






 本文介绍了目标跟踪的重要性和挑战,提出了利用行人重识别和人体关键点检测来构建状态感知的轨迹外观特征,从而提高跟踪性能。在单摄像头下,通过检测、重识别和关键点检测获取目标轨迹;在多摄像头场景中,采用层次聚类对轨迹进行聚类,实现跨摄像头跟踪。实验结果显示,该方法在多目标跟踪基准数据集上表现出色。
本文介绍了目标跟踪的重要性和挑战,提出了利用行人重识别和人体关键点检测来构建状态感知的轨迹外观特征,从而提高跟踪性能。在单摄像头下,通过检测、重识别和关键点检测获取目标轨迹;在多摄像头场景中,采用层次聚类对轨迹进行聚类,实现跨摄像头跟踪。实验结果显示,该方法在多目标跟踪基准数据集上表现出色。
目标跟踪是被视觉领域中被广为探究的重要方向之一,它可以分为单目标跟踪与多目标跟踪。
在跟踪场景中经常存在目标之间的互相遮挡、背景干扰等问题,导致检测性能下降以及目标的外观特征不稳定进而影响跟踪性能。现有的跟踪方法通常采用行人重识别技术(Re-ID)提取目标的外观特征,然而目标的外观在不同朝向下具有较大的差异,直接使用行人重识别网络提取人体的外观特征而忽略人体朝向、遮挡的因素不能充分地利用行人重识别网络提取的外观特征。同时,现有的算法往往采用复杂的图模型对整个序列进行建模,求解所耗时间以及内存较大。

No.1 如何获得目标在单摄像头下的轨迹?
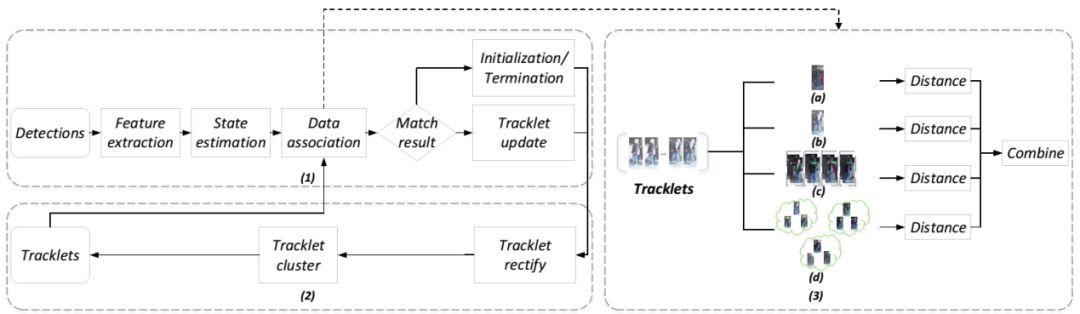
我们的算法在单摄像头下,通过检测器检测图像序列中存在的目标,通过行人重识别网络提取相应区域的外观特征,通过人体关键点检测网络提取相应区域的人体关键点。利用人体关键点推测目标的朝向与遮挡状态。基于朝向与遮挡状态设计一种状态可感知的轨迹外观特征,然后利用状态可感知的轨迹外观特征构建轨迹与检测的距离矩阵,然后基于距离矩阵得到轨迹与检测框的匹配结果。对于匹配上的轨迹更新特征以及状态。基于未匹配上的检测框产生新的轨迹片段。使用轨迹召回以及轨迹聚合技术融合断裂的轨迹片段,通过上述方式可以获得目标在单摄像头下的轨迹,整体框架如下图所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1134
1134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









