






宇树科技激光雷达L1拆解和原理分析
以下文章来源于雪岭飞花 ,作者雪岭飞花
研究自动驾驶行业最新趋势,做有深度、高质量的技术分享,推动自动驾驶技术的普及和发展。

宇树科技是大家非常熟悉的著名机器人公司,开发了很多优秀的四足和双足机器人产品。
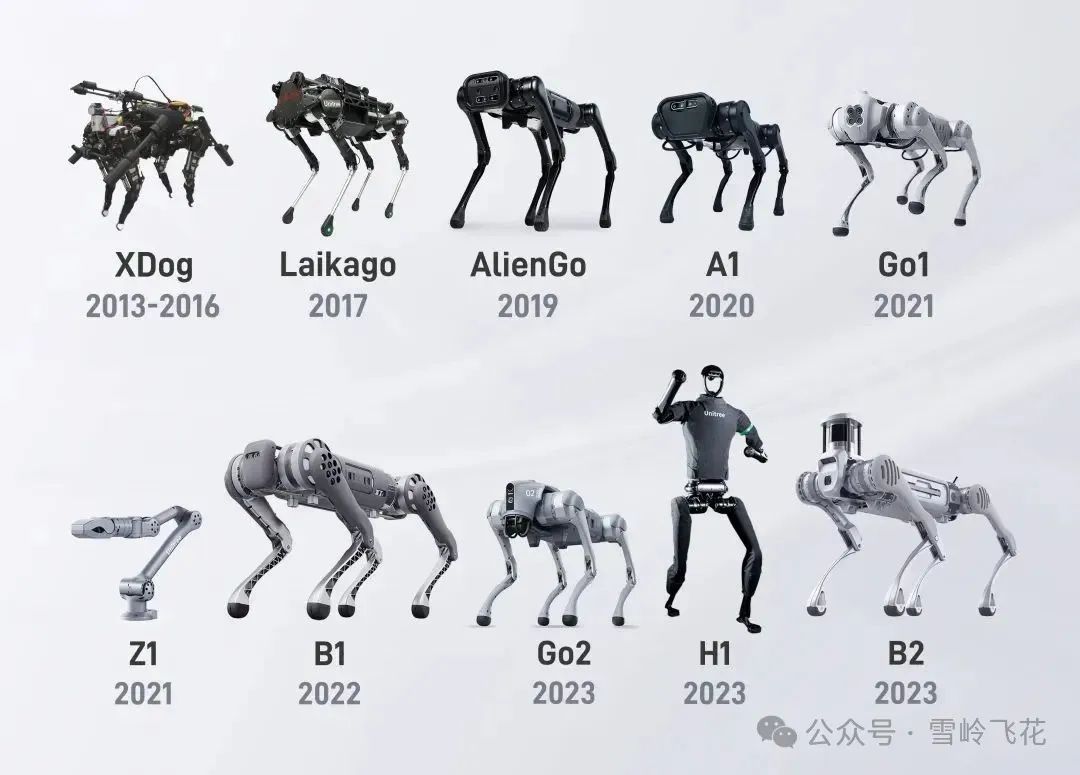
图片来源:宇树科技
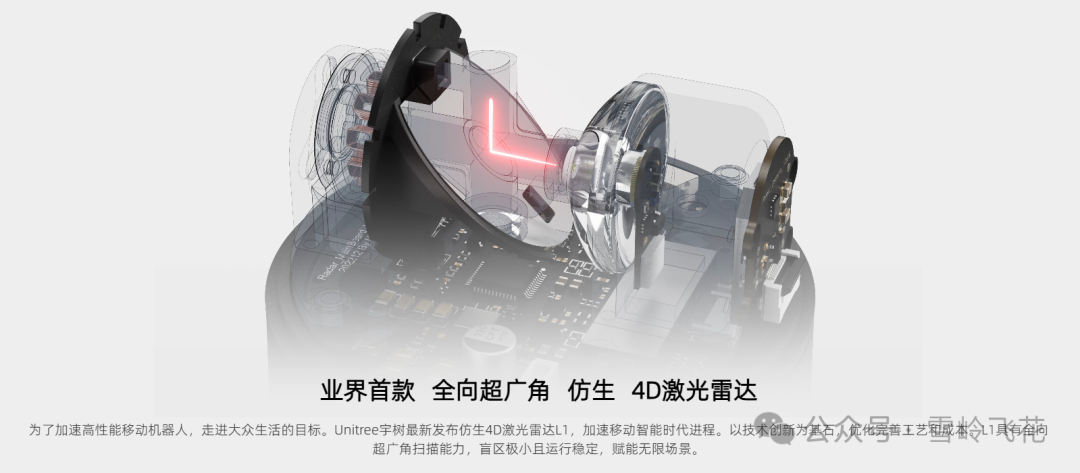
除了机器人整机,宇树科技还自研了激光雷达产品:Unitree 4D Lidar L1和L2。

图片来源:宇树科技
L1和L2在工作原理上类似,本文以L1为例,通过硬件拆解,对其工作原理做一下浅析。
图片来源:宇树科技
01
基本参数和应用
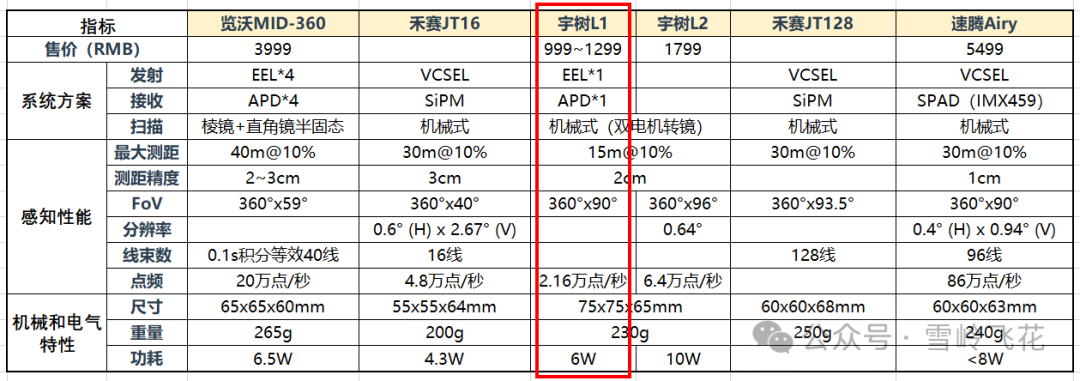
宇树科技激光雷达L1是2023年3月上市,L2是L1的升级版,在2024年11月上市。
