






 该博客介绍了如何利用ResNet101网络进行迁移学习,特别是在猴子分类任务上的应用。首先,详细解释了ResNet网络结构,特别是Bottleneck模块,确保特征图的丰富性。接着,给出了ResNet101的实现代码,包括构建网络、定义Block、以及整个网络结构。然后,展示了训练过程,包括数据预处理、加载预训练权重、调整最后一层全连接层以适应10个类别,并使用Adam优化器进行训练。最后,提供了训练过程中的损失和准确率信息。
该博客介绍了如何利用ResNet101网络进行迁移学习,特别是在猴子分类任务上的应用。首先,详细解释了ResNet网络结构,特别是Bottleneck模块,确保特征图的丰富性。接着,给出了ResNet101的实现代码,包括构建网络、定义Block、以及整个网络结构。然后,展示了训练过程,包括数据预处理、加载预训练权重、调整最后一层全连接层以适应10个类别,并使用Adam优化器进行训练。最后,提供了训练过程中的损失和准确率信息。
resnet网络即为多个残差网络进行堆叠形成,主要是保证第n+1层网络的特征图所含特征比第n层多。
这里主要实现的是resnet101网络的迁移学习。
kaggle猴子分类的数据源:https://pan.baidu.com/s/1VVixGKyafn2qr9nC-oqSdA 提取码:lz1p
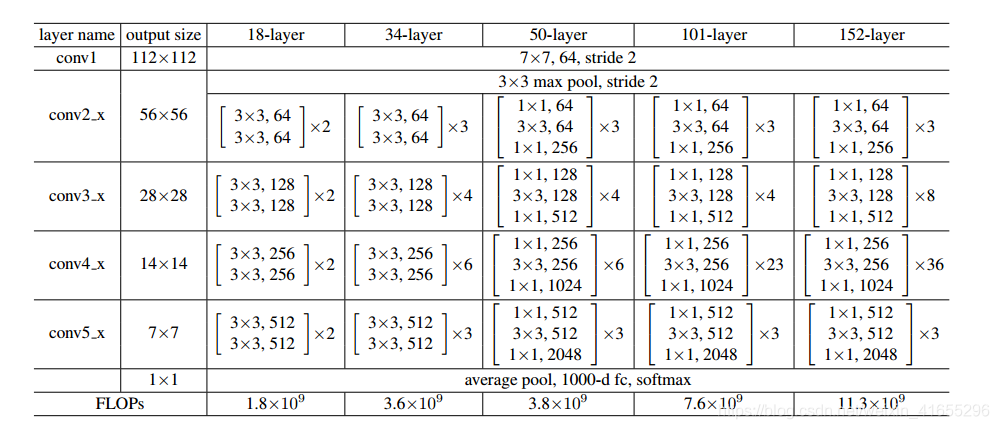
首先是构建resnet101网络
残差网络的构建
其中expansion=4是查看 输入的通道数 * 4 == 最后输出的通道数 是否成立,否则则进行1*1的卷积进行升维。
class Bottleneck(nn.Module):
expansion=4
def __init__(self,in_channel,out_channel,stride=1,downsample=None):
super(Bottleneck, self).__init__()
self.conv1=nn.Conv2d(in_channels=in_channel,out_channels=out_channel,
kernel_size=1,stride=1,bias=False)
self.bn1=nn.BatchNorm2d(out_channel)
#----
self.conv2=nn.Conv2d(in_channels=out_channel,out_channels=out_channel,
kernel_size=3,stride=stride,bias=False,padding=1)
self.bn2=nn.BatchNorm2d(out_channel)
#----
self.conv3=nn.Conv2d(in_channels=out_channel,out_channels=out_channel*self.expansion,
kernel_size=1,stride=1,bias=False)
self.bn3=nn.BatchNorm2d(out_channel*self.expansion)
self.relu=nn.ReLU(inplace=True)
self.downsample=downsample
def forward(self,x):
identity=x
if self.downsample is not None:
identity=self.downsample(x)
out=self.conv1(x)
out=self.bn1(out)
out=self.relu(out)
out=self.conv2(out)
out=self.bn2(out)
out=self.relu(out)
out=self.conv3(out)
out=self.bn3(out)
out+=identity
out=self.relu(out)
return outmodule.py文件
import torch
import torch.nn as nn
#定义resnet50、101的残差网络
class Bottleneck(nn.Module):
expansion=4
def __init__(self,in_channel,out_channel,stride=1,downsample=None):
super(Bottleneck, self).__init__()
self.conv1=nn.Conv2d(in_channels=in_channel,out_channels=out_channel,
kernel_size=1,stride=1,bias=False)
self.bn1=nn.BatchNorm2d(out_channel)
#----
self.conv2=nn.Conv2d(in_channels=out_channel,out_channels=out_channel,
kernel_size=3,stride=stride,bias=False,padding=1)
self.bn2=nn.BatchNorm2d(out_channel)
#----
self.conv3=nn.Conv2d(in_channels=out_channel,out_channels=out_channel*self.expansion,
kernel_size=1,stride=1,bias=False)
self.bn3=nn.BatchNorm2d(out_channel*self.expansion)
self.relu=nn.ReLU(inplace=True)
self.downsample=downsample
def forward(self,x):
identity=x
if self.downsample is not None:
identity=self.downsample(x)
out=self.conv1(x)
out=self.bn1(out)
out=self.relu(out)
out=self.conv2(out)
out=self.bn2(out)
out=self.relu(out)
out=self.conv3(out)
out=self.bn3(out)
out+=identity
out=self.relu(out)
return out
class resnet(nn.Module):
def __init__(self,block,blocks_num,num_classes=1000,include_top=True):
super(resnet,self).__init__()
self.include_top=include_top
self.in_channel=64
self.conv1=nn.Conv2d(3,self.in_channel,kernel_size=7,stride=2,padding=3,bias=False)
self.bn1=nn.BatchNorm2d(self.in_channel)
self.relu=nn.ReLU(inplace=True)
self.maxpool=nn.MaxPool2d(kernel_size=3,stride=2,padding=1)
self.layer1=self._make_layer(block,64,blocks_num[0])
#经过layer1后的in_channel=256
self.layer2=self._make_layer(block,128,blocks_num[1],stride=2)
self.layer3=self._make_layer(block,256,blocks_num[2],stride=2)
self.layer4=self._make_layer(block,512,blocks_num[3],stride=2)
if self.include_top:
self.avgpool = nn.AdaptiveAvgPool2d((1, 1)) # output size = (1, 1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
def _make_layer(self,block,channel,block_num,stride=1):
downsample=None
if stride!=1 or self.in_channel!=channel*block.expansion:
downsample=nn.Sequential(
nn.Conv2d(self.in_channel,channel*block.expansion,kernel_size=1,stride=stride,bias=False),
nn.BatchNorm2d(channel*block.expansion)
