




 本文介绍了惯性导航的基本原理和PDR(步行者航位推算)的概念,强调了在室内定位中的优势和挑战。通过使用IMU设备收集数据来估算步长和方向,实现人员定位跟踪。同时提到了PDR的初始条件和推算公式,指出精准计算步长和方向是关键技术。此外,内容还提及了作者在大数据领域的学习路径,包括Hadoop入门系列文章。
本文介绍了惯性导航的基本原理和PDR(步行者航位推算)的概念,强调了在室内定位中的优势和挑战。通过使用IMU设备收集数据来估算步长和方向,实现人员定位跟踪。同时提到了PDR的初始条件和推算公式,指出精准计算步长和方向是关键技术。此外,内容还提及了作者在大数据领域的学习路径,包括Hadoop入门系列文章。
前言
PDR的应用基础是基于RSSI的室内定位,进行室内导航与航迹规划。
惯性导航概述
惯性导航是一种不借助外力(接收本体之外的信号)的自主性导航,你只要知道自己的初始位置,知道自己的初始朝向,知道自己每一时刻如何改变了朝向,知道自己每一时刻相对朝向是怎样走的,这样就能得到每时每刻自己的位置。
什么是惯性导航
PDR定义(百度百科)
步行者航位推算(Pedestrian Dead Reckoning,PDR)是对步行者行走的步数、步长、方向进行测量和统计,推算出步行者行走轨迹,和位置等信息。
主要是在无信标环境下使用惯性测量单元(Inertial Measurement Unit,IMU)感知人员在行进过程中的加速度、角速度、磁力和压力等数据,并利用这些数据对行进人员进行步长与方向的推算,从而达到对人员进行定位跟踪的目的,其中主要涉及的过程有步态检测、步长和方向计算。PDR原理图如下:

PDR初始条件:已知初始位置S0(N0,E0)
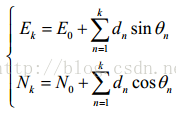
根据推算公式,可以得出任意时刻k的位置Sk(Nk,Ek)。
其中:关键的信息是步长计算和方向估计。
因此:PDR进行室内定位的难点在于:由IMU采集的加速度、角速度和磁力等数据精确推算出人员运动的步长和方向。
下面是一个补充内容:
大数据技术
小编目前从事大数据工程,小编对Hadoop入门学习知识进行了汇总,帮助大家更好地入手大数据。小编关于Hadoop入门总共发写了12篇公众号原创文章,小编带你解锁正确的阅读顺序。按这个顺序阅读并去实操,相信你一定可以学会的,具体文章阅读顺序如下:
第1篇:Linux常用知识总结
第3篇:Shell入门编程基础篇
第4篇:Shell入门编程进阶篇
第5篇:大数据思维,到底是什么?
第6篇:必懂的大数据常识,get到了吗?
第7篇:大数据之Hadoop运行环境搭建
第10篇:Hadoop伪分布模式之案例实操
第12篇:Hadoop编译源码(面试重点)
以上便是Hadoop入门学习相关文章的阅读顺序,希望能帮助到大家,也能促进我自己的学习!同时,欢迎各位关注微信公众号:破晓大数据,转载转发、点赞收藏文章!

















 390
390

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