两者性能对比如下:
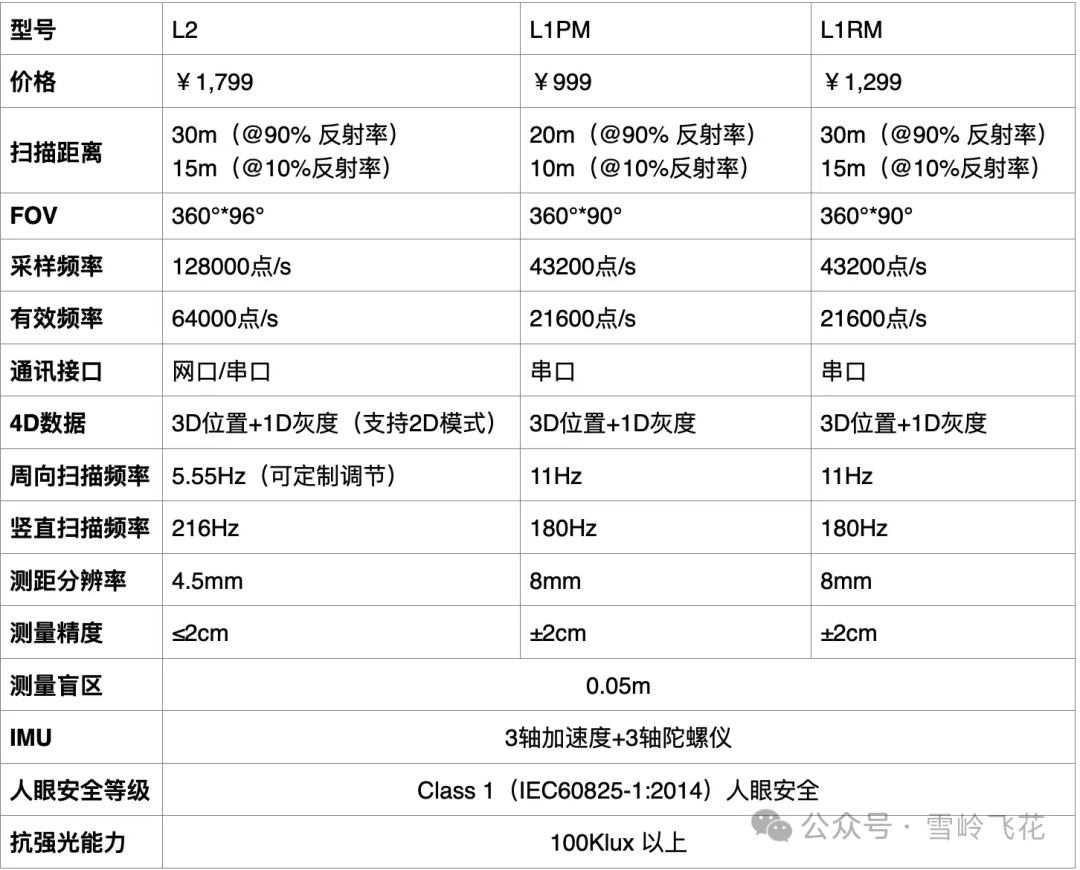
图片来源:宇树科技
L1的检测效果如下:
,时长00:19
素材来源:宇树科技
L2的检测效果如下:
,时长00:10
素材来源:宇树科技
L1和L2主要用在宇树的机器狗产品上。

素材来源:宇树科技
搭载L1的宇树机器狗:
,时长00:12
素材来源:宇树科技
L1在机器狗上的感知功能:
,时长00:09
素材来源:宇树科技
02
整体结构
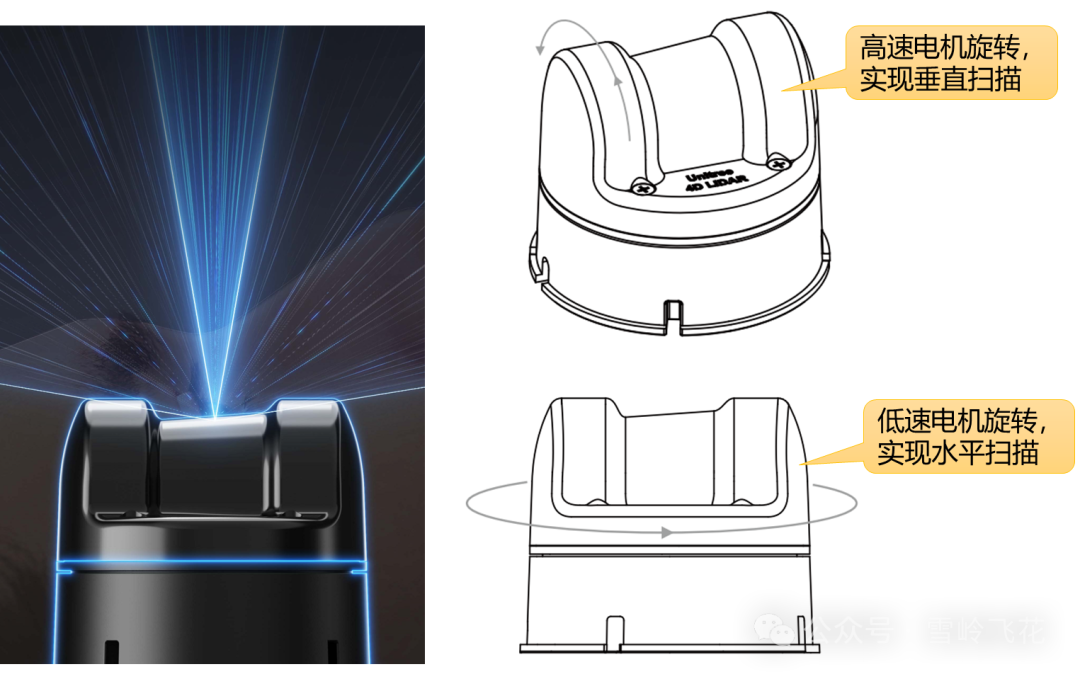
L1激光雷达采用机械式扫描方案,由高速和低速两个电机,带动扫描组件旋转,实现垂直和水平两个方向的扫描。
两个电机的旋转方向如下图所示。
1. FOV
L1可实现水平360°和垂直90°的FOV,如下图所示。
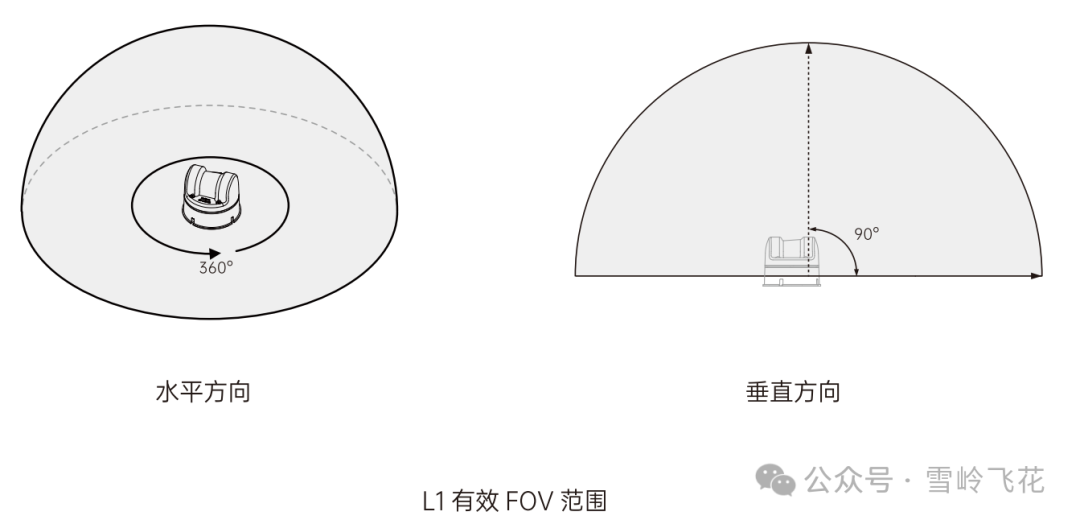
素材来源:宇树科技
