






本案例采用 三易串口屏带485功能,一包香烟的钱即可低成本控制单轴或多轴的485通讯位置控制
这里以单轴控制为例,涉及到的知识要点:
①、伺服驱动器的参数读写
②、读出编码器位置的数据变换,以及与实际机械位置对应
③、输入一个数据进行拆分为圈数和圈内脉冲数,并传入伺服驱动器里
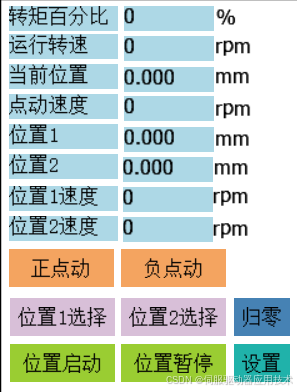
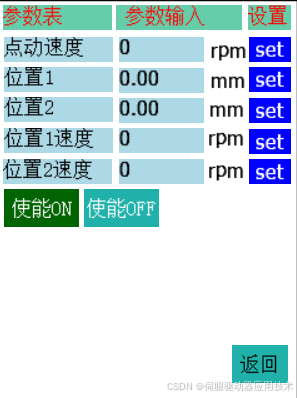
串口屏设置两个画面,可实现功能,电机在安装在机械上后,可以先点动到任意位置,然后点归零就可以设置机械坐标。然后可以手动去寻位置(就好比对刀),点击 SET 那么就设置了位置1,并且可以在参数输入里,进行输入(好比设置刀补),然后可以设置位置2(就好比退刀点)设置好速度,可以IO启动位置,也可以在触摸屏上位置启动,运行过程中可以位置暂停,再次位置启动会继续之前的位置走完,断电上电无需归零,直接定位。也可以按原来的位置直接定位,位置精准。就这么简单的一个单轴控制的串口屏,仅仅使用485控制,可实现这些功能。
首先来看看各种读指令,在定时器里。
---------------------------------------------------------------------------------------------------------------------------
byte a[4];
int b;
int e;
int f;
int g;
int h;
int i;
int j;
modbusRead(0x01,0x03,0x1007,1,20);
num19.val=bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x1000,1,20);
num20.val=bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x1018,2,20);
a[1]=modbus.rxBuf[3];
a[2]=modbus.rxBuf[4];
a[3]=modbus.rxBuf[1];
a[4]=modbus.rxBuf[2];
numf21.valf=bytesToInt(a,1,1)/1000.000;
modbusRead(0x01,0x03,0x0015,1,20);
num22.val= bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x0202,1,20);
e= bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x0203,1,20);
f= bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x000b,1,20);
g= bytesToShort(modbus.rxBuf,1,1);
numf23.valf=((g*e)+f)/1000.000;
modbusRead(0x01,0x03,0x0205,1,20);
h= bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x0206,1,20);
i= bytesToShort(modbus.rxBuf,1,1);
numf24.valf=((g*h)+i)/1000.000;
modbusRead(0x01,0x03,0x0204,1,20);
num25.val=bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x0207,1,20);
num26.val=bytesToShort(modbus.rxBuf,1,1);
var34.val=g;
---------------------------------------------------------------------------------------------------------------------------------
指令解析:
1、读扭矩,01站号 03读指令 0x1007 监控转矩地址 1 读一个字 20 时间20ms
modbusRead(0x01,0x03,0x1007,1,20);
num19.val=bytesToShort(modbus.rxBuf,1,1);
2、读位置 01站号 03读指令 0x1018 编码器位置地址 2 读两个字 20 时间20ms
modbusRead(0x01,0x03,0x1018,2,20); 0x1018连续读2个字
a[1]=modbus.rxBuf[3];
a[2]=modbus.rxBuf[4];
a[3]=modbus.rxBuf[1];
a[4]=modbus.rxBuf[2]; 使用数组进行字节序变换,3412→1234序
numf21.valf=bytesToInt(a,1,1)/1000.000; 定义了一个脉冲当量0.001,所以除以1000.000
3、读圈数/圈内脉冲数/一圈脉冲数/并计算 显示位置1数据和位置2数据
modbusRead(0x01,0x03,0x0202,1,20);
e= bytesToShort(modbus.rxBuf,1,1); 读出来第一段位置圈数
modbusRead(0x01,0x03,0x0203,1,20);
f= bytesToShort(modbus.rxBuf,1,1); 读出来第一段圈内脉冲数
modbusRead(0x01,0x03,0x000b,1,20);
g= bytesToShort(modbus.rxBuf,1,1); 读出来一圈脉冲数
numf23.valf=((g*e)+f)/1000.000; 显示位置1数据
modbusRead(0x01,0x03,0x0205,1,20);
h= bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x0206,1,20);
i= bytesToShort(modbus.rxBuf,1,1);
numf24.valf=((g*h)+i)/1000.000; 同理该段显示位置2数据
4、显示位置1和位置2 设置的速度
modbusRead(0x01,0x03,0x0204,1,20);
num25.val=bytesToShort(modbus.rxBuf,1,1);
modbusRead(0x01,0x03,0x0207,1,20);
num26.val=bytesToShort(modbus.rxBuf,1,1);
5、定义全局变量一圈脉冲数为了方便在第二页触摸屏调用
var34.val=g;
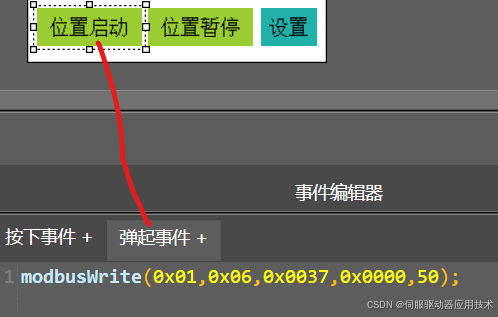
6、设置启动位置,由于位置启动是沿信号,这里设置按下时写相应数据,弹起置零。
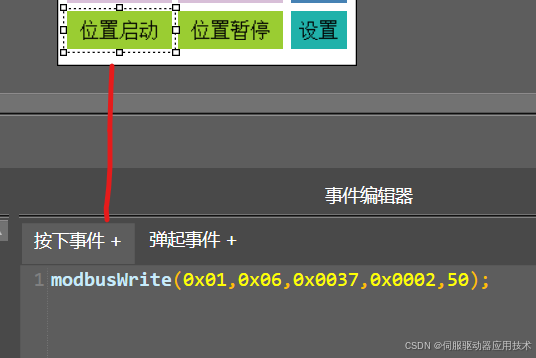
我们看指令,0x0037其实就是PA-55的寄存器地址,驱动器里P3-1(DI2)设置了28
PA-55的位参数 从右往左数分别是DI1 DI2 DI3 DI4.....写2就相当于bit1写1,也就是启动了DI2位置触发信号
P3-2设置了27 位置暂停 PA-55写4相当于bit2写1 启动了DI3暂停
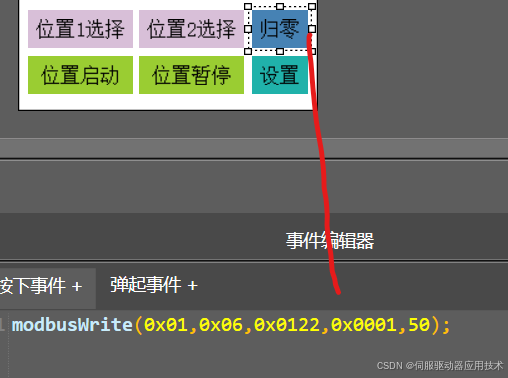
7、归零,也就是编码器清零,设置机械原点 0x0122写1 也就是按1抬0
8、点动以及设置位置1和位置2
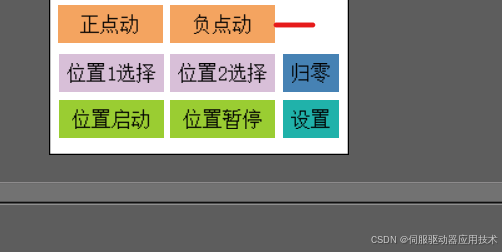
正点动JOGN 负点动 JOGP 使用强制IO来实现 寄存器地址0x0111 具体看上节强制IO

