



 本文深入探讨了UKF(无迹卡尔曼滤波)的工作原理及其在非线性系统中的优势与挑战。与EKF相比,UKF通过无迹变换避免了线性化误差,但在高维状态和强非线性情况下可能面临稳定性问题。文章详细解释了如何选择sigma点和设置权重,以及UKF算法的具体步骤。
本文深入探讨了UKF(无迹卡尔曼滤波)的工作原理及其在非线性系统中的优势与挑战。与EKF相比,UKF通过无迹变换避免了线性化误差,但在高维状态和强非线性情况下可能面临稳定性问题。文章详细解释了如何选择sigma点和设置权重,以及UKF算法的具体步骤。
UKF 原理及仿真
UKF的优势
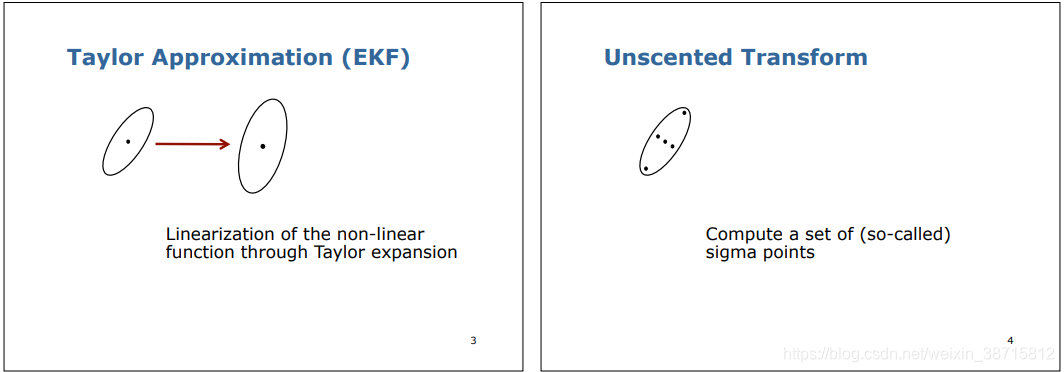
- EKF是线性卡尔曼滤波,会引入线性化误差
- EKF需要计算Jacobian矩阵,不易实现
UKF的问题
- 低维状态仿真效果超好,实际生产过程中的高维状态使用ukf非常不稳定
- 此方法在非线性程度小的时候,可以削弱非线性的影响。弱点是当非线性程度强的时候,协方差的更新容易出现负定矩阵的情况。
UKF原理
并不对非线性方程f和h在估计点处做线性化逼近,而是利用无迹变换在估计点附近确定采样点,用这些点的高斯密度来近似状态的概率密度函数
In general,
n
+
1
\bm{n+1}
n+1 sigma points are necessary and sufficient to define a discrete distribution having a given mean and covariance in
n
\bm{n}
n dimensions.
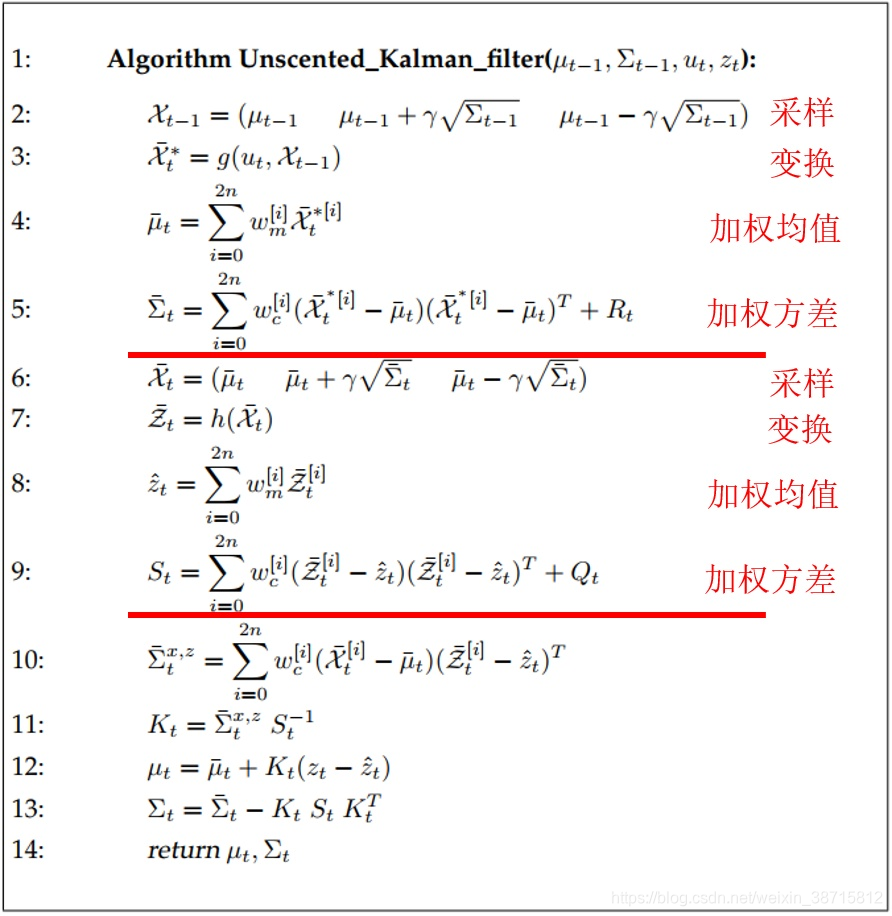