L1的点云密度在不同的FOV区域有所区别,越靠近中心,点云密度越大:
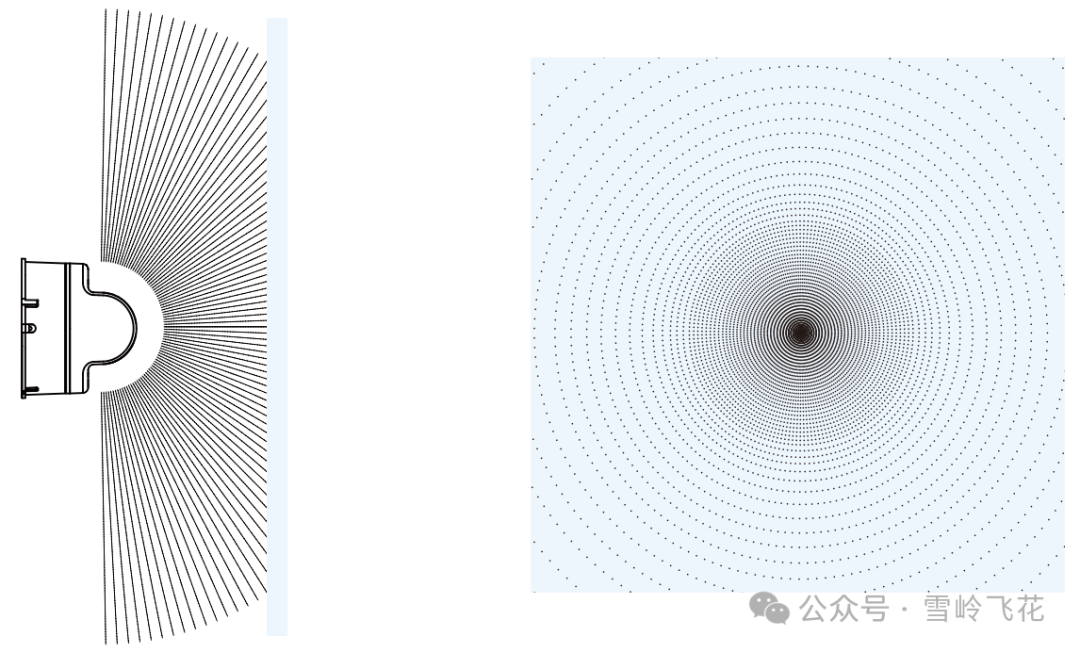
素材来源:宇树科技
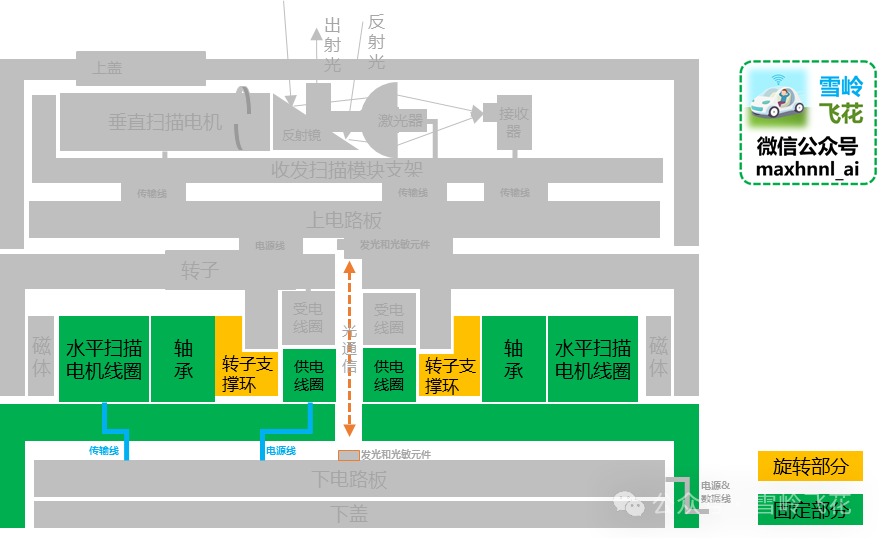
2. 整体结构
L1的整体结构由固定和旋转两部分组成,内部结构的剖面示意图如下。
其中,下面绿色元件为固定部分,上面黄色元件为旋转部分。(注:里面组件名称为笔者自定,未必是准确称谓,仅用于方便说明组件功能)
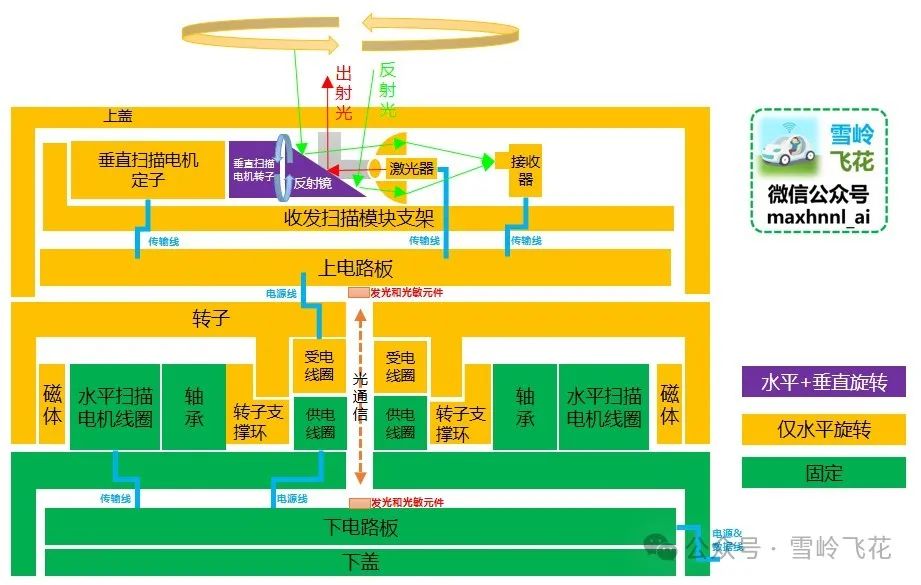
其中,上下两块电路板通过电磁感应传输电能,通过光通信传输数据。
拆解之后的主要元件:

03
控制电路板和水平旋转
1. 下电路板
下电路板的元件如下。
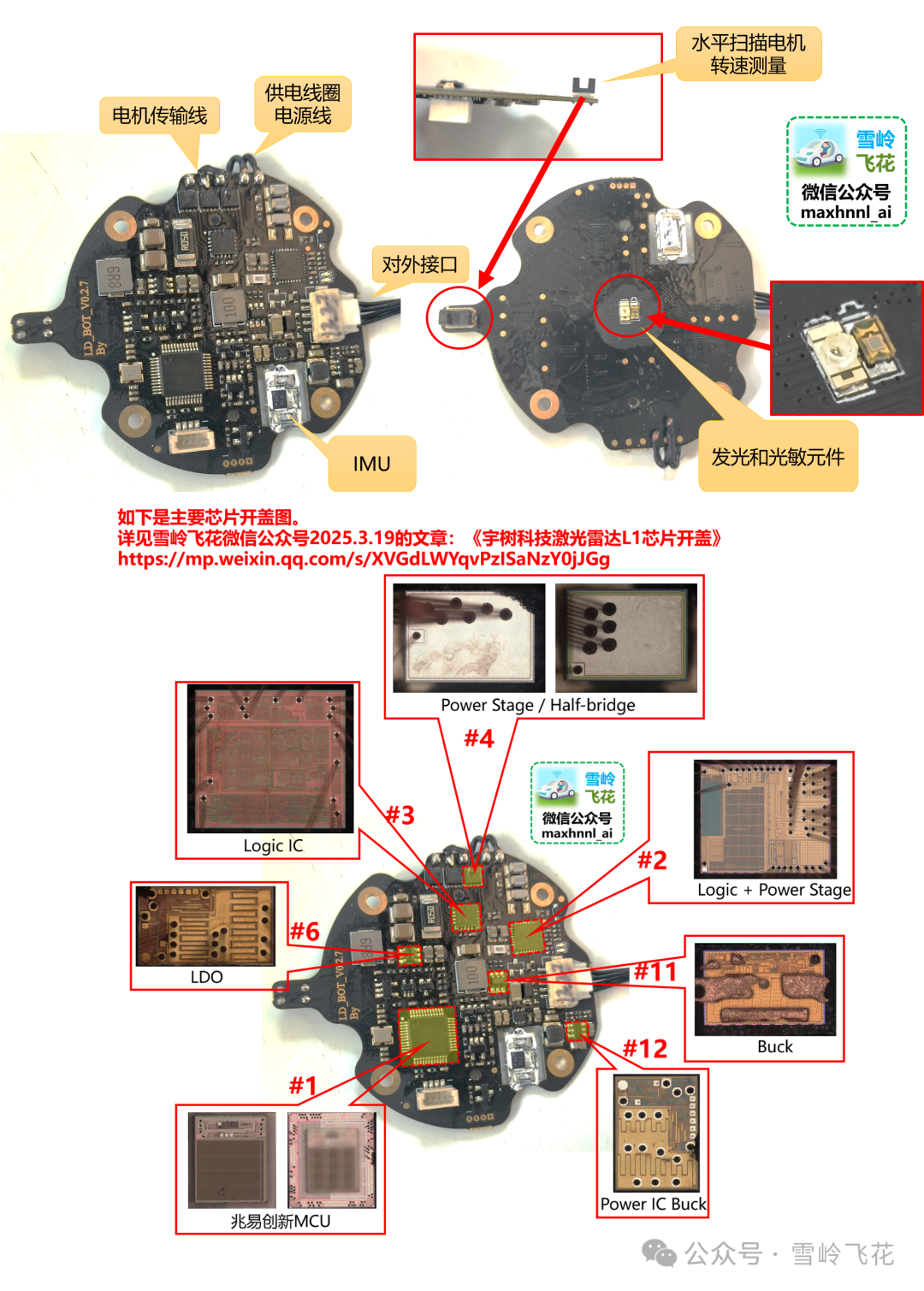
由于芯片看不到丝印,因此很难判断芯片主要功能。根据器件外观,推测主要用于水平扫描电机的控制、IMU信号处理、整机控制和外部信号通信。