)
layers=[]
#加入基础网络
layers.append(block(self.in_channel,channel,downsample=downsample,stride=stride))
self.in_channel=channel*block.expansion
#每个基础网络的个数
for _ in range(1,block_num):
layers.append(block(self.in_channel,channel))
return nn.Sequential(*layers)
def forward(self,x):
x=self.conv1(x)
x=self.bn1(x)
x=self.relu(x)
x=self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
if self.include_top:
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
def resnet101(num_classes=1000, include_top=True):
return resnet(Bottleneck, [3, 4, 23, 3], num_classes=num_classes, include_top=include_top)
if __name__ == '__main__':
print(resnet101())
train.py文件
resnet模型参数下载:https://download.pytorch.org/models/resnet101-5d3b4d8f.pth
import os
import json
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import transforms, datasets
from tqdm import tqdm
from model import resnet34
from model import resnet101
def main():
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print("using {} device.".format(device))
data_transform = {
"train": transforms.Compose([transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])]),
"val": transforms.Compose([transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])])}
train_dataset = datasets.ImageFolder(root=os.path.join(image_path, "training"),
transform=data_transform["train"])
train_num = len(train_dataset)
batch_size = 4
nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8]) # number of workers
print('Using {} dataloader workers every process'.format(nw))
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size, shuffle=True,
num_workers=nw)
validate_dataset = datasets.ImageFolder(root=os.path.join(image_path, "validation"),
transform=data_transform["val"])
val_num = len(validate_dataset)
validate_loader = torch.utils.data.DataLoader(validate_dataset,
batch_size=batch_size, shuffle=False,
num_workers=nw)
print("using {} images for training, {} images for validation.".format(train_num,
val_num))
net=resnet101()
# load pretrain weights
model_weight_path = "./model_p/resnet101-5d3b4d8f.pth"
assert os.path.exists(model_weight_path), "file {} does not exist.".format(model_weight_path)
net.load_state_dict(torch.load(model_weight_path, map_location=device))
# change fc layer structure
in_channel = net.fc.in_features
net.fc = nn.Linear(in_channel, 10)
net.to(device)
# define loss function
loss_function = nn.CrossEntropyLoss()
# construct an optimizer
params = [p for p in net.parameters() if p.requires_grad]
optimizer = optim.Adam(params, lr=0.0001)
epochs = 3
best_acc = 0.0
save_path = './model_p/monkey_ResNet101.pth'
train_steps = len(train_loader)
for epoch in range(epochs):
# train
net.train()
running_loss = 0.0
train_bar = tqdm(train_loader)
for step, data in enumerate(train_bar):
images, labels = data
optimizer.zero_grad()
logits = net(images.to(device))
loss = loss_function(logits, labels.to(device))
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
train_bar.desc = "train epoch[{}/{}] loss:{:.3f}".format(epoch + 1,
epochs,
loss)
# validate
net.eval()
acc = 0.0 # accumulate accurate number / epoch
with torch.no_grad():
val_bar = tqdm(validate_loader)
for val_data in val_bar:
val_images, val_labels = val_data
outputs = net(val_images.to(device))
# loss = loss_function(outputs, test_labels)
predict_y = torch.max(outputs, dim=1)[1]
acc += torch.eq(predict_y, val_labels.to(device)).sum().item()
val_bar.desc = "valid epoch[{}/{}]".format(epoch + 1,
epochs)
val_accurate = acc / val_num
print('[epoch %d] train_loss: %.3f val_accuracy: %.3f' %
(epoch + 1, running_loss / train_steps, val_accurate))
if val_accurate > best_acc:
best_acc = val_accurate
torch.save(net.state_dict(), save_path)
print('Finished Training')
if __name__ == '__main__':
main()


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









