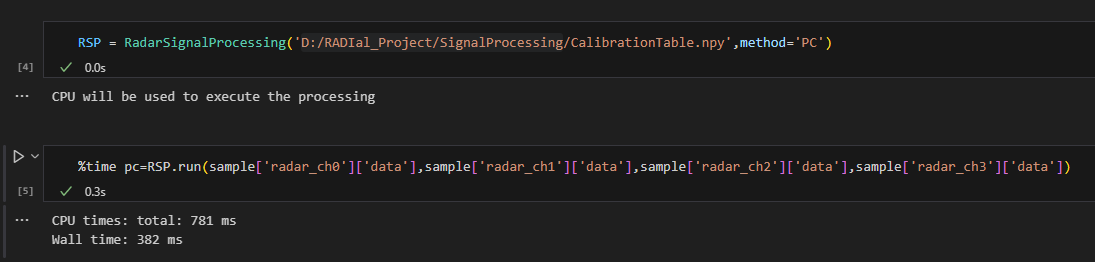
由于本机没有GPU,未安装cuda,所以将这块代码删除,使用CPU进行处理。同时不能成功调用mkl_fft,故换成了numpy的fft库,可以实现平替。


处理后的点云结果为:
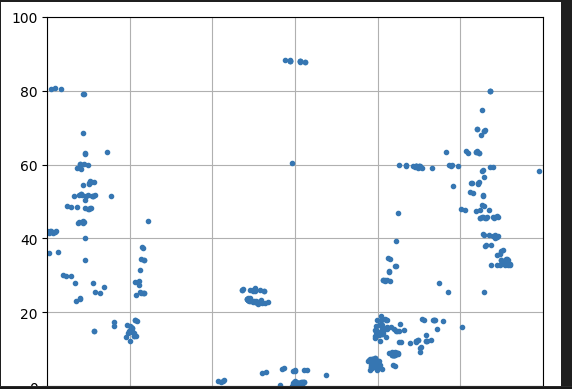
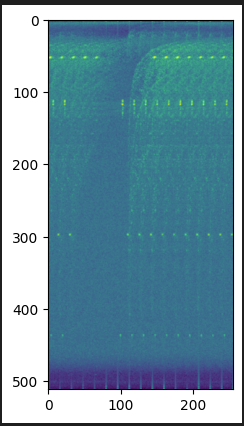
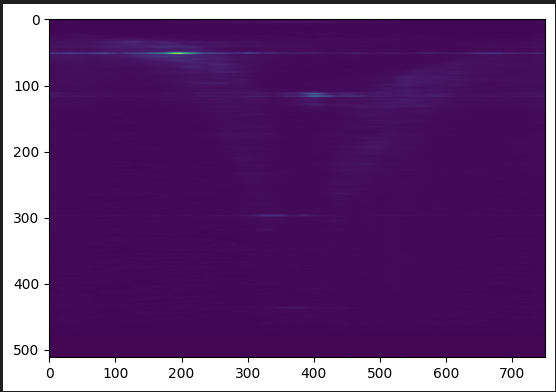
其中RV和RA图如下,RA图使用CPU计算时间较长。
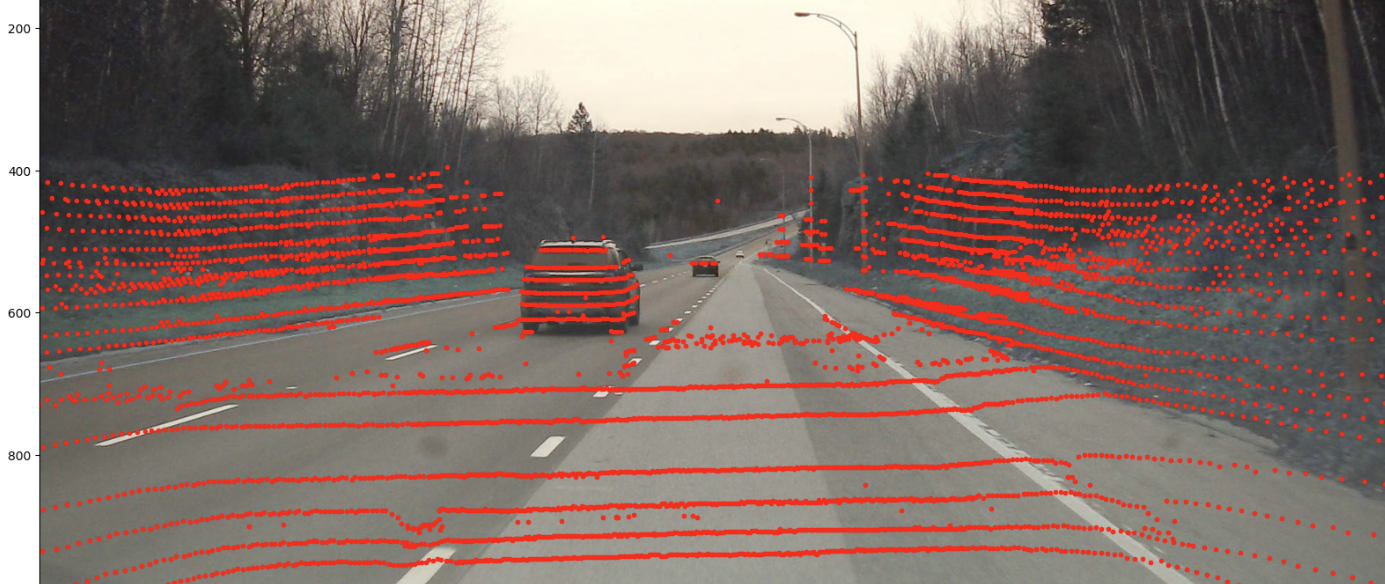
使用example_laser_projection.ipynb可以调用激光点云投影到图片上,用于验证结果。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