2. 水平电机+轴承等总成
该总成主要包括定子线圈、轴承、转子支撑环、供电线圈等,这部分组件在整个雷达中的位置如下:
实物照片如下:

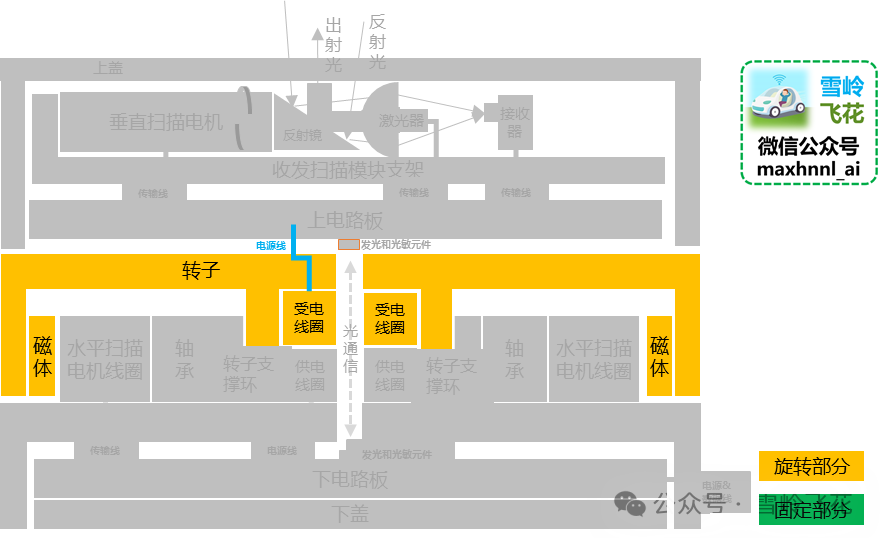
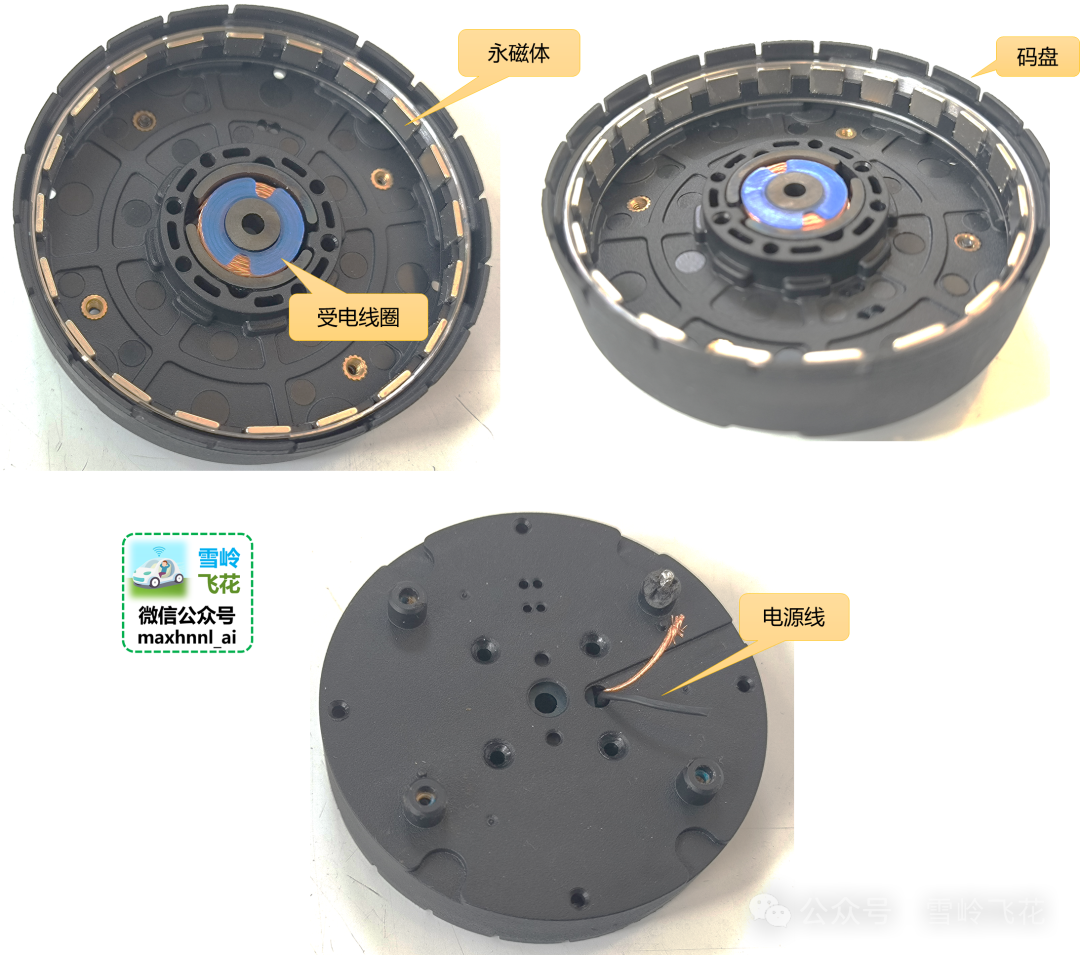
3. 转子+受电线圈等总成
该总成主要包括转子、受电线圈等,这部分组件在整个雷达中的位置如下:
实物照片如下:
4. 上电路板
上电路板的主要元件如下。
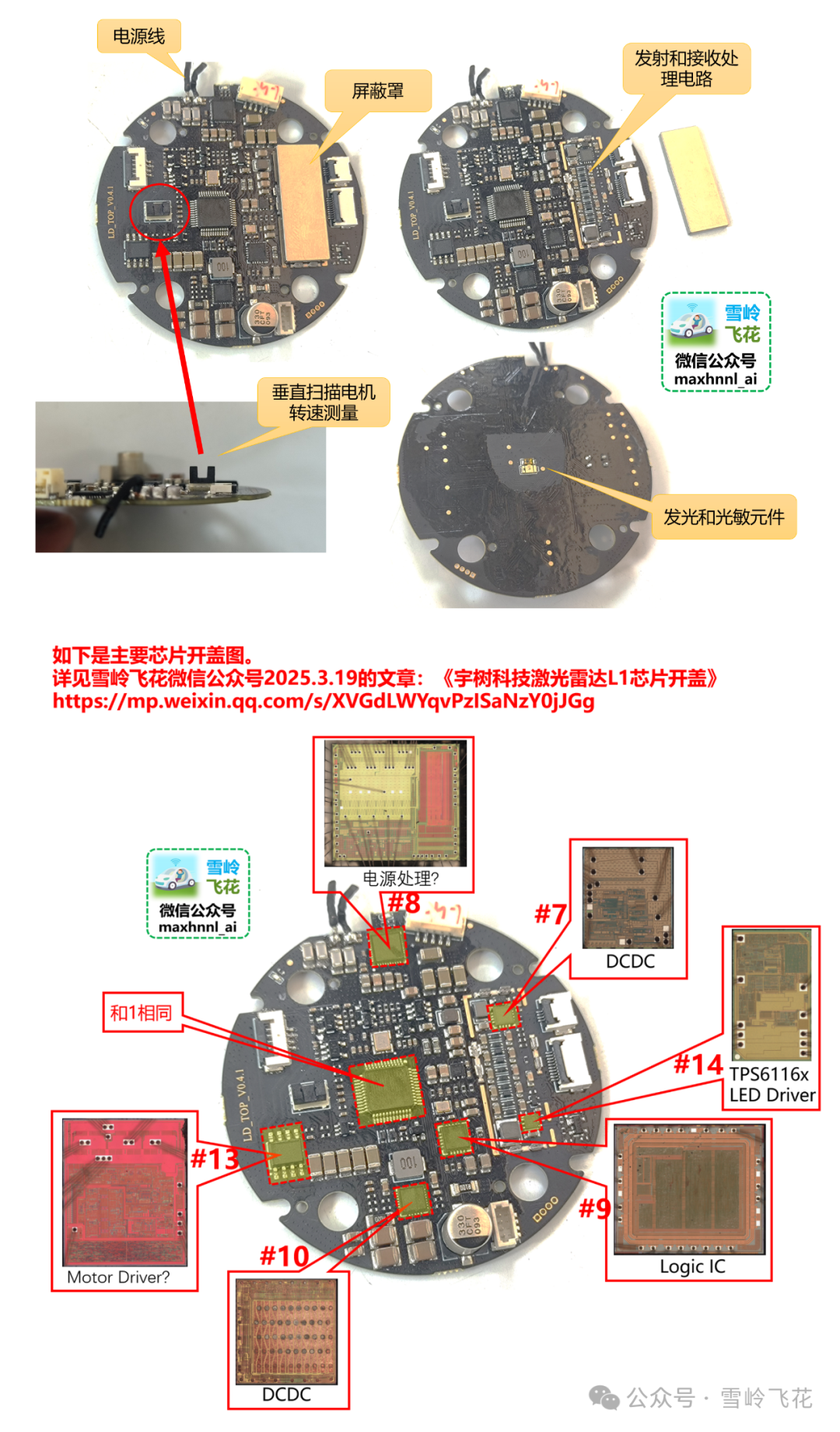
上电路板的芯片也看不到丝印,根据器件外观,推测主要用于垂直扫描电机的控制、激光器控制和激光接收信号处理等。
04
收发模组
1. 收发扫描模块
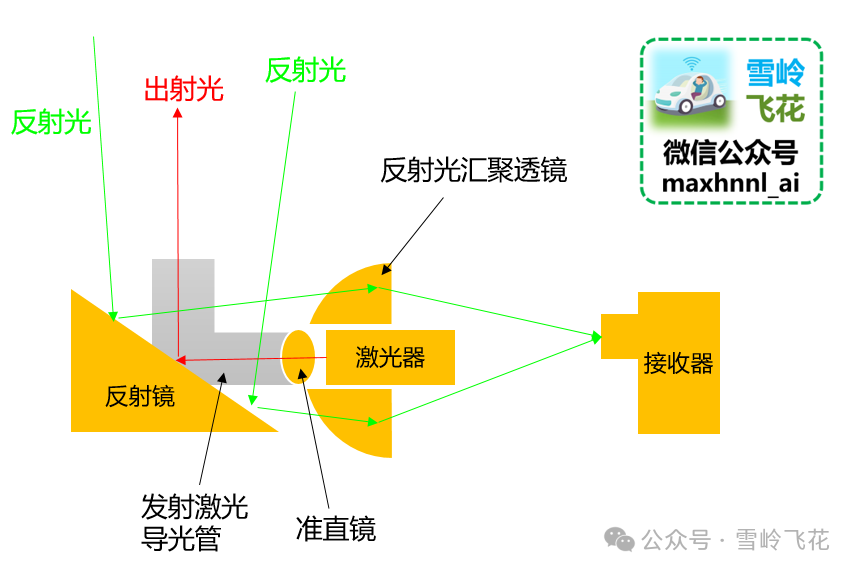
L1的收发原理图如下:
宇树官网的激光雷达原理示意:
,时长00:03
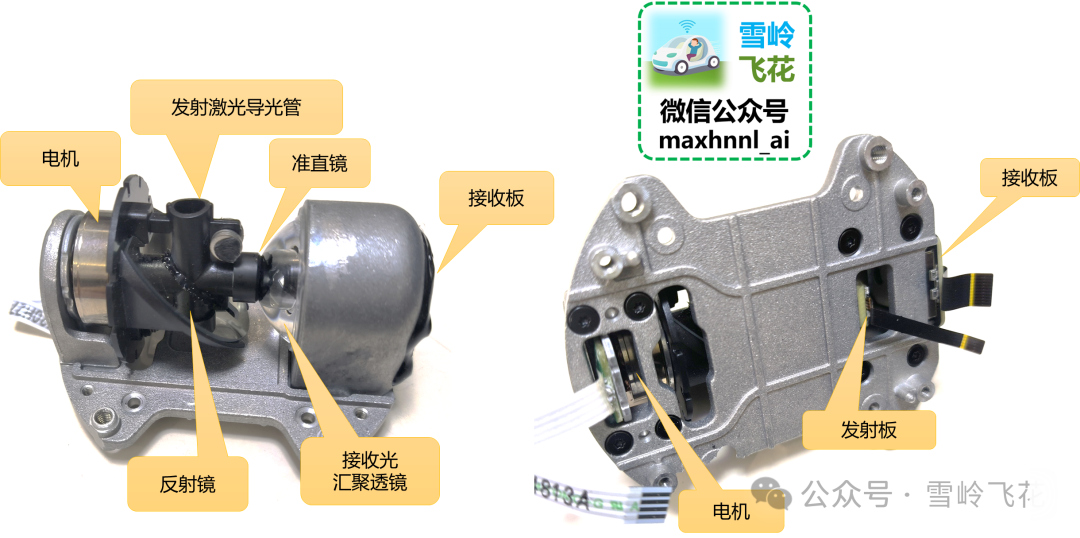
收发扫描模块总成:
2. 发射单元
激光器安装在接收聚光透镜的中间:
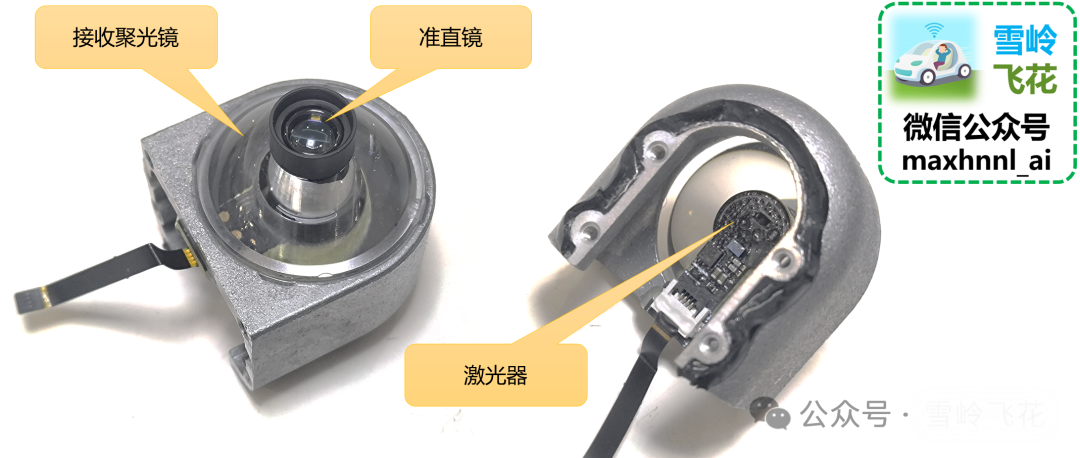
将激光器电路板拆下来之后,如下:

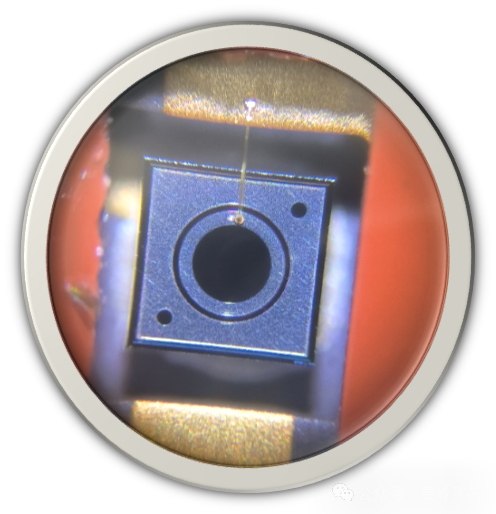
将激光器取下,可以看到是一颗TO封装的EEL激光器:
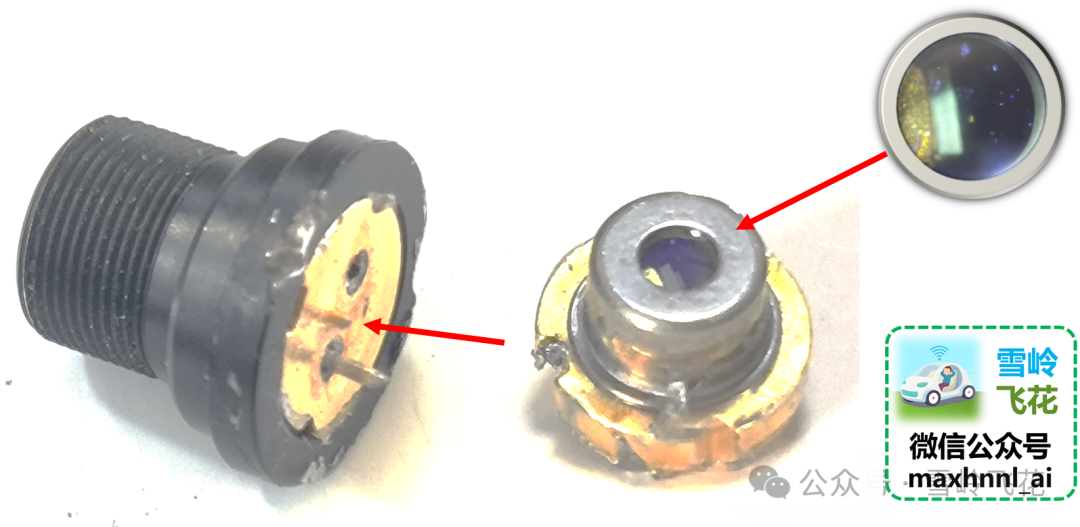
TO(Transisitor Outline,晶体管外形)是一种晶体管封装,将相关器件被成型加工,方便用于表面贴装。TO封装的原理如下:
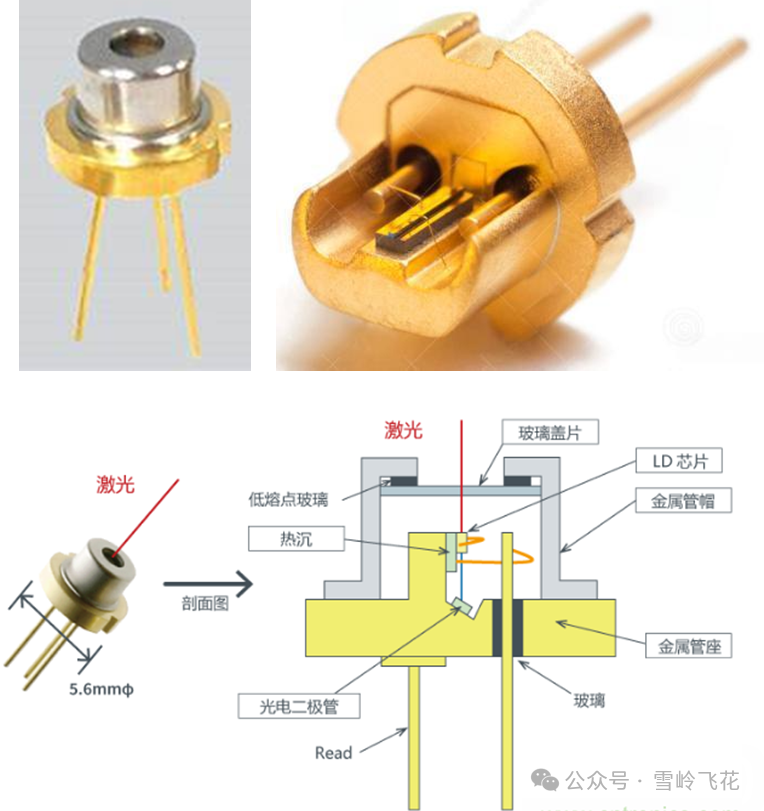
图片来源:网络
准直镜和上面激光器通过螺丝连接:
