




 本文介绍了ROS与AI在机器人领域的结合,以Unity机器人仿真实例为背景,探讨了Intel和NVidia硬件在机器人智能方案中的作用。文章提到了Artificial Human Companions的Deep Learning Robot,以及赛灵思在FPGA和AI融合方面的努力,还讨论了LG的LGSVL Simulator与ROS2的兼容性,以及Intel的OpenVINO Toolkit在计算机视觉和机器人智能中的应用。
本文介绍了ROS与AI在机器人领域的结合,以Unity机器人仿真实例为背景,探讨了Intel和NVidia硬件在机器人智能方案中的作用。文章提到了Artificial Human Companions的Deep Learning Robot,以及赛灵思在FPGA和AI融合方面的努力,还讨论了LG的LGSVL Simulator与ROS2的兼容性,以及Intel的OpenVINO Toolkit在计算机视觉和机器人智能中的应用。
现在人工智能的方案很多,也并应用到很多的领域去了,我这里并不对这些方面展开。我只对在机器人领域,特别是ROS以及ROS2系统上融合的一些人工智能方案跟平台做一定程度的归纳、总结。其次,即使在机器人应用方面,在此之前的几年时间里,很多知名的、大型的公司都曾推出过或者评估过人工智能的渗透方案,他们的评估方案不一而足,有的是乐观的,有些是悲观的,有的到现在还在不遗余力地在拓展,有的已经偃旗息鼓了,由于他们或者与ROS不相关,或者并不是开源,都不在我的探究范围。同时,国内兴起了一批的现代机器人公司,也有一批专门的AI方面的研发、应用公司,他们大多不热衷于开源,也不在探究之内。是为“小探”的小字之解。
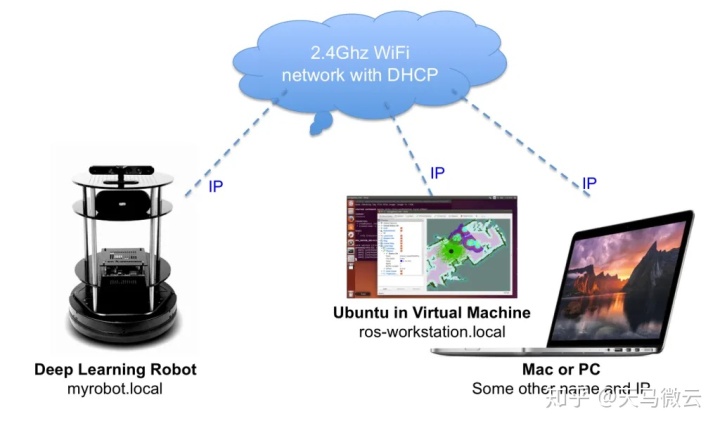
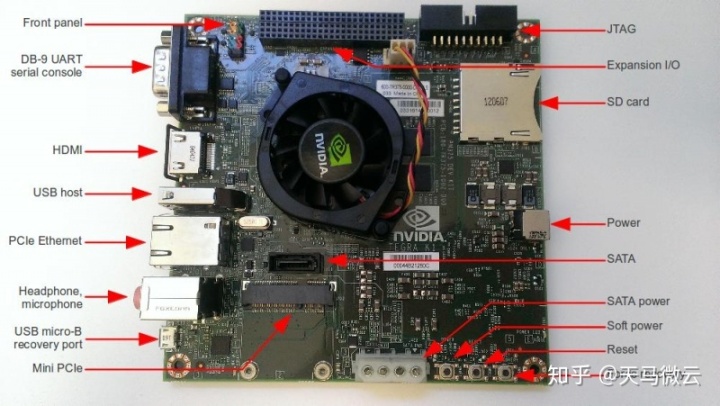
在网上能找到ROS跟AI结合的资料是2016年,基于Intel CPU+NVidia Jetson板子。这是一个叫Artificial Human Companions的小公司将turtlebot机器人底盘跟这样的两个板子组合起来的一种非常简易的AI方案,叫做Deep Learning Robot,售价不到400美元。
但是它所涉及的领域,到现在还是在大谈特谈。
这个机器人使用了Turtlebot2的移动能力以及ROS的分布式部署。
使用了Intel架构的主板作为运行ROS主要模块的大脑版以及NVidia Jetson板子提供的深度学习计算能力。
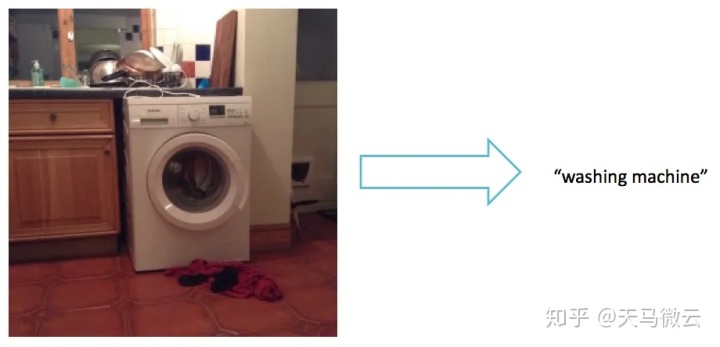
提供简易的基于物体识别和语音辨识的语义级地图,在理解环境跟完成指令等方面,增加了些许智能化的“人性”倾向,譬如人类可以通过语音控制机器人跑到指定的物体面前,而不是用冷冰冰的二维坐标。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 150
150

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