位置1选择 位置2选择 寄存器地址0x01112写对应的位来选择位置

9、位置1和位置2是重点,该界面其他设置比较简单不做讲解。
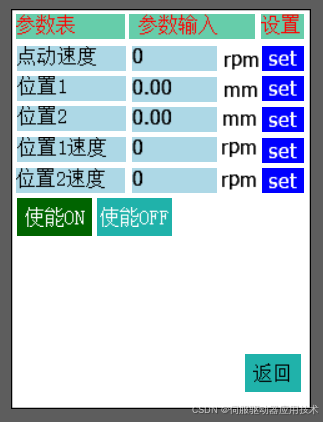
点击位置1后面的 set 按钮 按下事件程序如下:
int wz1;
int aa;
int bb;
wz1=floatToInt(numf2.valf*1000);
aa=wz1/page0.var34.val;
bb=wz1%page0.var34.val;
modbusWrite(0x01,0x06,0x0202,aa,20);
modbusWrite(0x01,0x06,0x0203,bb,20);
全局变量var34把page0的一圈脉冲数 调用过来
输入的数据wz1对page0.var34.val进行除整,得到数据写入圈数里
输入的数据wz1对page0.var34.val进行除余,得到数据写入圈内脉冲数里
本伺服驱动器设置位置只有圈数和圈内脉冲数概念,所以输入一个整体数据,进行除整除余,然后传输到驱动器里。
int wz2;
int cc;
int dd;
wz2=floatToInt(numf3.valf*1000);
cc=wz2/page0.var34.val;
dd=wz2%page0.var34.val;
modbusWrite(0x01,0x06,0x0205,cc,20);
modbusWrite(0x01,0x06,0x0206,dd,20);
总结:本例串口屏485通讯程序比较简单,主要讲解了485通讯内部位置的思路,便于加深理解。

















 4094
4094

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