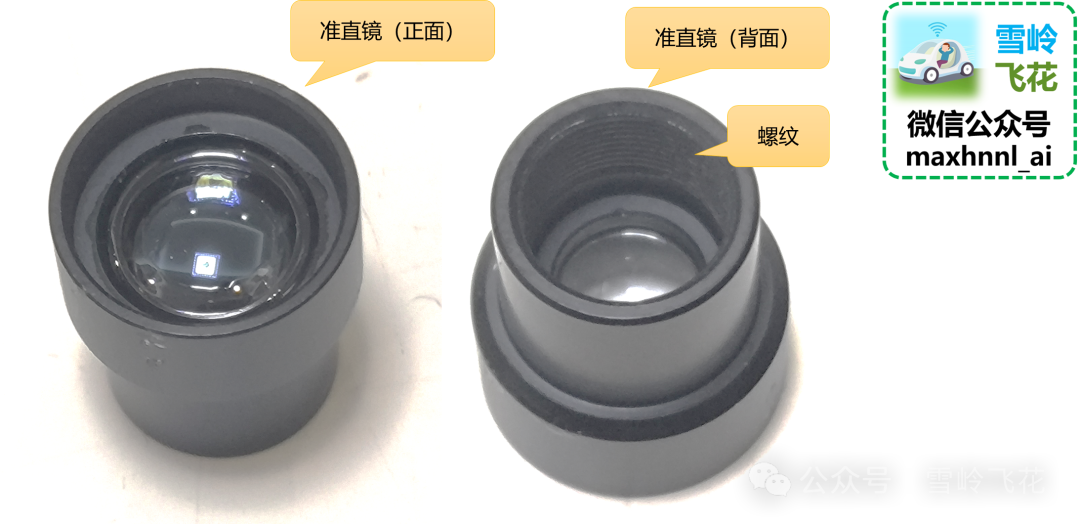
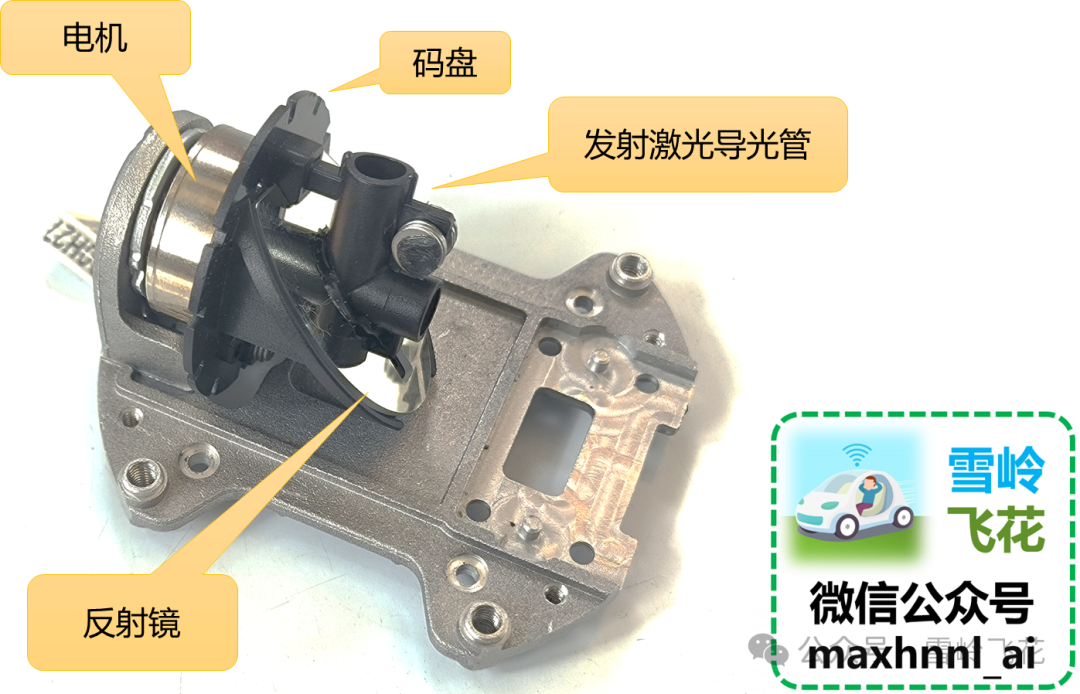
发射的激光通过准直镜后,再经过导光管和反射镜,最终发射出去。
3. 接收单元
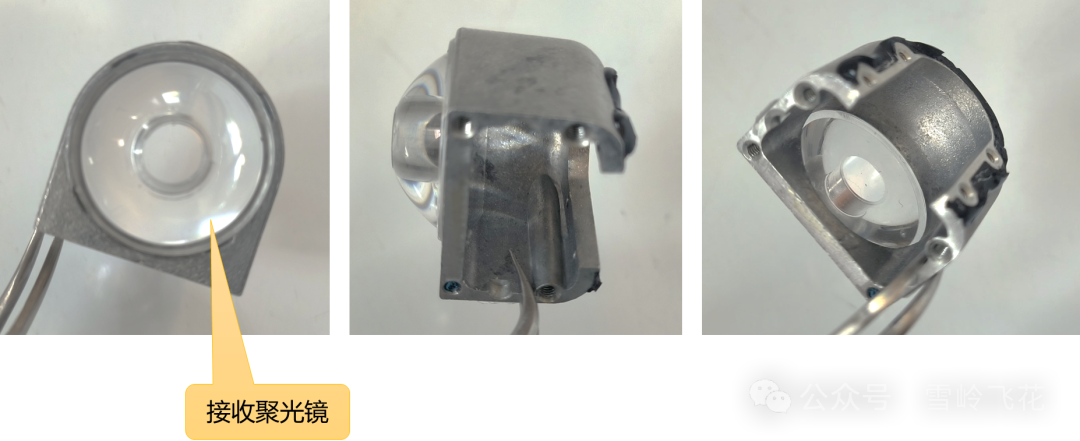
反射的激光经过反射镜反射之后,通过汇聚透镜,聚焦在接收单元上。
汇聚透镜及其支架如下:
接收单元电路板如下,其中核心是一颗APD:
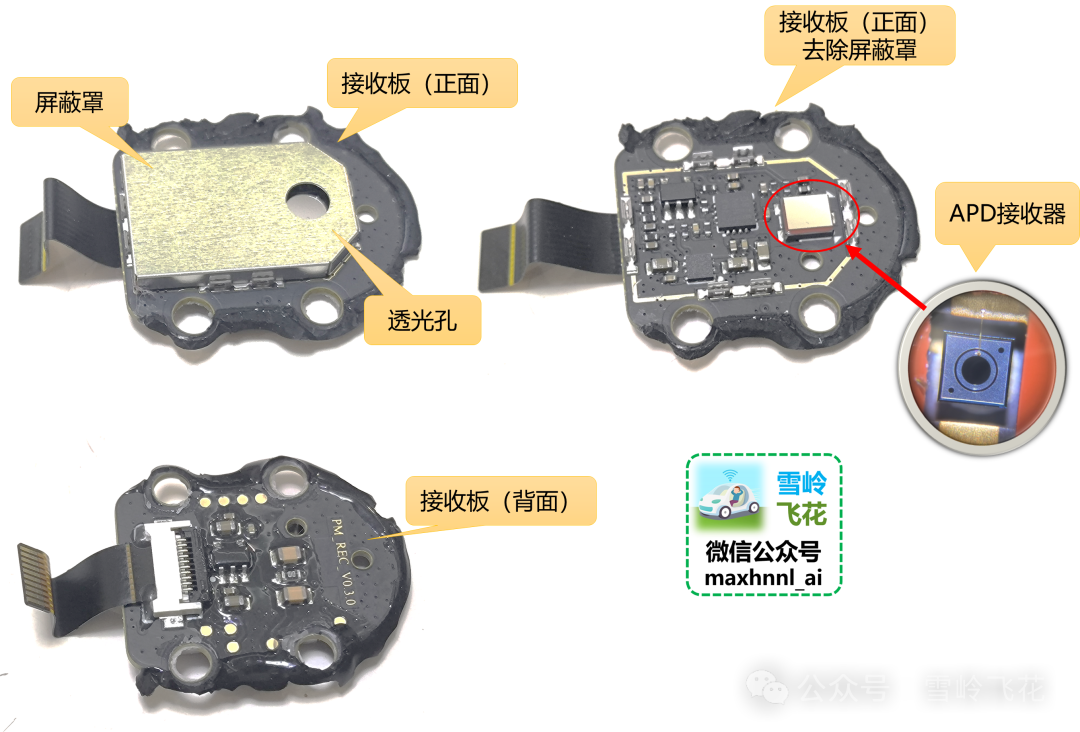
这是其中放大40倍的APD(去掉滤光片):
4. 垂直扫描机构
在L1中,由一个高速电机带动反射镜和导光管一同旋转,实现垂直方向的扫描。
05
特点浅析
1. 数据传输方案
L1的上下两块电路板有相对旋转运动,它们之间采用光通信技术进行非接触式数据交换。
在光通信系统中,发送端通过发光二极管,将电信号转换为光信号后发射,接收端通过光敏二极管接收光信号,并将其转换为电信号。基本结构如下:
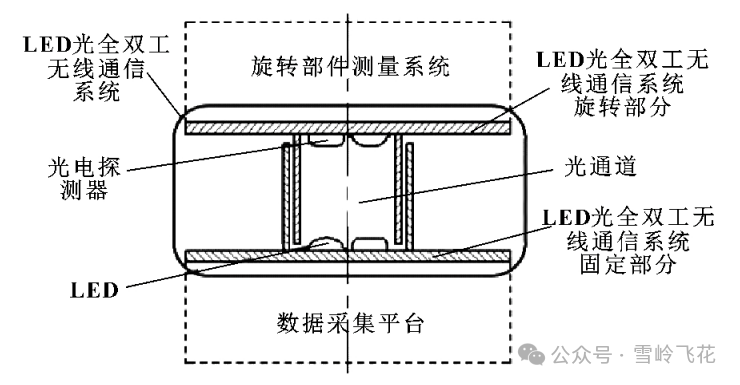
图片来源:韩刘帮等,《基于LED可见光全双工通信的旋转部件数据传输系统设计》
基本原理:
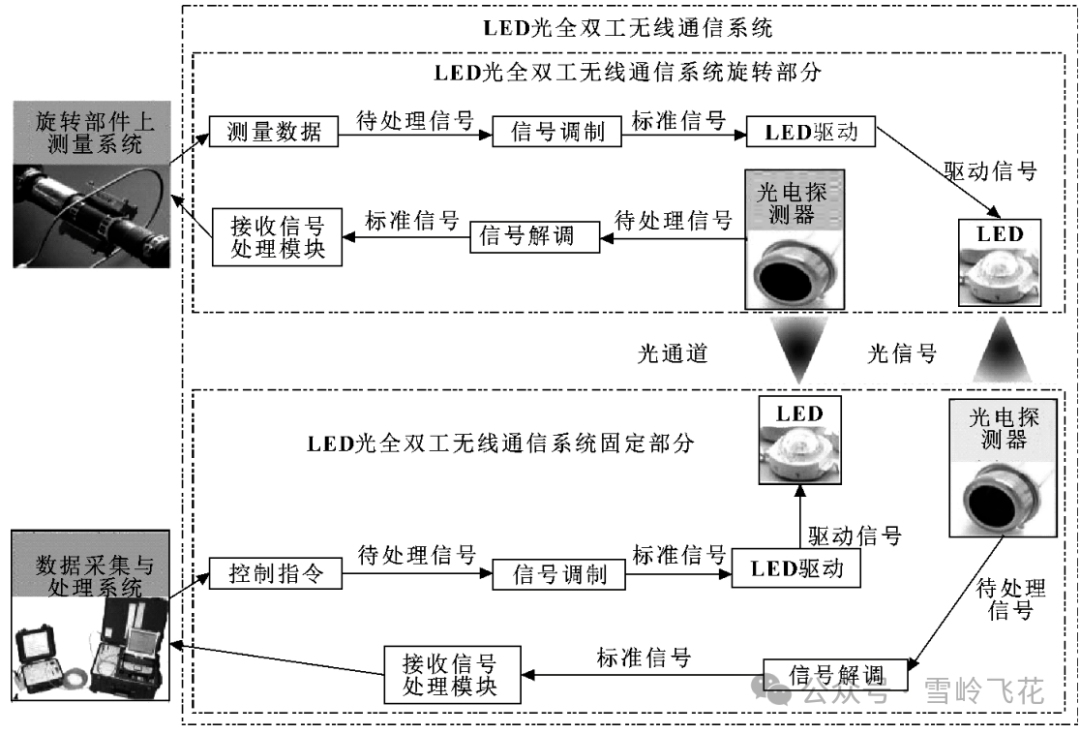
图片来源:韩刘帮等,《基于LED可见光全双工通信的旋转部件数据传输系统设计》
无线光通信技术具有体积小、重量轻、传输速率高、抗电磁干扰性强、传输带宽大等优势,在非接触数据传输领域有广泛的应用。
2. 电源传输方案
对于上下两块电路板之间的电源传输,L1采用了电磁感应方案,该技术在无线充电方面被广泛应用。
根据电磁感应原理,电和磁场在一定条件下能够互相转换。电能传输的原理如下:
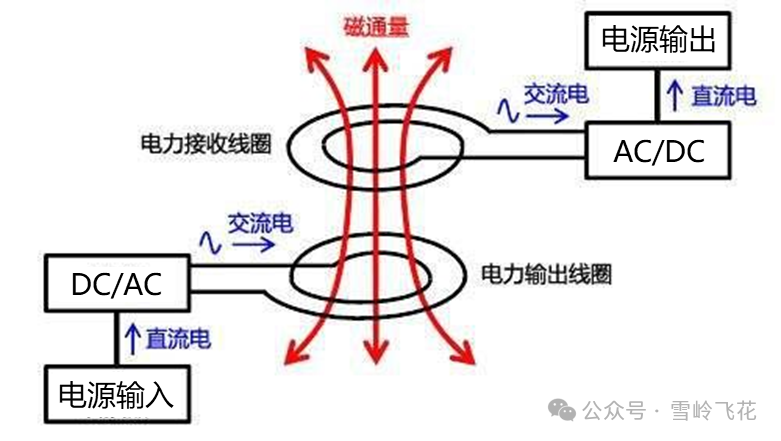
当电流流过发送端线圈时,会产生磁场,而接收端线圈通过感应这个磁场产生电流,从而实现电能的无线传输。
3. 感知性能
从上述结构分析中可以看到,L1产品采用了单点EEL+APD方案,未采用大算力处理芯片,使用UART对外传输点云数据。
从测距范围和点频密度来看,宇树L1适用于较近距场景,是一种低成本的激光雷达解决方案。
阅读 953
喜欢此内容的人还喜欢
AI芯片—GPU工作原理
车规半导体硬件
不喜欢
不看的原因
确定
- 内容低质
- 不看此公众号内容

揭秘AI思维差异:斯坦福发现Qwen模型"与生俱来"的自我纠错能力,而Llama却天生欠缺这一关键特质
AlgoChemist
不喜欢
不看的原因
确定
- 内容低质
- 不看此公众号内容

新出的一款TTS模型:Orpheus TTS,情感表达贴近人类
关注的号
NLP工程化
不喜欢
不看的原因
确定
- 内容低质
- 不看此公众号内容


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









