



 矿山无人驾驶运输领军企业踏歌智行完成2亿元B轮融资,由前海母基金和宝通投资领投。此轮资金将用于产品量产、功能升级及服务体系优化。
矿山无人驾驶运输领军企业踏歌智行完成2亿元B轮融资,由前海母基金和宝通投资领投。此轮资金将用于产品量产、功能升级及服务体系优化。
10月30日,矿山无人驾驶运输的领军企业踏歌智行完成了2亿元的B轮融资,是无人驾驶矿山赛道迄今为止最大一笔融资。本轮融资由前海母基金和宝通投资共同领投,清研资本、蓝焱资本等跟投。踏歌智行继2019年连续完成三轮融资后,再创行业新高,在商业进展和融资步调上保持领先。
踏歌智行作为露天矿无人驾驶运输的头部企业,仅2019年就签订了超亿元商业合同。与包钢集团白云鄂博铁矿签订的矿用卡车无人驾驶合同已于今年10月完成第二阶段项目验收。与国家电投南露天煤矿的无人驾驶合同是国内首个公开招标的煤矿无人驾驶运输项目,已于今年6月顺利完成交付验收。与国内最大的煤矿EPC中环协力的200台无人驾驶宽体车合同已交付3个作业编组,在中环协力的鄂尔多斯永顺煤矿实现24小时连续运营。现有客户对踏歌产品的系统性能和工程服务表示满意,POC项目向商业订单的转化率超80%,后续订单超过3亿元。

永顺煤矿无人驾驶宽体车车队夜班作业
目前踏歌智行的客户已经覆盖能源、金属等领域的大型国有企业集团和国内最大的煤矿EPC中环协力等矿山行业标杆企业。和包钢集团、北方股份、中国移动、华为等企业组建了智能矿山产业推进联盟,并与国内矿用卡车龙头企业北方股份结为“一致行动人”,共同推进预装无人驾驶系统的新车销售和在用卡车的无人化升级改造。

无人驾驶矿用卡车自动收发车
本轮领投方之一宝通科技董事长包志方表示,“踏歌智行是国内最领先的矿区无人驾驶运输方案提供商。目前踏歌智行的产品已经开始规模化部署,露天矿无人驾驶运输系统 --“旷谷™”支持不同品牌型号的大型矿卡和宽体车,获得行业内高度认可。
未来,宝通科技将充分利用自身行业资源和全球化布局,让宝通的无人值守输送带运输系统和踏歌智行的无人矿卡运输形成功能和场景的优势互补,共同探索工业散货智能输送数字化发展的新模式和新机制。我们从参与踏歌Pre-A轮融资至今,一直持续加码,未来还将继续支持踏歌智行扩大国内业务规模,拓展海外业务。”
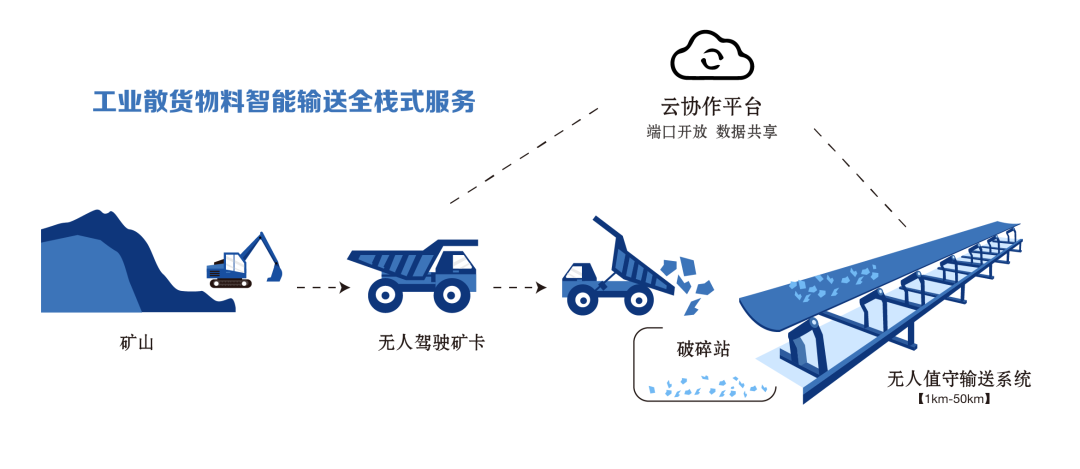
输送带运输和矿用卡车无人运输的场景互补
国家“万人计划”科技创新领军人才、踏歌智行创始人兼首席科学家余贵珍教授表示:“踏歌智行专注于矿山无人运输,提供全栈式无人运输解决方案,于2019年初实现了无人驾驶矿用卡车多编组作业,又于2020年实现了无人夜班作业与驾驶室无人值守,开启了规模化工程部署。”

