






 本文介绍了卷积神经网络中卷积计算的基础知识,包括输入输出特征图尺寸的计算公式,卷积核参数量的确定,卷积操作的矩阵表示,以及感受野的计算方法。还特别讨论了空洞卷积的输入输出尺寸计算,并引用了相关深度学习资源。
本文介绍了卷积神经网络中卷积计算的基础知识,包括输入输出特征图尺寸的计算公式,卷积核参数量的确定,卷积操作的矩阵表示,以及感受野的计算方法。还特别讨论了空洞卷积的输入输出尺寸计算,并引用了相关深度学习资源。
前言
卷积的计算是CNN中最基本的算术单元,卷积的计算过程中出现的:Input Feature Map(FP), Output Feature Map(FP), 以及与 Kernel(size, strides, padding, dilation rate等)之间的关系和计算方式是我们应该掌握的基本知识。笔者在这里对其进行简要介绍。
卷积Input FP size 与 Output FP size之间的计算公式
1、如图1所示, 其展示了从Input FP 经过卷积计算得到 Output FP的过程,每个通道相互之间独立;
 图 1:卷积计算示意图
图 1:卷积计算示意图
2、假设Input FP的channels数为n_in, Output FP的channels数为n_out为例,kernel为方形,大小为k, Input FP的Padding为p, 卷积计算的步长(stride)为s。则输入输出的关系如下: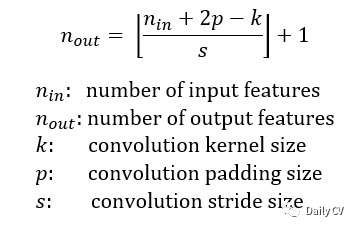
3、如图2计算示意图;由于卷积计算采用权值共享,输出的FP的每个channel是由输入FP经过n_in个卷积后采用elementwise add叠加得到一个Output FP channel,一个channel卷积的参数量为n_in * k * k,Output FP channel有n_out个channel, 所以整个卷积核参数量为:n_in * k * k * n_out.
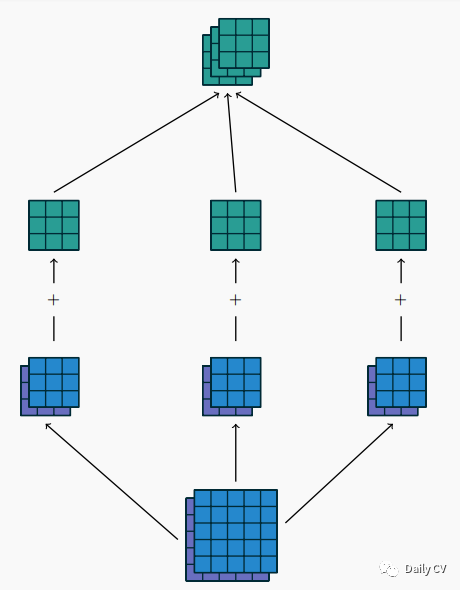
图 2:Input FP(Channel: 2), Output FP(Channel: 3), Kerenl(Size: 3x3)
卷积计算方法(Convolution as a matrix operation)
以3*3卷积核K对4*4的特征图(FP)I做计算为例,将输入FP按从左到右,从上往下展开成一个16-d的向量I_vector,那么对应的3*3的卷积核应该展开如下C(4 * 16):

然后C * I_vector ==> O_vector(1*4); 最后对O_vector处理成2*2,得到输出FP。
感受野计算(Receptive Field Arithmetic)
两层之间的感受野是指下层的FP中某一点对应上一层的size, 也就是kernel的大小。但是这里要讨论的是,某一层FP中像素对应与原始输入图像的感受野(RF)的大小如何计算?
这里笔者先直接给出计算公式,然后解释下公式中参数的定义,同时读者自己需要手推揣摩这种计算方式。
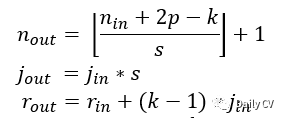
1、公式第一行中的参数定义与上述一样;
2、第二行中的j_in表示当前层的Jump, 这个参数与stride相关,其表示截至到目前层的总stride,该j直接影响第三行中r的计算;
3、第三行中r表示当前层FP中的某一个点对应的感受野的大小。
空洞卷积(Dilated Conv)输入与输出尺寸计算公式
dilate_rate为d, kernel的尺寸为k的卷积核的有效尺寸为:K = k + (k-1)*(d-1)
则有:输出o与输入i尺寸之间计算 
参考:
1、A guide to convolution arithmetic for deep learning.
2、A guide to receptive field arithmetic for Convolutional Neural Networks.

















 3240
3240

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









