









 本文深入探讨KCF跟踪算法的关键概念,包括循环矩阵逆的计算及其在目标跟踪中的应用。通过调整padding大小,改进了对快速移动目标的检测能力,但同时也指出了对于相似目标可能出现的漂移问题。此外,还介绍了与KCF相关的图像特征提取方法,如HOG、LBP及Haar-like特征。
本文深入探讨KCF跟踪算法的关键概念,包括循环矩阵逆的计算及其在目标跟踪中的应用。通过调整padding大小,改进了对快速移动目标的检测能力,但同时也指出了对于相似目标可能出现的漂移问题。此外,还介绍了与KCF相关的图像特征提取方法,如HOG、LBP及Haar-like特征。
开始hog之旅
KCF最重要的一点: 循环矩阵的逆,等价于将其特征值求逆。
X
−
1
=
F
⋅
d
i
a
g
(
x
^
)
−
1
F
H
=
C
(
F
−
1
(
d
i
a
g
(
x
^
)
−
1
)
)
X^{-1}=F\cdot diag(\hat{x})^{-1}F^H=C\left( \mathcal F^{-1}(diag(\hat{x})^{-1}) \right)
X−1=F⋅diag(x^)−1FH=C(F−1(diag(x^)−1))
加大了padding,移动快的目标容易检测出来啊,但是相似目标确实容易漂移,我试了blurbody和basketball。padding加大后,前者效果好了,后者效果查了
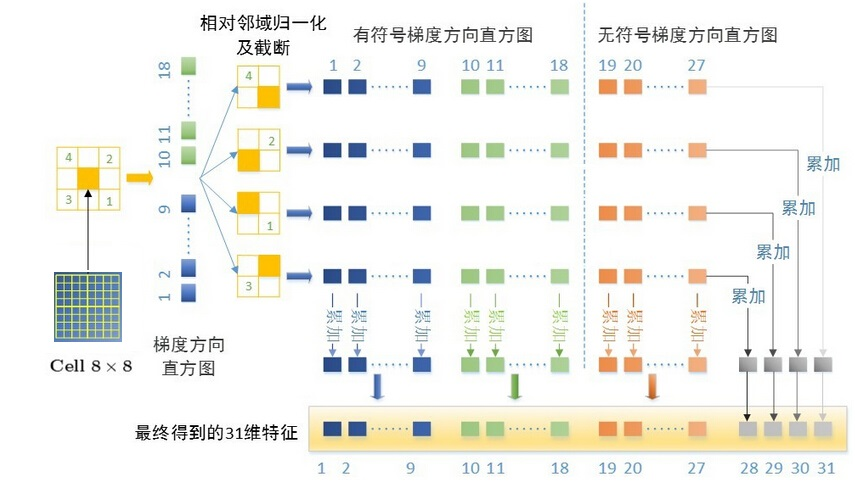
1.HOG特征
2.图像特征提取三大法宝:HOG特征、LBP特征、Haar-like特征
3.HOG ,SIFT 特征实现
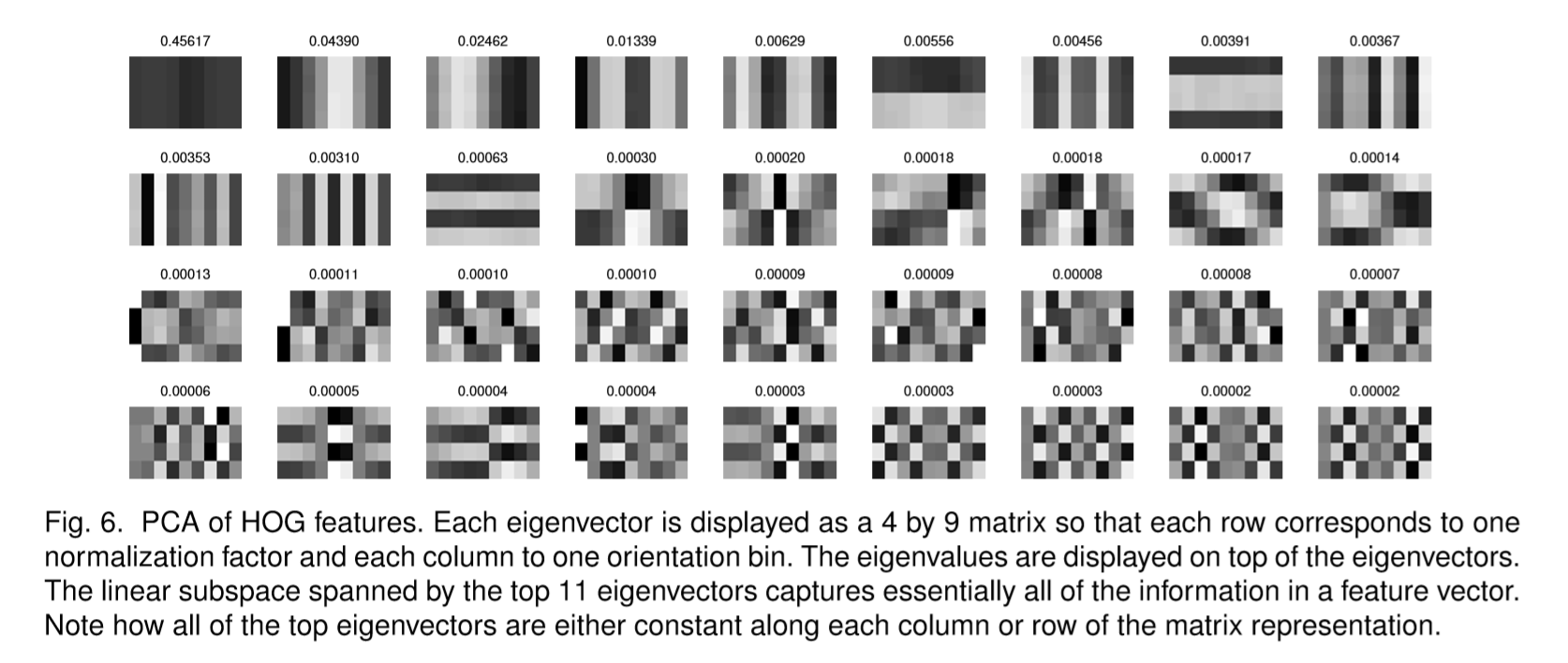
4.FHOG
5.DPM(Deformable Part Model)原理详解
5.1DPM目标检测算法
6.三线性插值-hog
7.HOG特征中的三线插值法
8.行人检测之HOG——方向梯度直方图(Histogram of Oriented Gradient)
9.目标跟踪:KCF
10.【目标跟踪】KCF高速跟踪详解
11.边界效应与VOT2015
说明ECO_HC是手工特征,即经典的HOG CN GRAY等等
ECO_DEEP就是深度学习获得的特征

















 3910
3910

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