无人驾驶矿卡安全员离开驾驶舱
踏歌智行自研的车载硬件计算平台M-box已经完成了第三次大版本迭代,集成了5G通信模组,通过了中国计量院针对环境、可靠性和EMC在内的多项车规级检测认证,是国内最早一批集成了5G + C-V2X通信、支持高性能并行计算、高安全决策控制,并通过车规认证的车载域控制器。

集成了5G +C-V2X多模通信模组的
踏歌第三代车载计算平台M-box 3.0
“本轮融资将加速产品量产和功能升级,优化供应链和服务体系,强化工程交付能力,确保在手订单的优质交付和储备项目的迅速启动。”余贵珍说到。
本轮领投方之一前海母基金高级副总裁周泽普认为:“目前绝大部分无人驾驶应用场景还处于验证阶段,而踏歌智行另辟蹊径选择矿山场景。该场景低速、封闭、运货不运人,客户痛点突出。踏歌智行具有极强的技术研发实力,产品矩阵丰富,工程部署模块化,功能覆盖矿山多种业务需求。我们相信踏歌智行必能在无人驾驶技术工程化落地方面引领行业。”
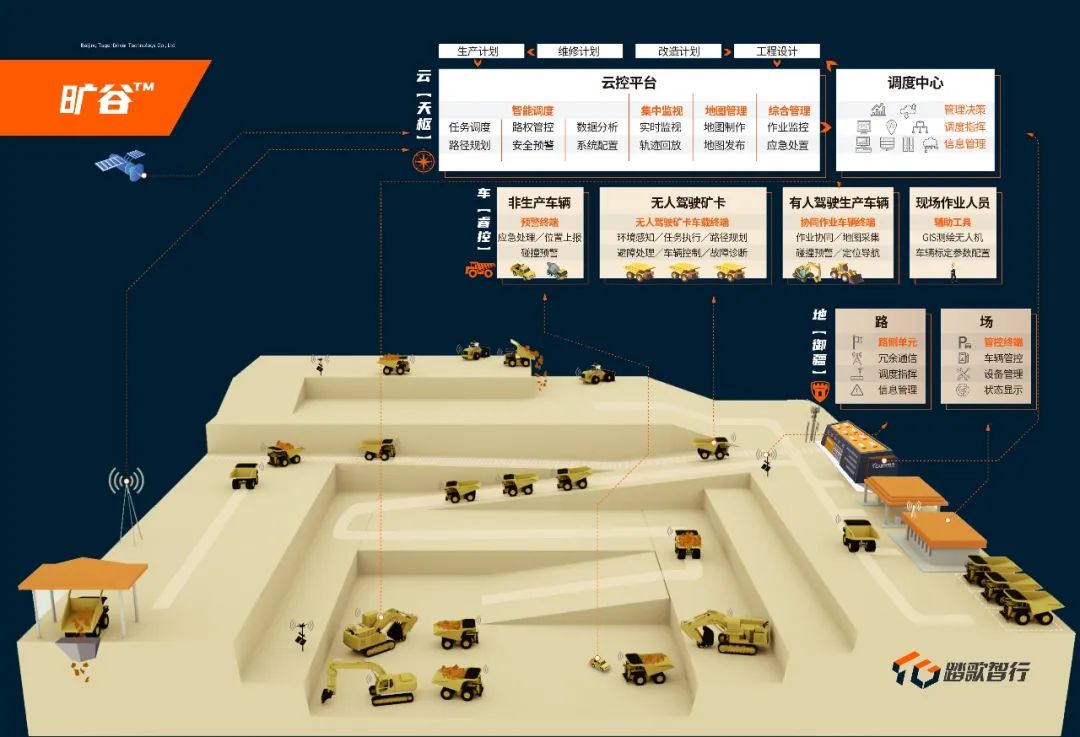
露天矿无人驾驶运输全栈式解决方案“旷谷™”展示图
清研资本投资总经理周秋东表示:“近十年来,我们一直专注于投资汽车行业技术与服务的创新型科技企业。我们看好余贵珍教授所带领的富有战斗力、执行力的团队,也看好踏歌智行在技术和商业上的积累,更看好整个行业的未来。期待我们紧密的合作能够为行业创造价值,也期待踏歌智行的产品与方案在矿区赛道攻下更多的城池。”
央视多次报道踏歌智行在白云鄂博铁矿的
5G智慧矿山项目应用
最后,余贵珍教授透露,根据目前市场强劲的需求、产品迭代速度、融资节奏和业务发展状况,我们有信心在1~2年内具备科创版上市条件。
矿山无人驾驶运输是一个千亿级的市场,我们愿意积极联合产业上下游企业,共同打造产业生态,推进标准制定,培育国内市场,进军国外蓝海,让中国制造智能装备引领矿山开采无人化革命。

















 9044
9044

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