UKF 步骤
steps
- Compute a set of sigma points(这些点的均值和协方差等于原状态分布的均值和协方差)
- Each sigma points has a weight
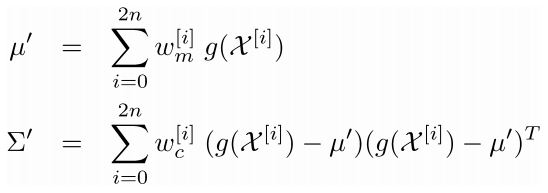
- Transform the point through the nonlinear function(状态方程)
- Compute a Gaussian from weighted points
two problems
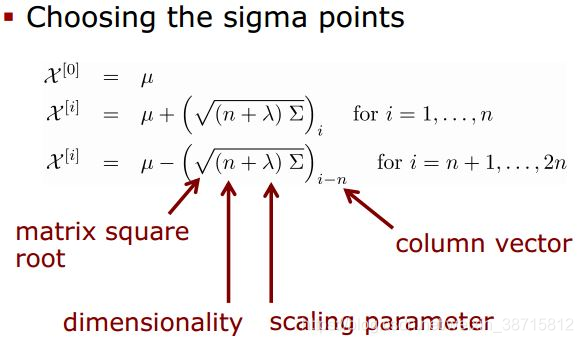
How to choose the sigma points?
A canonical set of sigma points is the symmetric set originally proposed by Uhlmann.
- 选择的sigma点满足以下式子:
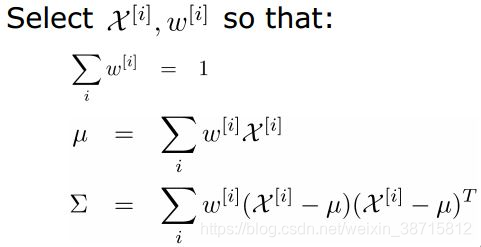
- 第一个点选择均值,其余点根据另外两个式子选择:
How to set the weights?
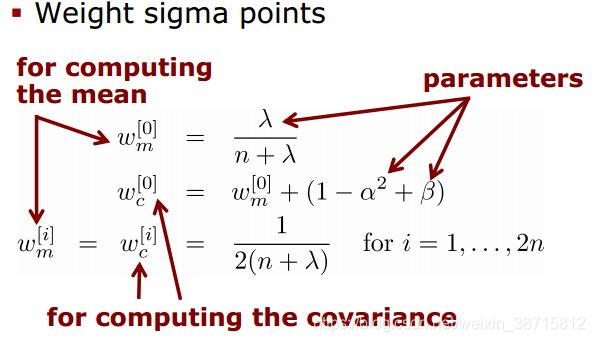
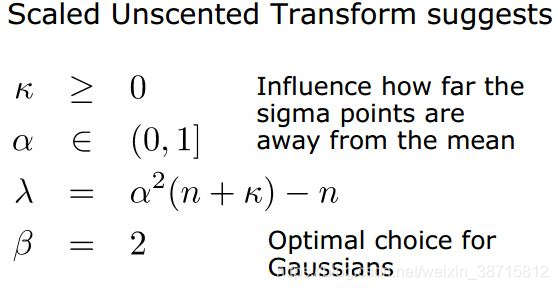
其他参数的选择
UKF 算法

















 1797
1797

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









